
激光测风雷达信号去噪方法及装置.pdf

一条****发啊

1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光测风雷达信号去噪方法及装置.pdf
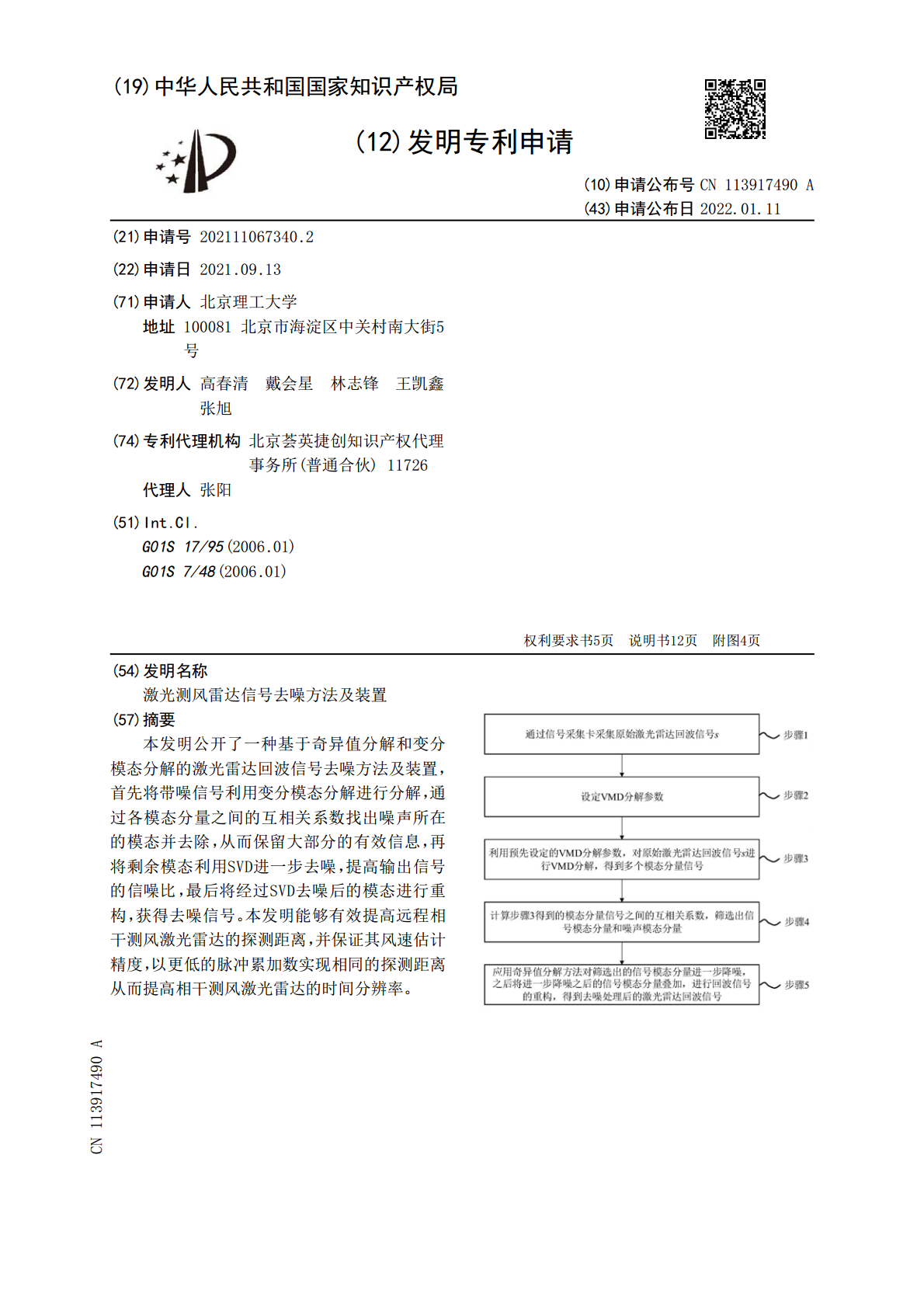
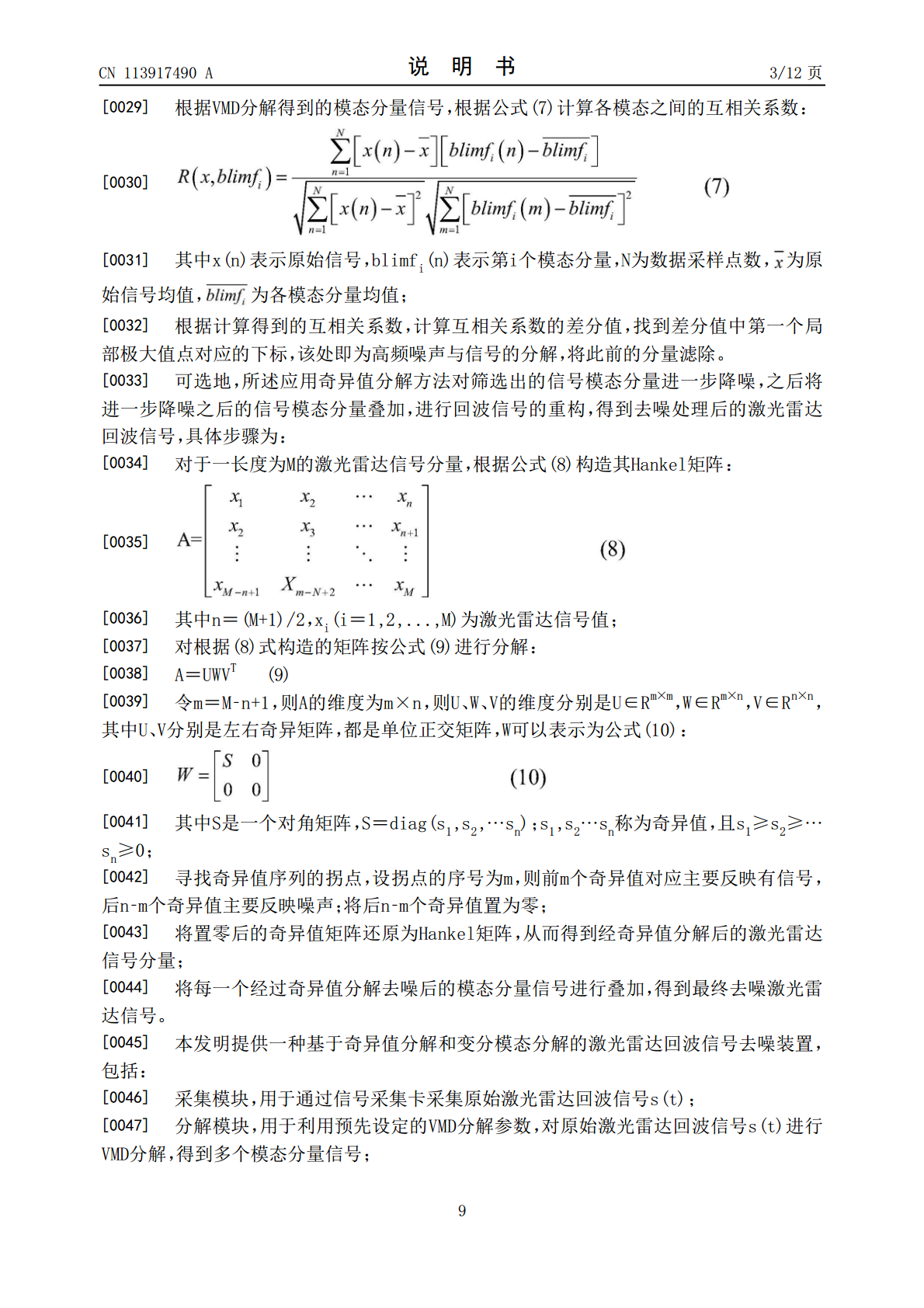
本发明公开了一种基于奇异值分解和变分模态分解的激光雷达回波信号去噪方法及装置,首先将带噪信号利用变分模态分解进行分解,通过各模态分量之间的互相关系数找出噪声所在的模态并去除,从而保留大部分的有效信息,再将剩余模态利用SVD进一步去噪,提高输出信号的信噪比,最后将经过SVD去噪后的模态进行重构,获得去噪信号。本发明能够有效提高远程相干测风激光雷达的探测距离,并保证其风速估计精度,以更低的脉冲累加数实现相同的探测距离从而提高相干测风激光雷达的时间分辨率。
相干测风激光雷达信号检测解调装置.pdf
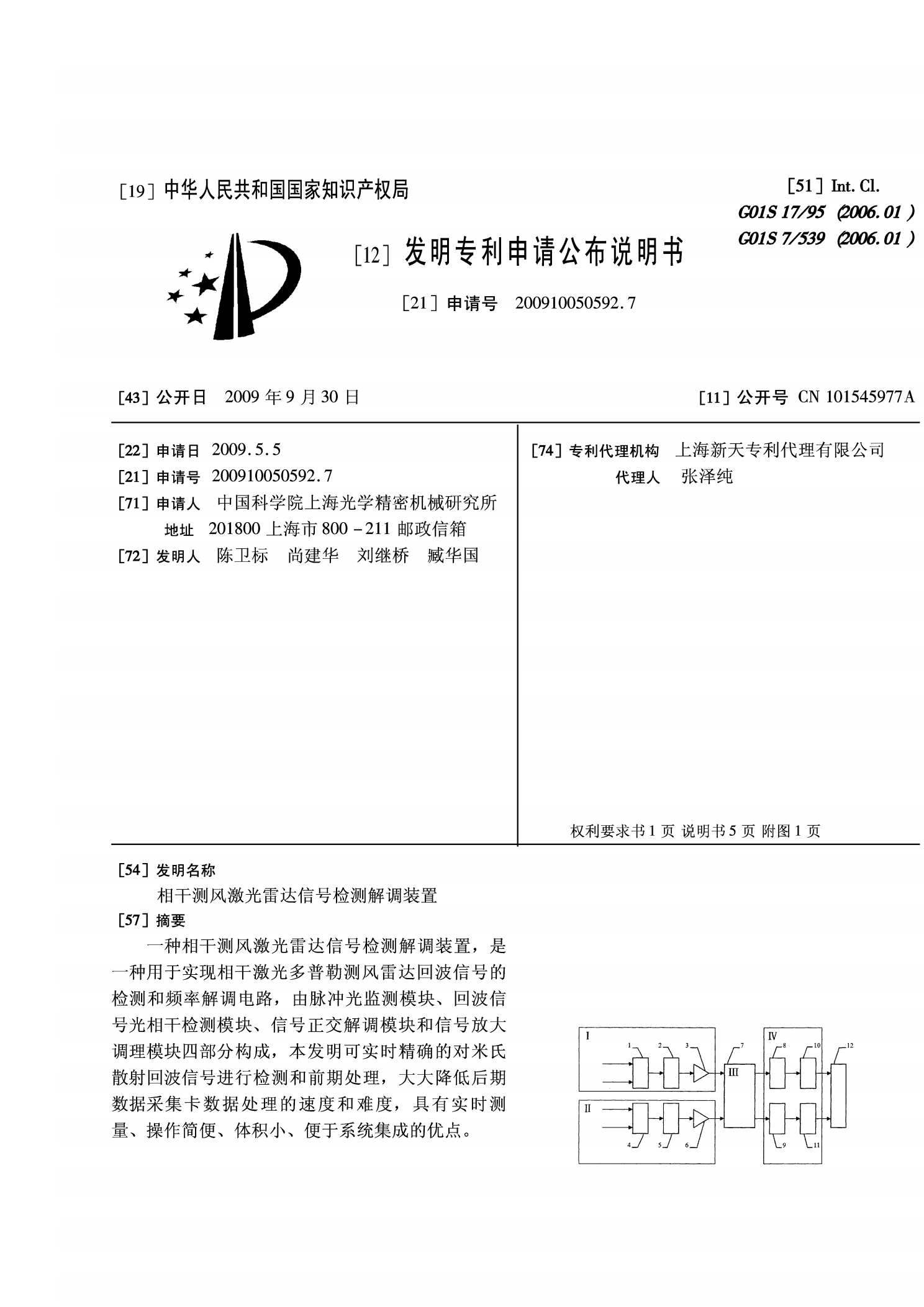
一种相干测风激光雷达信号检测解调装置,是一种用于实现相干激光多普勒测风雷达回波信号的检测和频率解调电路,由脉冲光监测模块、回波信号光相干检测模块、信号正交解调模块和信号放大调理模块四部分构成,本发明可实时精确的对米氏散射回波信号进行检测和前期处理,大大降低后期数据采集卡数据处理的速度和难度,具有实时测量、操作简便、体积小、便于系统集成的优点。

测风激光雷达装置.pdf
现有方法中,到来风速、切变、风向等到来风的信息的预测精度较低。本发明的测风激光雷达装置(1B)搭载于风车(2),在针对风车(2)的正面方向而确定的多个光束方向上将脉冲的激光即发送光发送到大气中,并根据发送光被与大气一起移动的粒子所反射而得的反射光相对于发送光的多普勒频移来测量各光束方向上的相距风车的多个距离处的风速。包括:频谱累计部(12c、12e),其求出累计频谱,该累计频谱通过按照每个光束方向和时间区间的组合即风速测量区间对从上次计算出风速后被发送的多个所述脉冲中的分割接收信号得到的频谱进行累计而得到

基于EMD的激光雷达回波信号去噪方法研究的中期报告.docx
基于EMD的激光雷达回波信号去噪方法研究的中期报告第一部分:研究背景和意义激光雷达是一种重要的遥感技术,在三维建模、环境感知、无人驾驶等领域有着广泛的应用。然而,在实际应用中,激光雷达回波信号通常会受到噪声的影响,降低数据质量和分析准确性。因此,对激光雷达回波信号进行去噪处理具有重要意义。现有的去噪方法包括滤波、小波变换、稀疏表示等,但在去除噪声的同时也容易损失数据特征,影响目标识别和测量精度。因此,本研究选择基于经验模态分解的方法进行研究,该方法可以提取出信号中的局部频率信息,并能够有效地去除噪声。第二

光信号的去噪方法和装置.pdf
一种光信号的去噪方法,包括如下步骤:接收光信号,生成模拟的光脉冲信号;将光脉冲信号转化为数字光信号;获取数字光信号中各脉冲的至少二种脉冲特征信息;生成以至少二种脉冲特征信息作为坐标轴的二维或二维以上的数字光信号的散点图;根据数字光信号的散点图中有效数据点和噪声数据点分布区域相对分离的特点,去除数字光信号中噪声数据点对应的脉冲数据,生成有效光信号;存储有效光信号。本发明还提供一种对应的光信号的去噪装置。上述光信号的去噪方法和装置是采用多维去噪。通过实验验证,与传统技术比较,本发明的光信号的去噪方法和装置能够