
基于雷达幅度和多普勒频率估计的空时自适应处理方法.pdf

俊凤****bb


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于雷达幅度和多普勒频率估计的空时自适应处理方法.pdf
本发明公开了一种基于雷达幅度和多普勒频率估计的空时自适应处理方法,其思路为:确定机载雷达,所述机载雷达发射脉冲信号并接收检测范围内的雷达回波信号,计算得到N×M×L维雷达回波信号矩阵,并计算N个阵元中L个距离单元对应D个多普勒通道处功率值的D×L维雷达回波信号矩阵P,得到K个目标,进而得到K个目标的功率谱对应的扩散距离单元范围,初始化k,并计算第k个目标的功率谱所在扩散距离单元扩散范围L
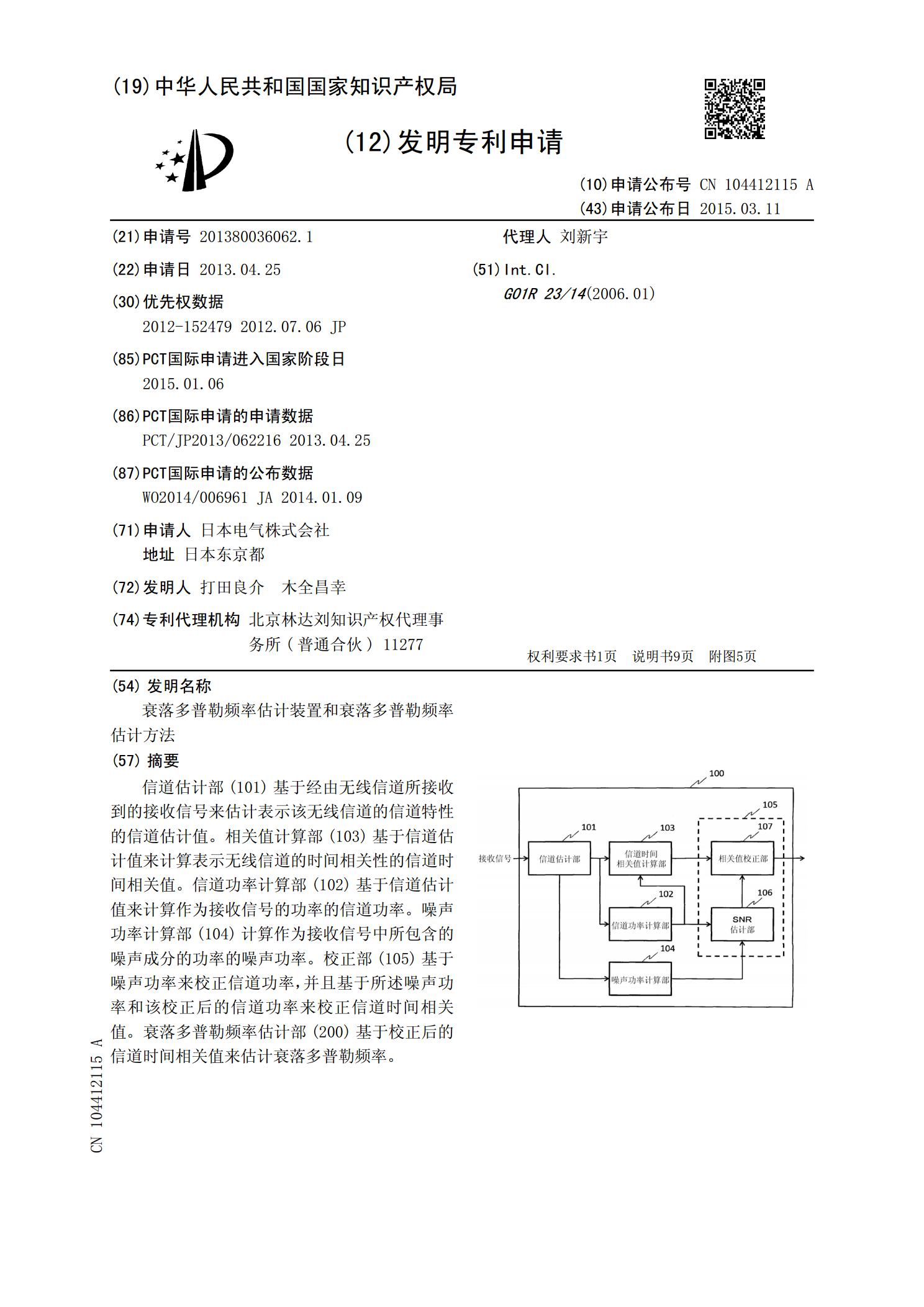
衰落多普勒频率估计装置和衰落多普勒频率估计方法.pdf
信道估计部(101)基于经由无线信道所接收到的接收信号来估计表示该无线信道的信道特性的信道估计值。相关值计算部(103)基于信道估计值来计算表示无线信道的时间相关性的信道时间相关值。信道功率计算部(102)基于信道估计值来计算作为接收信号的功率的信道功率。噪声功率计算部(104)计算作为接收信号中所包含的噪声成分的功率的噪声功率。校正部(105)基于噪声功率来校正信道功率,并且基于所述噪声功率和该校正后的信道功率来校正信道时间相关值。衰落多普勒频率估计部(200)基于校正后的信道时间相关值来估计衰落多普勒

基于空时自适应处理雷达的和差波束形成方法.pdf
本发明公开一种基于空时自适应处理雷达的和差波束形成方法,主要解决现有技术主瓣响应失真的问题。其实现步骤是:1.在信号处理机中输入空时自适应处理雷达的采样数据;2.根据采样数据估计得到采样协方差矩阵;3.设计五个约束点的角度和多普勒;4.根据采样协方差矩阵和五个约束点,设计和波束权矢量;5.根据采样协方差矩阵和五个约束点,设计空域差波束权矢量;6.根据采样协方差矩阵和五个约束点,设计时域差波束权矢量;7.根据采样数据和波束权矢量,得到和波束、空域差波束和时域差波束的输出信号。本发明通过幅度相位联合约束、导数

基于先验知识的雷达杂波空时自适应处理方法.pdf
本发明公开了一种基于先验知识的雷达杂波空时自适应处理方法,其主要思路为:确定机载雷达,所述机载雷达包含N个阵元,每个阵元包含L个距离单元,每个距离单元包含K个相参脉冲,并计算机载雷达N个阵元在第l个距离单元处的多普勒域数据矢量,依次计算第n个阵元中第l个距离单元、第k个多普勒单元的加权系数α

基于雷达高分辨距离像的旋转微多普勒频率估计方法.pdf
本发明一种基于雷达高分辨距离像的旋转微多普勒频率估计方法,本发明包括下述步骤:第一步,获取雷达目标高分辨距离像,将各次回波对应的高分辨距离像按行排列构建成二维矩阵;第二步,按行计算高分辨距离像矩阵对应的循环相关系数矩阵;第三步,计算平均循环相关系数;第四步,搜索平均循环相关系数的峰值并求平均值,对平均值取倒数可估计出旋转微多普勒频率。本发明提出的方法不仅能够精确估计旋转微动多普勒频率,而且对目标高分辨距离像不连续等不理想情况具有鲁棒性,且估计结果计算耗时较少。