
基于联合多波位的高分辨DBS成像方法.pdf

书生****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于联合多波位的高分辨DBS成像方法.pdf
本发明公开了一种基于联合多波位的高分辨DBS成像方法。主要解决现有DBS成像分辨率较低的问题。其实现过程为:(1)利用雷达照射地面点目标的时间计算雷达相干积累脉冲数和需要联合的波位数;(2)根据需要联合的波位数对雷达多个波位的数据进行合并;(3)对合并后的数据进行距离向的脉冲压缩和方位向的傅里叶变换,得到多普勒通道数据;(4)取出多普勒通道数据中雷达主波束范围对应的部分,并计算该对应部分的数据在地面上的坐标;(5)利用求得的地面坐标将雷达主波束范围数据标记到地面上得到图像。本发明能在飞机飞行过程通过雷达进
基于多波位联合处理的单脉冲目标DOA估计方法.pdf
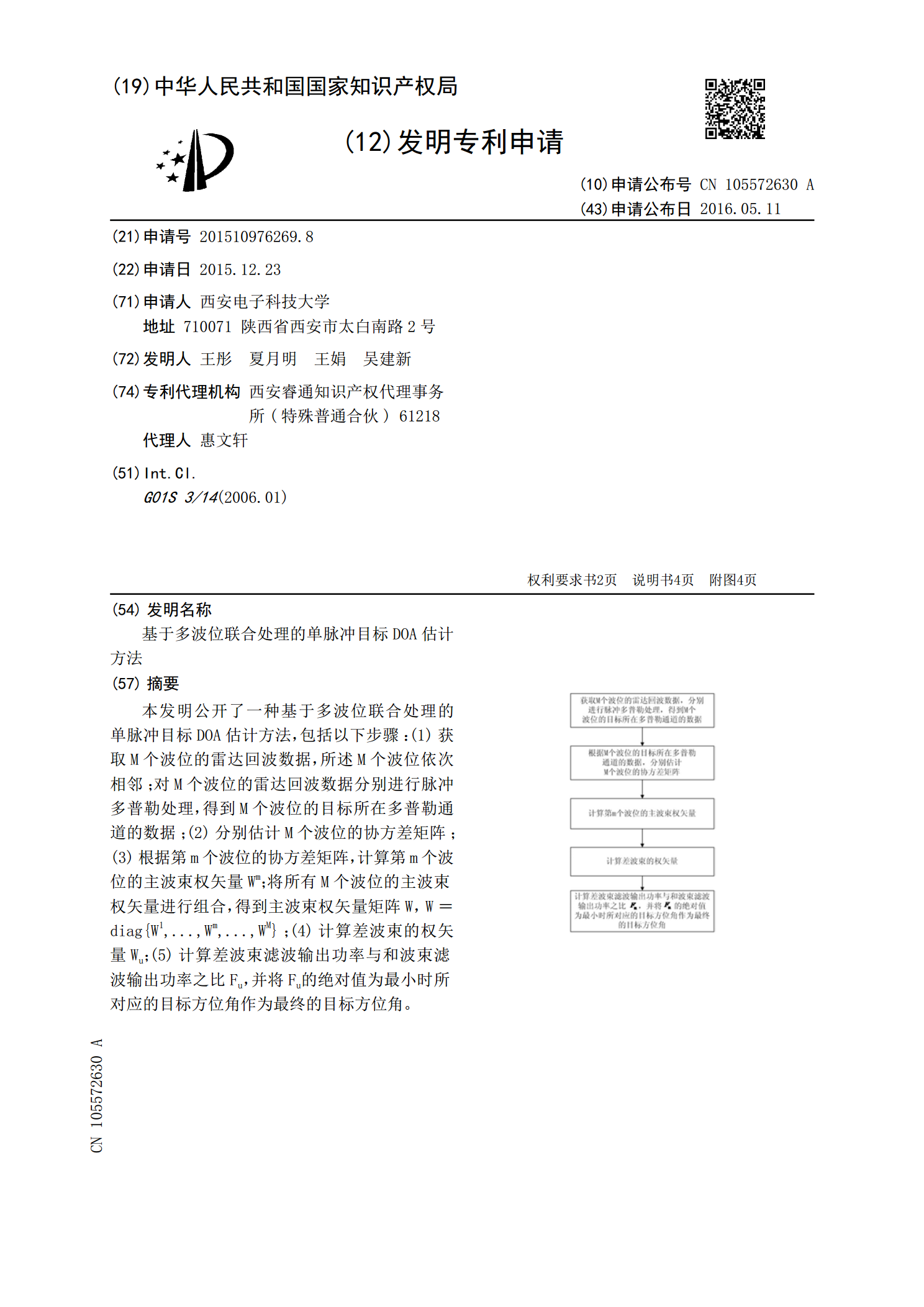
本发明公开了一种基于多波位联合处理的单脉冲目标DOA估计方法,包括以下步骤:(1)获取M个波位的雷达回波数据,所述M个波位依次相邻;对M个波位的雷达回波数据分别进行脉冲多普勒处理,得到M个波位的目标所在多普勒通道的数据;(2)分别估计M个波位的协方差矩阵;(3)根据第m个波位的协方差矩阵,计算第m个波位的主波束权矢量W

基于多波位联合处理的最大似然目标DOA估计方法.pdf
本发明公开了一种基于多波位联合处理的最大似然目标DOA估计方法,包括以下步骤:(1)获取M个波位的雷达回波数据,并分别进行脉冲多普勒处理,得到M个波位的目标所在多普勒通道的数据;(2)分别估计M个波位的协方差矩阵;(3)将第

基于多散射点模型的高分辨一维成像方法.pdf
本发明公开一种基于多散射点模型的高分辨一维成像方法,成像精度高。本发明方法包括:(10)雷达参数获取:获取雷达参数,包括脉冲串长度、步进初始频率、脉冲重复周期、脉冲宽度、频率步进间隔和初始相位;(20)多散射点目标模型建立:根据目标三维几何模型,得到目标面元模型,计算各距离单元内可见面元的雷达散射截面积,并将其按距离单元进行矢量合成,得到不同距离单元内各散射点的雷达散射截面积和空间坐标,改变交会条件,计算不同交会条件下各距离单元内的散射点参数,并对散射点参数进行统计处理,得到目标的多散射点模型;(30)高

基于涡旋电磁波的快速高分辨率成像方法.pdf
本发明公开了一种基于涡旋电磁波的快速高分辨率成像方法,该方法基于同心圆环阵列构建了俯仰角和方位角的二维成像模型,对接收的回波和观测矩阵借助球谐函数实现低秩分解,引入正交匹配追踪算法对观测平面内的散射点进行目标重建,从而实现了对雷达目标俯仰角和方位角的二维联合成像。本发明提出的联合OMP算法和球谐分解的成像方式与传统的广义逆求解方式相比,能够实现更高的成像分辨率,同时能大大缩减成像过程的运算量,有效节约计算时间。