
基于光学正交解调的相干零差多普勒测速激光雷达系统.pdf

是你****噩呀

1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于光学正交解调的相干零差多普勒测速激光雷达系统.pdf
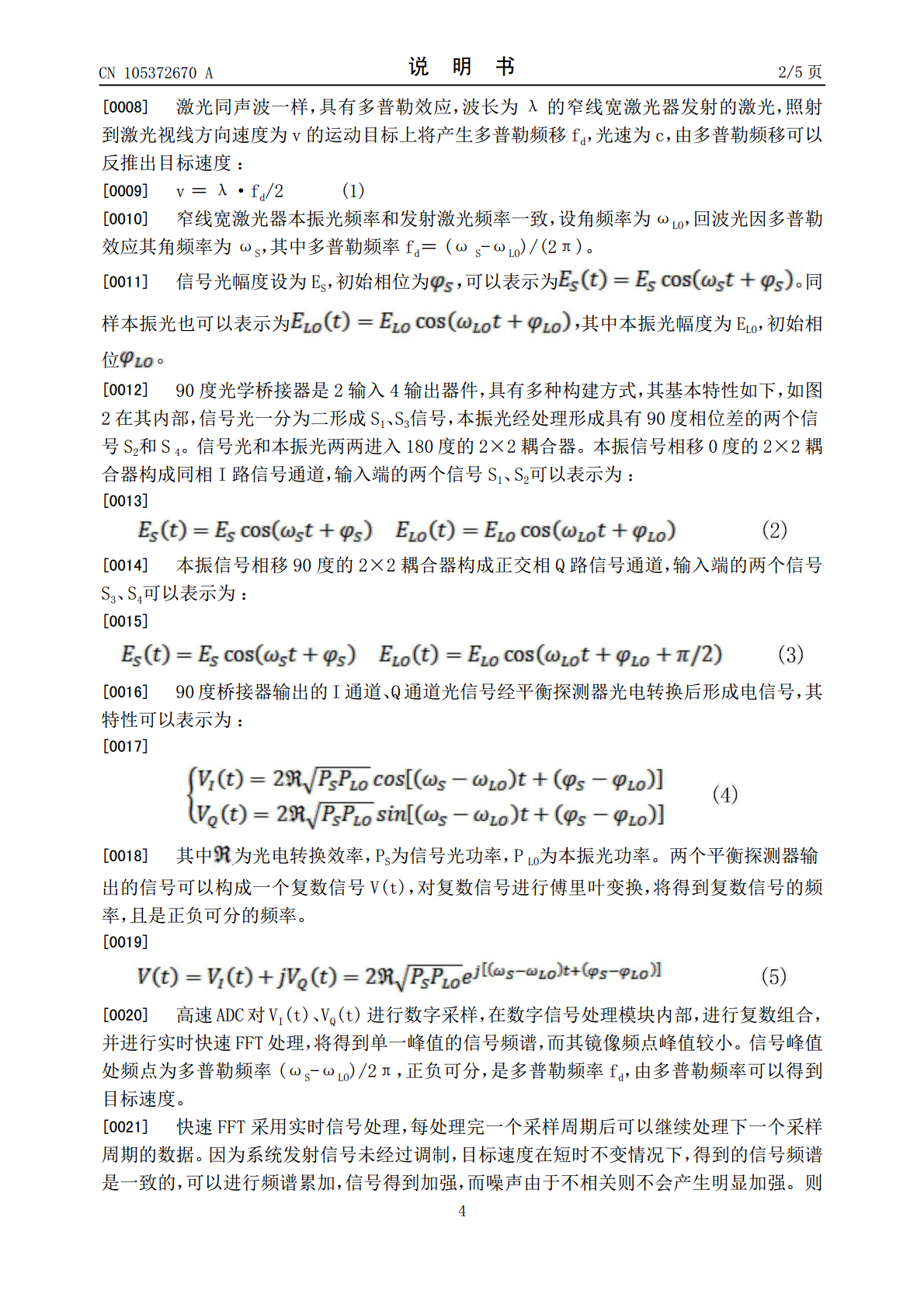
本发明公开了一种基于光学正交解调的相干零差多普勒测速激光雷达系统,它应用于相干激光雷达系统。本发明包括同轴收发望远镜、光纤环形器、发射光开关、接收光开关、窄线宽激光器、90度光学桥接器、平衡探测器、高数ADC、数字信号处理模块。本发明的相干零差多普勒测速激光雷达系统,基于光学正交解调直接得到回波信号频率和本振光频率的差值大小及方向,得到多个方向分时的目标速度大小和方向。

基于光学正交解调的相干零差多普勒测速激光雷达系统.pdf
本发明公开了一种基于光学正交解调的相干零差多普勒测速激光雷达系统,它应用于相干激光雷达系统。本发明包括同轴收发望远镜、光纤环形器、发射光开关、接收光开关、窄线宽激光器、90度光学桥接器、平衡探测器、高数ADC、数字信号处理模块。本发明的相干零差多普勒测速激光雷达系统,基于光学正交解调直接得到回波信号频率和本振光频率的差值大小及方向,得到多个方向分时的目标速度大小和方向。
光学正交解调的相干零差测速激光雷达的数据处理方法.pdf
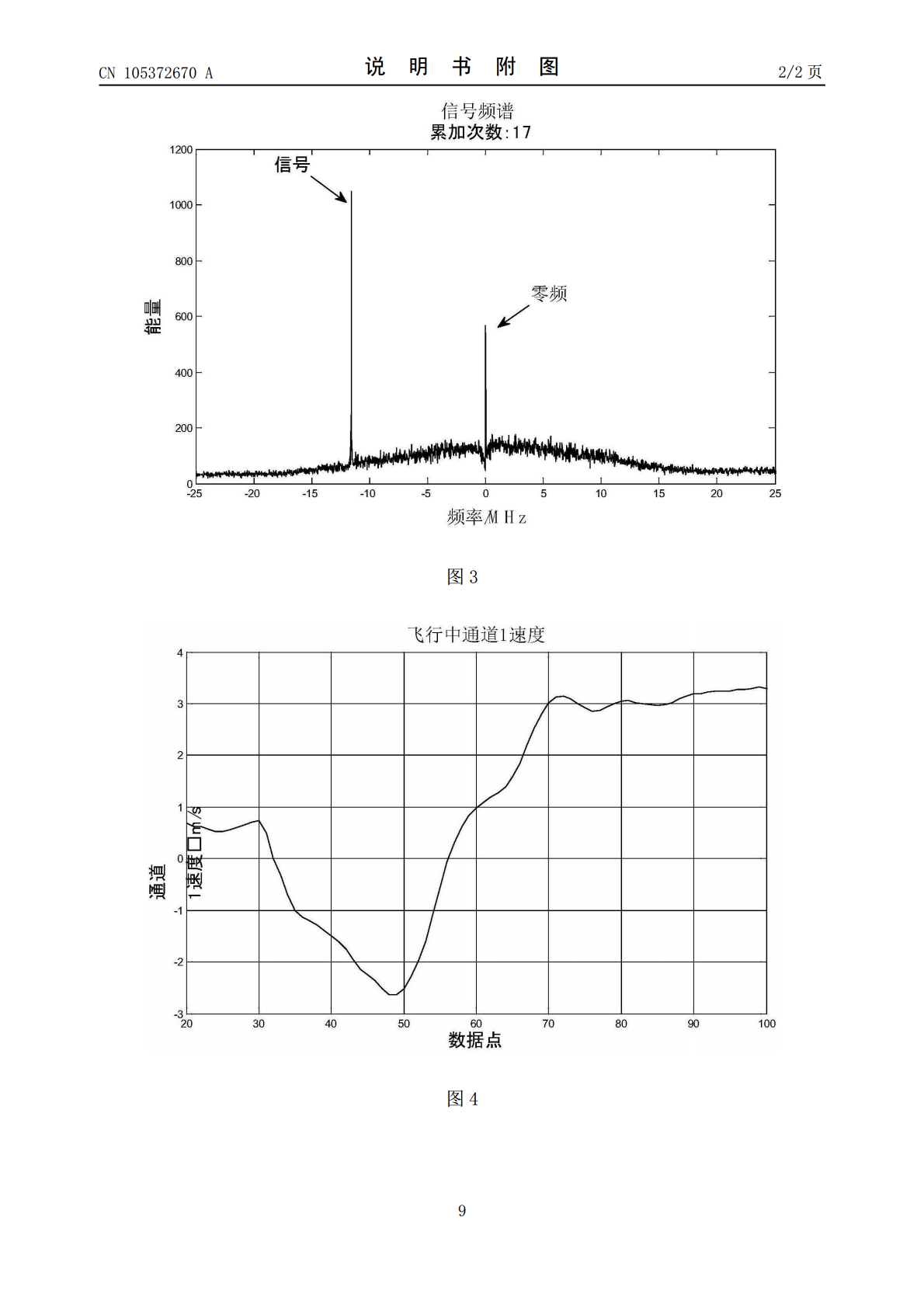
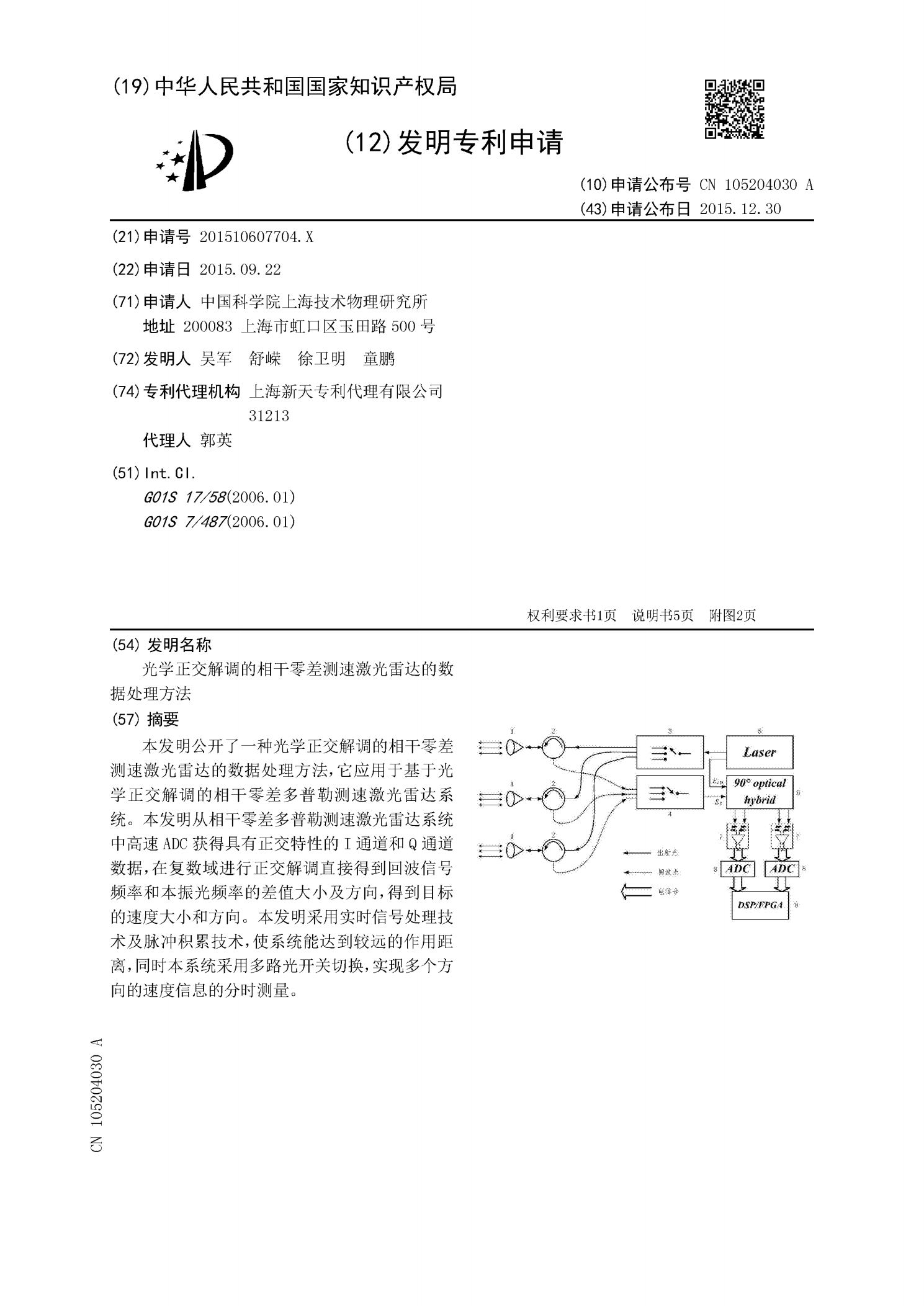
本发明公开了一种光学正交解调的相干零差测速激光雷达的数据处理方法,它应用于基于光学正交解调的相干零差多普勒测速激光雷达系统。本发明从相干零差多普勒测速激光雷达系统中高速ADC获得具有正交特性的I通道和Q通道数据,在复数域进行正交解调直接得到回波信号频率和本振光频率的差值大小及方向,得到目标的速度大小和方向。本发明采用实时信号处理技术及脉冲积累技术,使系统能达到较远的作用距离,同时本系统采用多路光开关切换,实现多个方向的速度信息的分时测量。

零差相干激光通信系统中多普勒频移的补偿方法.pdf
本发明公开了零差相干激光通信系统中多普勒频移的补偿方法,涉及空间激光通信零差相干探测技术领域,包括以下步骤:S1,当发生多普勒频移漂移时,将信号光和本振光进行处理得到中低频的漂移频差量信号;S2,通过现场可编程门阵列将中低频的漂移频差量信号转换为数模输出量,将处理后的数模输出量输入至本振激光器中控制其压电陶瓷柱伸缩实现移频;S3,压电陶瓷柱移频范围位于移频极限区间时,现场可编程门阵列通过解耦切换控制通信模块改变本振激光器的温度开启温度移频,减小高精度数模转换器的输入量,将压电陶瓷柱移频量由温度移频量替代,
用于提高激光多普勒相干测速系统信噪比的装置及方法.pdf
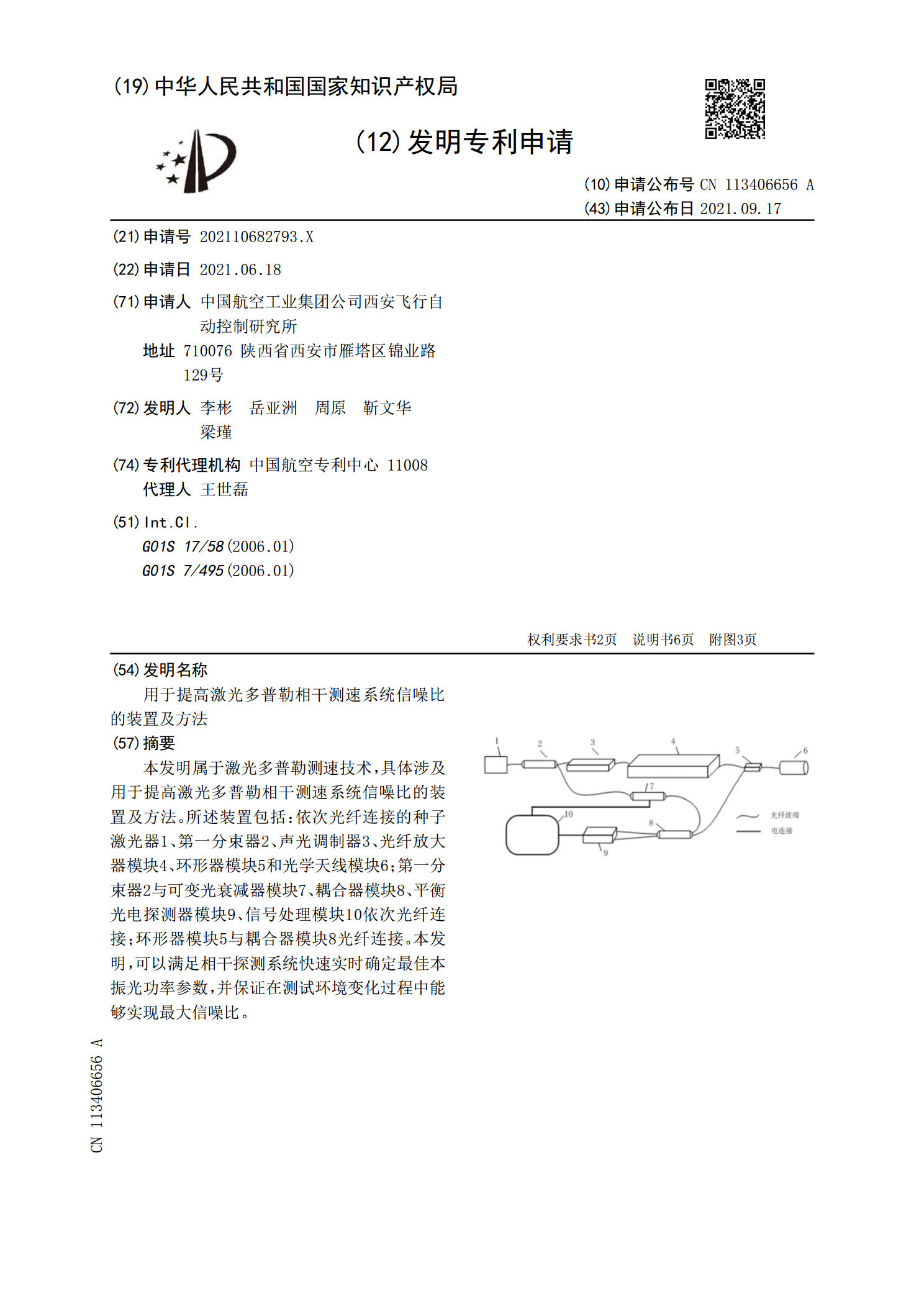
本发明属于激光多普勒测速技术,具体涉及用于提高激光多普勒相干测速系统信噪比的装置及方法。所述装置包括:依次光纤连接的种子激光器1、第一分束器2、声光调制器3、光纤放大器模块4、环形器模块5和光学天线模块6;第一分束器2与可变光衰减器模块7、耦合器模块8、平衡光电探测器模块9、信号处理模块10依次光纤连接;环形器模块5与耦合器模块8光纤连接。本发明,可以满足相干探测系统快速实时确定最佳本振光功率参数,并保证在测试环境变化过程中能够实现最大信噪比。