
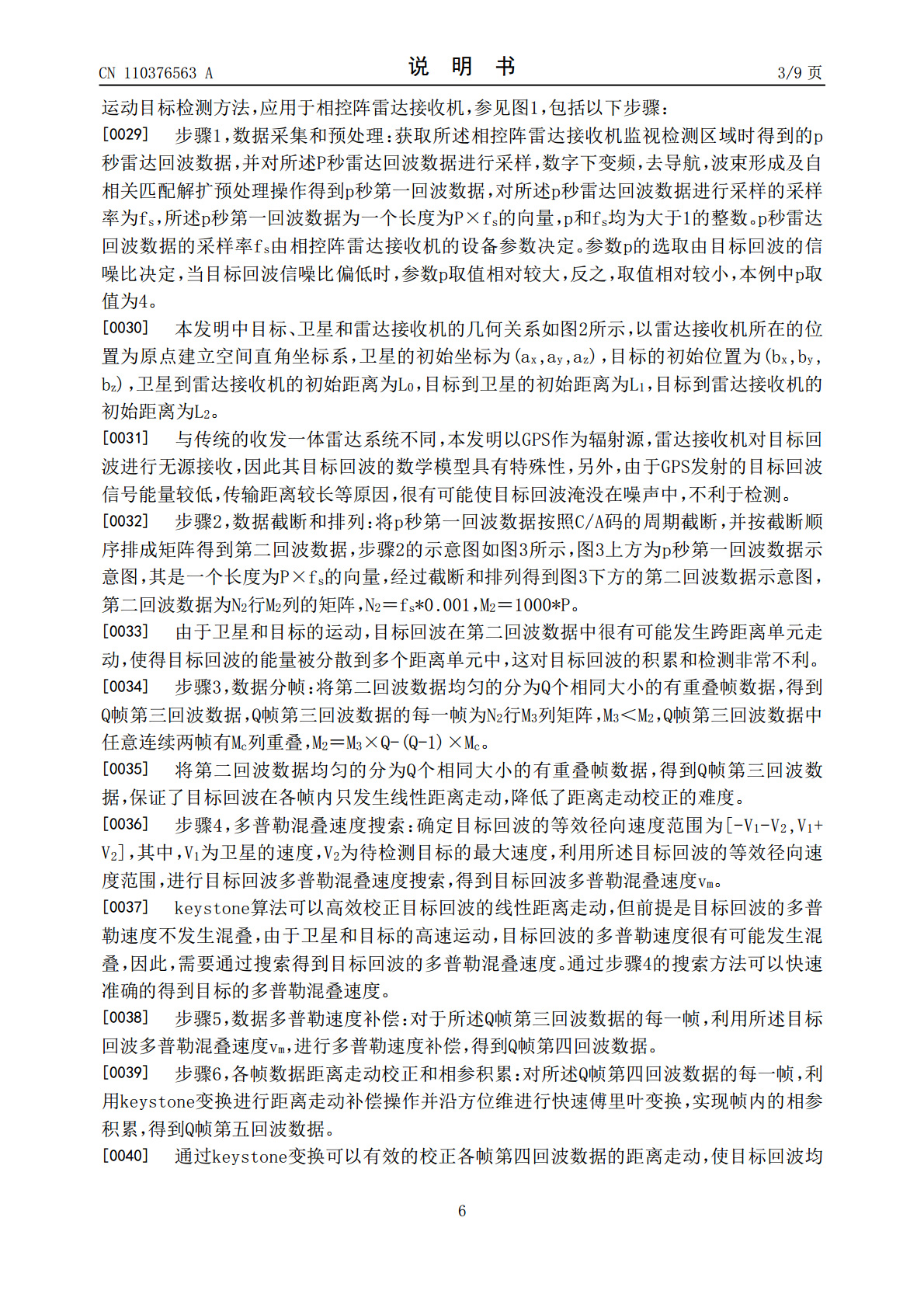
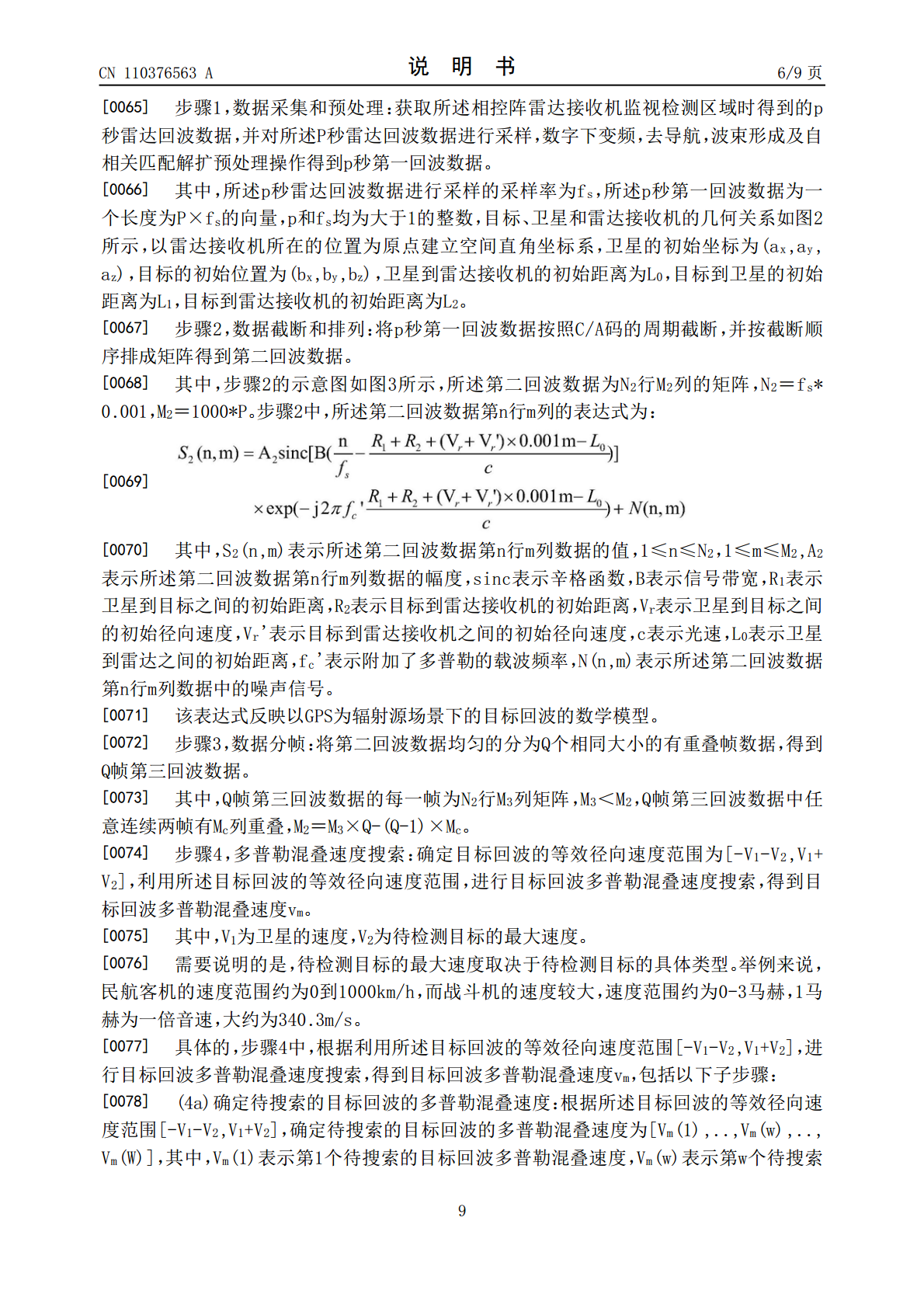
基于GPS辐射源的雷达运动目标检测方法.pdf

是你****芹呀


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于GPS辐射源的雷达运动目标检测方法.pdf
本发明公开了基于GPS辐射源的雷达运动目标检测方法,解决了GPS作为辐射源,目标回波信噪比低的技术问题,实现步骤包括:数据采集和预处理;数据截断和排列,构建GPS信号作为辐射源场景下,匀速运动目标回波的数学模型;数据分帧;多普勒混叠速度搜索;数据多普勒速度补偿;各帧数据距离走动校正和相参积累;各帧数据完成检测。本发明根据卫星,目标和雷达接收机的几何关系,推导出了GPS信号作为辐射源场景下,匀速运动目标回波的数学模型,并根据该模型提出基于GPS辐射源的雷达运动目标检测方法,该方法在目标回波信噪比较低情况下,
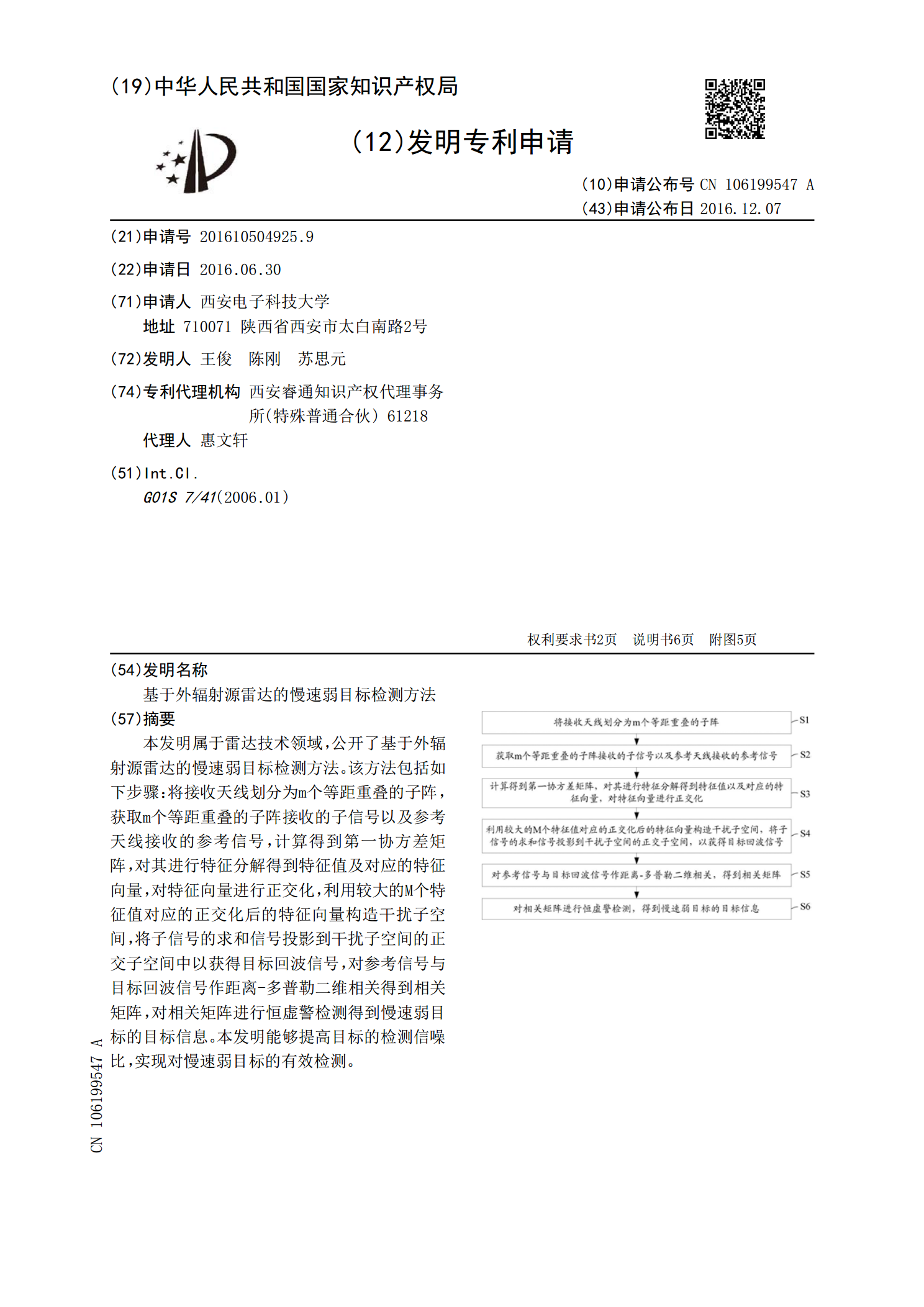
基于外辐射源雷达的慢速弱目标检测方法.pdf
本发明属于雷达技术领域,公开了基于外辐射源雷达的慢速弱目标检测方法。该方法包括如下步骤:将接收天线划分为m个等距重叠的子阵,获取m个等距重叠的子阵接收的子信号以及参考天线接收的参考信号,计算得到第一协方差矩阵,对其进行特征分解得到特征值及对应的特征向量,对特征向量进行正交化,利用较大的M个特征值对应的正交化后的特征向量构造干扰子空间,将子信号的求和信号投影到干扰子空间的正交子空间中以获得目标回波信号,对参考信号与目标回波信号作距离‑多普勒二维相关得到相关矩阵,对相关矩阵进行恒虚警检测得到慢速弱目标的目标信

基于北斗卫星辐射源的双基地雷达海面运动目标检测方法.pdf
本发明公开了一种基于北斗卫星辐射源的双基地雷达海面运动目标检测方法,其对长观测时间下的回波信号采用对称二阶Keystone变换进行距离徙动校正,并对整个观测时间下的回波信号进行统一的去斜处理,接着进行分帧处理,帧内信号进行相干积累,帧间信号进行非相干积累,可以有效地解决北斗卫星作为外辐射源目标回波信噪比低的问题。由于采用对称二阶Keystone变换,可以在未知多普勒参数的情况下同时去除距离走动和距离弯曲,更好地实现距离徙动校正;并且由于能量积累处理时,帧内信号只需进行相加运算,帧间信号不需进行多普勒质心补

以GPS导航卫星为外辐射源的无源雷达微弱目标检测方法.pdf
本发明提供的是一种以GPS导航卫星为外辐射源的无源雷达微弱目标检测方法。在参考通道中采用标准的GPS接收机,接收到的信号作为参考信号,对其进行提纯处理;在雷达目标回波通道中,首先对其进行放大和滤波,然后下变频到中频进行处理,去除GPS信号中携带的导航信息,利用LS-CLEAN方法进行直达波和杂波抑制,对抑制后的信号与参考信号进行匹配滤波,在匹配滤波器的输出端首先进行多普勒补偿,再对强目标旁瓣对微弱目标的遮蔽作用进行抑制,最后进行相干累积、恒虚警处理。能有效地抑制直达波干扰、多径干扰、杂波干扰和强目标回波旁

基于波形认知的调频广播外辐射源雷达目标检测方法.pdf
本发明公开了一种基于波形认知的调频广播外辐射源雷达目标检测方法,首先在参考通道中恢复不同电台的直达波信号;在参考通道中进行照射源波形认知处理,选择照射源;在监测通道中针对接收阵列接收的信号利用自适应对消法抑制直达波和多径杂波;对对消剩余信号与参考通道中选择的照射源的直达波信号进行距离多普勒互相关计算,实现调频广播信号的筛选进行目标检测,解决部分调频广播信号带宽不适合目标检测的技术问题。