
变PRF条件下雷达目标微动特征提取的方法.pdf

猫巷****熙柔


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

变PRF条件下雷达目标微动特征提取的方法.pdf
本发明提供了一种变PRF条件下雷达目标微动特征提取的方法。在该方法中,利用变PRF跟踪脉冲消除多普勒信号频域混叠现象,根据微多普勒信号结构特征构建微多普勒信号原子集以及PRF自适应调整的方法实现了微动特征提取。本发明无需再额外分配长时间高PRF的固定雷达资源进行传统的微动特征提取,能够有效提高雷达的工作效率。

一种基于多通道雷达的旋转目标微动特征提取方法和装置.pdf
本申请涉及一种基于多通道雷达的旋转目标微动特征提取方法和装置。所述方法包括:获取多通道雷达在测量旋转目标时多个相邻通道接收的回波数据,对回波数据进行干涉处理得到对应的干涉数据。通过时频分析得到干涉数据的微多普勒曲线,对微多普勒曲线对应的速度曲线进行积分,得到对应的距离差数据。根据多通道雷达和旋转目标的位置关系以及得到的距离差数据,得到旋转目标在相邻通道对应的基线方向的微动特征。上述方法利用多通道雷达的多视角特性,基于干涉处理与时频分析相结合的方法提取旋转目标的微动特征,避免了从干涉回波数据中提取干涉相位和

一种穿墙雷达微动目标检测方法.pdf
本发明公开了一种穿墙雷达微动目标检测方法,属于雷达检测领域、穿墙雷达检测领域,本发明的方法步骤如下:将采集的中频回波信号进行脉冲压缩处理;根据微动目标的多普勒频移特性设计一窄带滤波器对带外杂波进行抑制;对杂波抑制处理后的信号进行相干积累;将上述处理后的信号进行恒虚警检测;其中脉冲压缩提高信噪比和距离精度;杂波抑制可有效抑制障碍物后方的强杂波;本方法在对微动目标的微多普勒特性的分析的基础上,有针对性地对墙后微动目标的微弱回波进行滤波、放大、提取等处理,最后实现微动目标的有效检测。
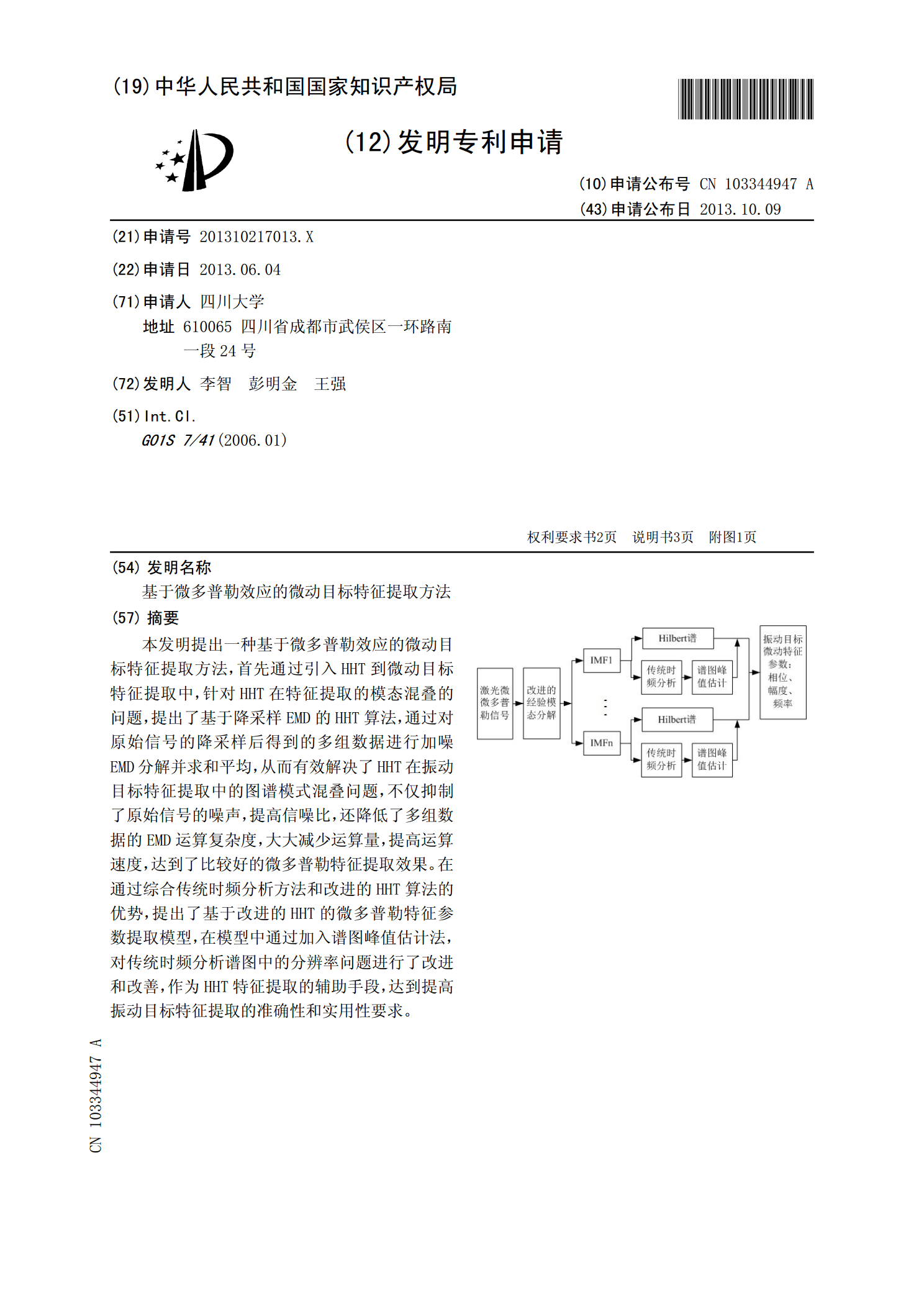
基于微多普勒效应的微动目标特征提取方法.pdf
本发明提出一种基于微多普勒效应的微动目标特征提取方法,首先通过引入HHT到微动目标特征提取中,针对HHT在特征提取的模态混叠的问题,提出了基于降采样EMD的HHT算法,通过对原始信号的降采样后得到的多组数据进行加噪EMD分解并求和平均,从而有效解决了HHT在振动目标特征提取中的图谱模式混叠问题,不仅抑制了原始信号的噪声,提高信噪比,还降低了多组数据的EMD运算复杂度,大大减少运算量,提高运算速度,达到了比较好的微多普勒特征提取效果。在通过综合传统时频分析方法和改进的HHT算法的优势,提出了基于改进的HHT
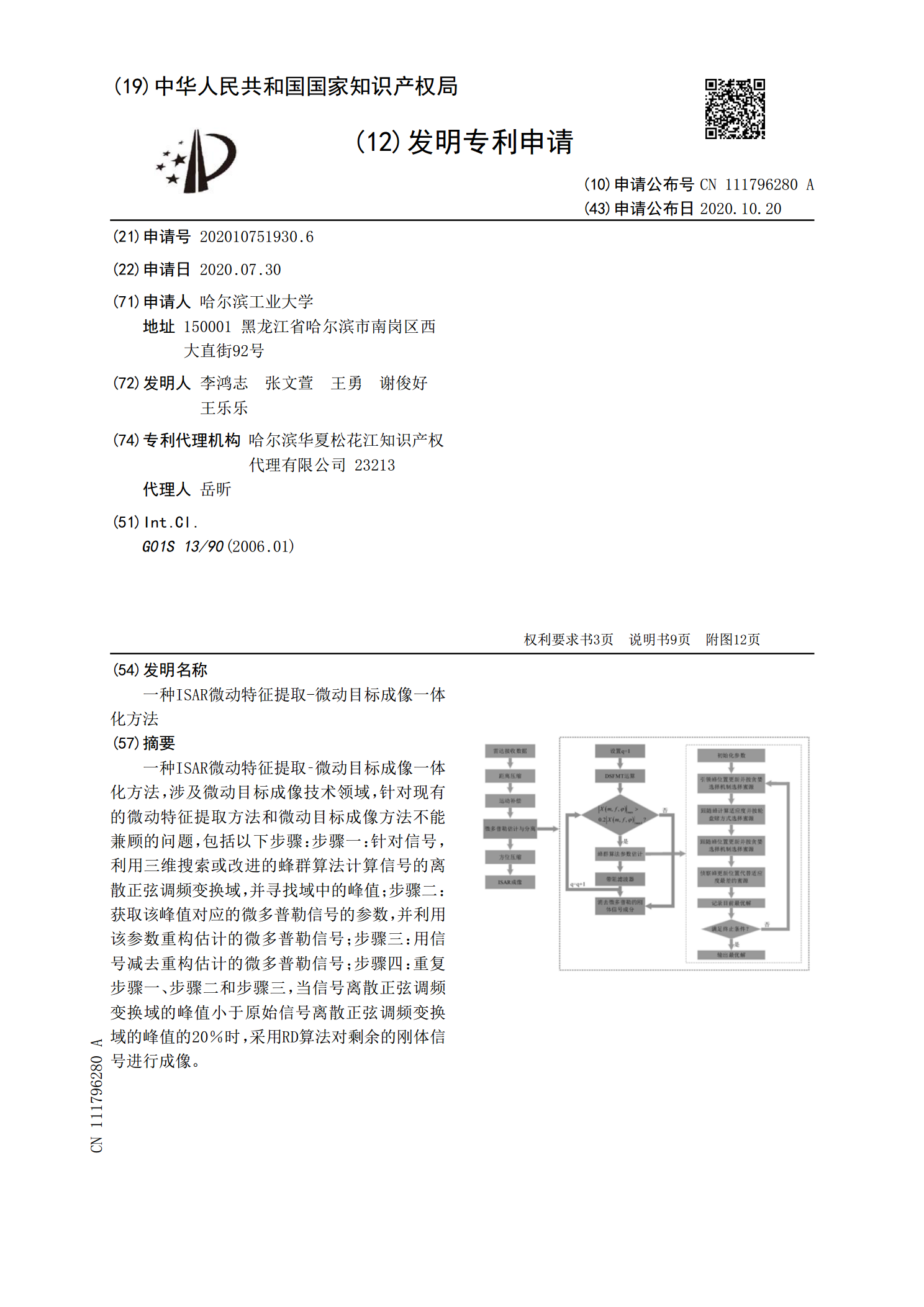
一种ISAR微动特征提取-微动目标成像一体化方法.pdf
一种ISAR微动特征提取‑微动目标成像一体化方法,涉及微动目标成像技术领域,针对现有的微动特征提取方法和微动目标成像方法不能兼顾的问题,包括以下步骤:步骤一:针对信号,利用三维搜索或改进的蜂群算法计算信号的离散正弦调频变换域,并寻找域中的峰值;步骤二:获取该峰值对应的微多普勒信号的参数,并利用该参数重构估计的微多普勒信号;步骤三:用信号减去重构估计的微多普勒信号;步骤四:重复步骤一、步骤二和步骤三,当信号离散正弦调频变换域的峰值小于原始信号离散正弦调频变换域的峰值的20%时,采用RD算法对剩余的刚体信号进