
基于域不变序列变换的滚动轴承故障诊断迁移学习方法.pdf

俊凤****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于域不变序列变换的滚动轴承故障诊断迁移学习方法.pdf
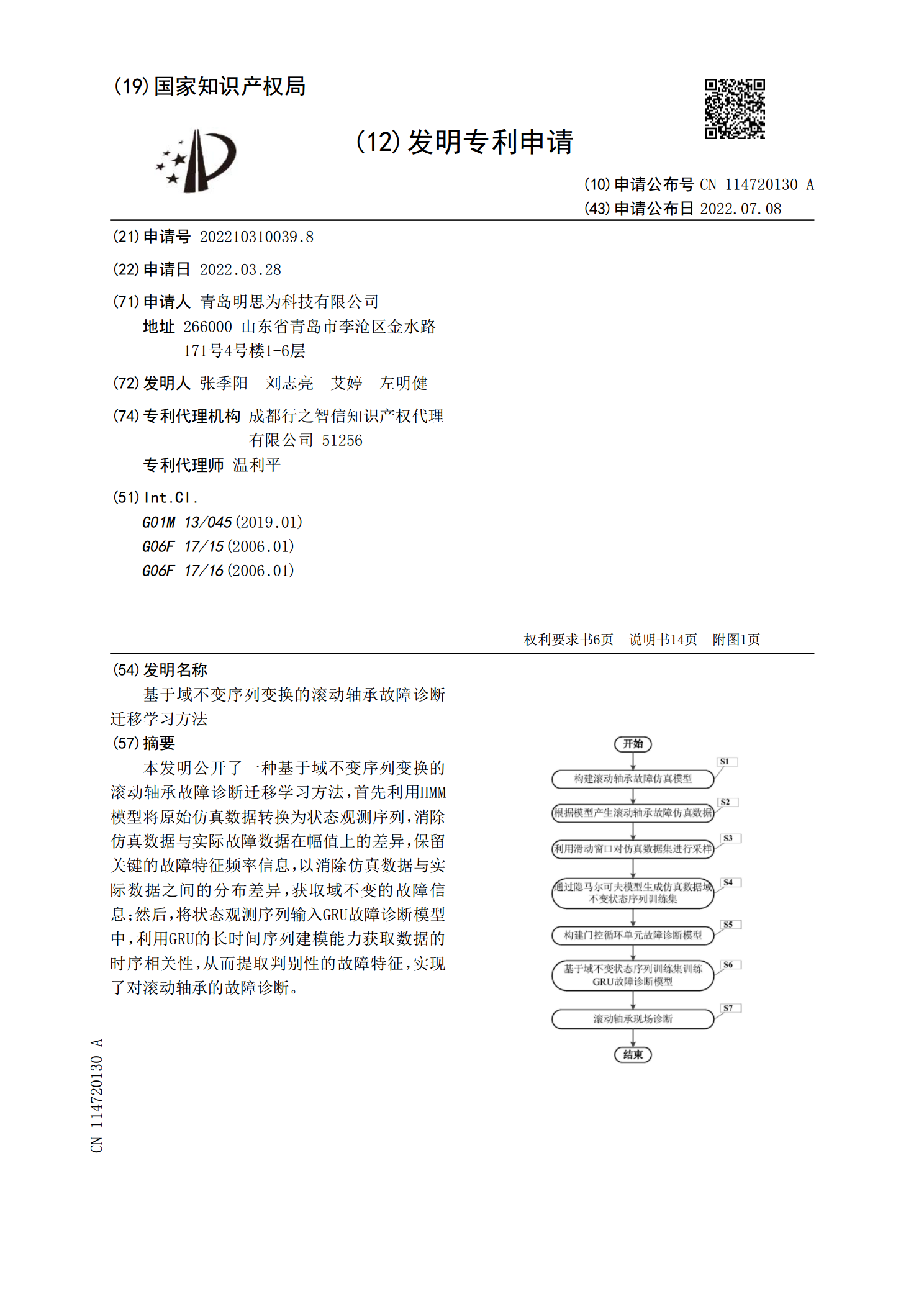
本发明公开了一种基于域不变序列变换的滚动轴承故障诊断迁移学习方法,首先利用HMM模型将原始仿真数据转换为状态观测序列,消除仿真数据与实际故障数据在幅值上的差异,保留关键的故障特征频率信息,以消除仿真数据与实际数据之间的分布差异,获取域不变的故障信息;然后,将状态观测序列输入GRU故障诊断模型中,利用GRU的长时间序列建模能力获取数据的时序相关性,从而提取判别性的故障特征,实现了对滚动轴承的故障诊断。

基于声信号小波变换的滚动轴承故障诊断的开题报告.docx
基于声信号小波变换的滚动轴承故障诊断的开题报告一、选题背景与意义滚动轴承是旋转机械中的重要部分,其负责支撑和转动附着在其上的轴承。然而,由于长时间的持续使用以及制造和安装中的缺陷,滚动轴承可能会出现故障,导致设备损坏和生产停止。因此,准确和及时地诊断滚动轴承故障是维护机械设备性能稳定和保证工业生产安全的重要手段。传统传感器监测滚动轴承的方法主要是通过振动、噪音和温度等信号来诊断故障。然而,这些信号存在噪声和干扰,使得诊断结果不够准确。因此,近年来,基于信号处理技术的滚动轴承故障诊断方法备受研究者关注。其中

基于声信号小波变换的滚动轴承故障诊断的任务书.docx
基于声信号小波变换的滚动轴承故障诊断的任务书任务书:基于声信号小波变换的滚动轴承故障诊断一、研究背景滚动轴承是机械设备中常见的关键零部件,在机械运动中具有重要的作用。然而,由于使用和环境的影响,滚动轴承的损坏和故障会导致机械设备的停机和损坏,给生产和经济带来损失。为了确保机械设备的稳定性和可靠性,需要对滚动轴承进行实时监测和故障诊断。其中,声信号在滚动轴承故障诊断中占有重要地位。随着电子技术和计算机技术的发展,基于小波分析的声信号处理方法逐渐成为滚动轴承故障诊断的研究热点。二、研究内容本次课题的研究内容是

基于双树复小波包流形域降噪的滚动轴承故障诊断方法.pdf
本发明涉及双树复小波包流形域降噪的滚动轴承故障诊断方法,该方法首先,利用加速度传感器采集滚动轴承的振动信号,其次,将振动信号进行双树复小波包分解,保留前两个节点的小波包系数,对余下节点的小波包系数进行阈值降噪,将各节点小波包系数进行单支重构,组成高维信号空间,然后,利用t分布随机近邻嵌入方法提取低维流形,并将低维流形逆重构获取高维空间主流形,得到降噪后的信号,最后,对降噪信号进行希尔伯特包络解调,获取振动信号的包络频谱,根据滚动轴承的内圈故障特征频率、外圈故障特征频率、滚动体故障特征频率和保持架故障特征频

一种基于流行保持迁移学习的滚动轴承故障诊断方法.pdf
本发明提出了一种基于流行保持迁移学习的滚动轴承故障诊断方法,结合局部线性空间判识(LFDA)和迁移成分分析(TCA),设计了保留局部流形结构的半监督迁移成分分析方法(TCAPLMS),在减少不同域数据集之间数据分布差异的同时,获取能够保留样本标签信息和状态特征信息的局部流形结构,此外提出基于故障敏感性和特征相关性的优选特征选择方法(PSFFC)嵌入到此框架中,以减少时频统计特征参数空间的冗余信息。本发明所提出的方法可以明显提高诊断准确性,且对实际工业场景具有强适应和泛化能力。