
一种星载合成孔径雷达实时统一成像方法.pdf

一吃****新冬


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种星载合成孔径雷达实时统一成像方法.pdf
本发明属于雷达技术领域,具体涉及一种星载合成孔径雷达实时统一成像方法,根据合成孔径雷达SAR的回波信号、得到子孔径回波信号;根据多普勒中心补偿函数H
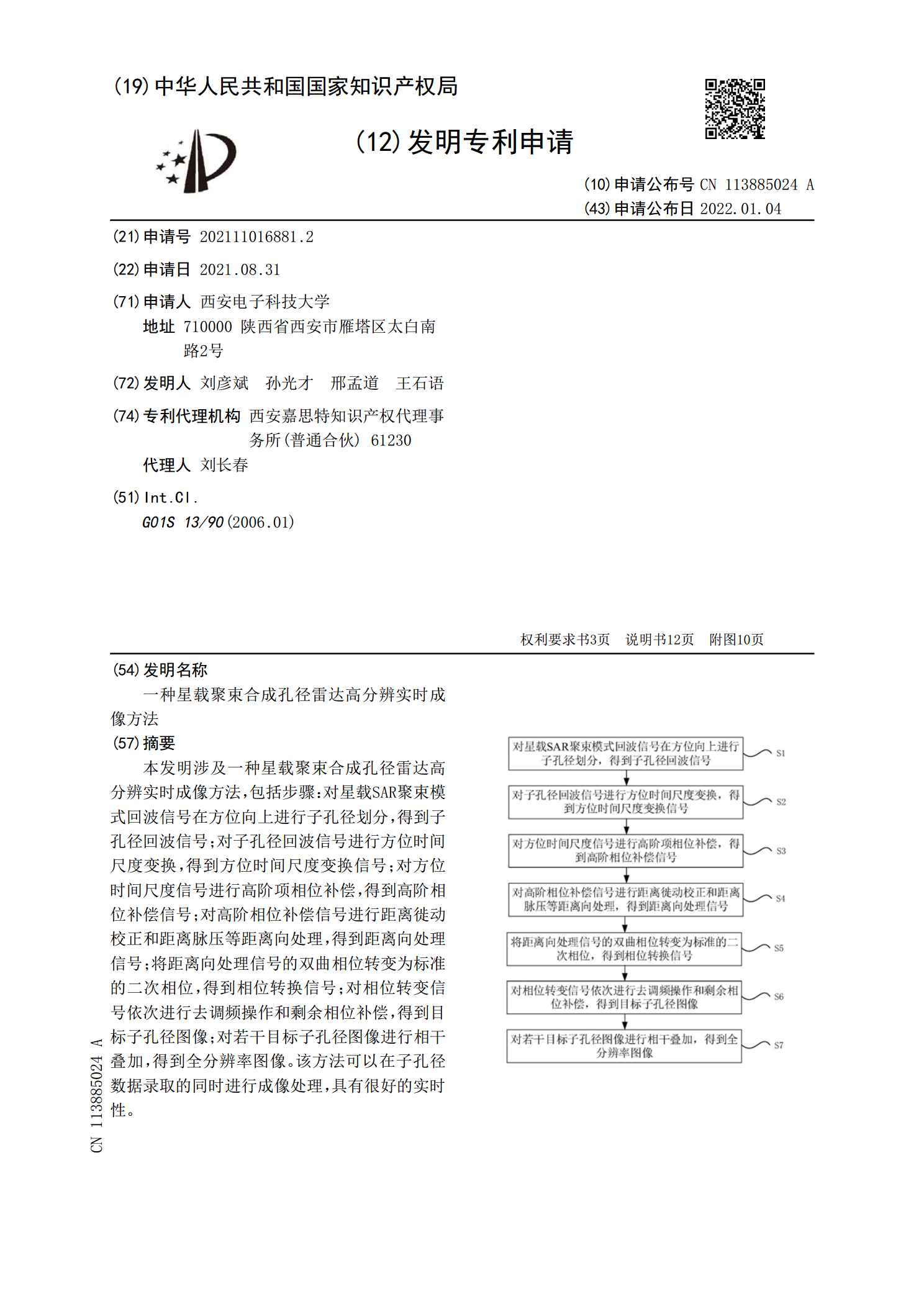
一种星载聚束合成孔径雷达高分辨实时成像方法.pdf
本发明涉及一种星载聚束合成孔径雷达高分辨实时成像方法,包括步骤:对星载SAR聚束模式回波信号在方位向上进行子孔径划分,得到子孔径回波信号;对子孔径回波信号进行方位时间尺度变换,得到方位时间尺度变换信号;对方位时间尺度信号进行高阶项相位补偿,得到高阶相位补偿信号;对高阶相位补偿信号进行距离徙动校正和距离脉压等距离向处理,得到距离向处理信号;将距离向处理信号的双曲相位转变为标准的二次相位,得到相位转换信号;对相位转变信号依次进行去调频操作和剩余相位补偿,得到目标子孔径图像;对若干目标子孔径图像进行相干叠加,得
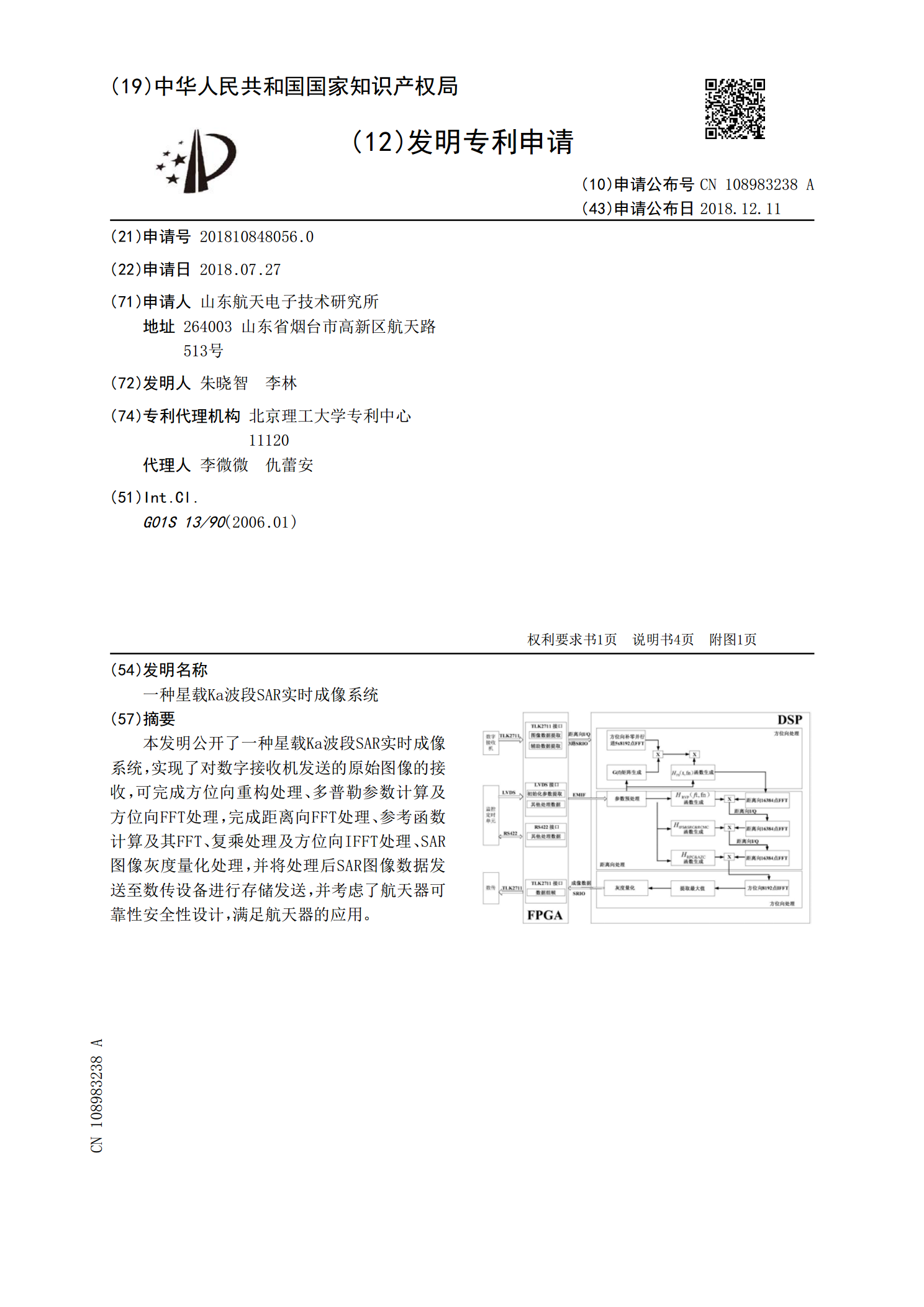
一种星载Ka波段SAR实时成像系统.pdf
本发明公开了一种星载Ka波段SAR实时成像系统,实现了对数字接收机发送的原始图像的接收,可完成方位向重构处理、多普勒参数计算及方位向FFT处理,完成距离向FFT处理、参考函数计算及其FFT、复乘处理及方位向IFFT处理、SAR图像灰度量化处理,并将处理后SAR图像数据发送至数传设备进行存储发送,并考虑了航天器可靠性安全性设计,满足航天器的应用。
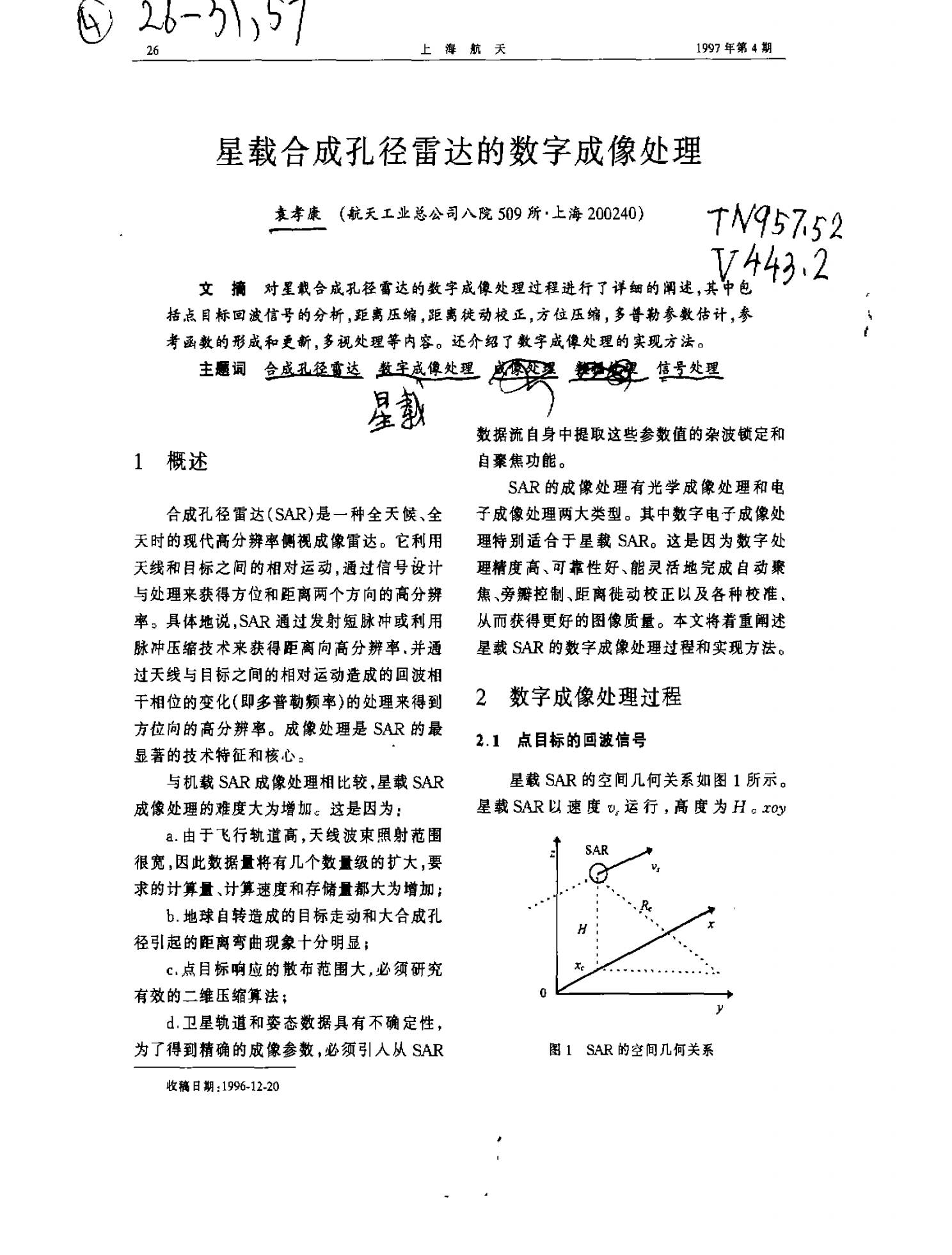
星载合成孔径雷达的数学成像处理.pdf
一上海航天年第期
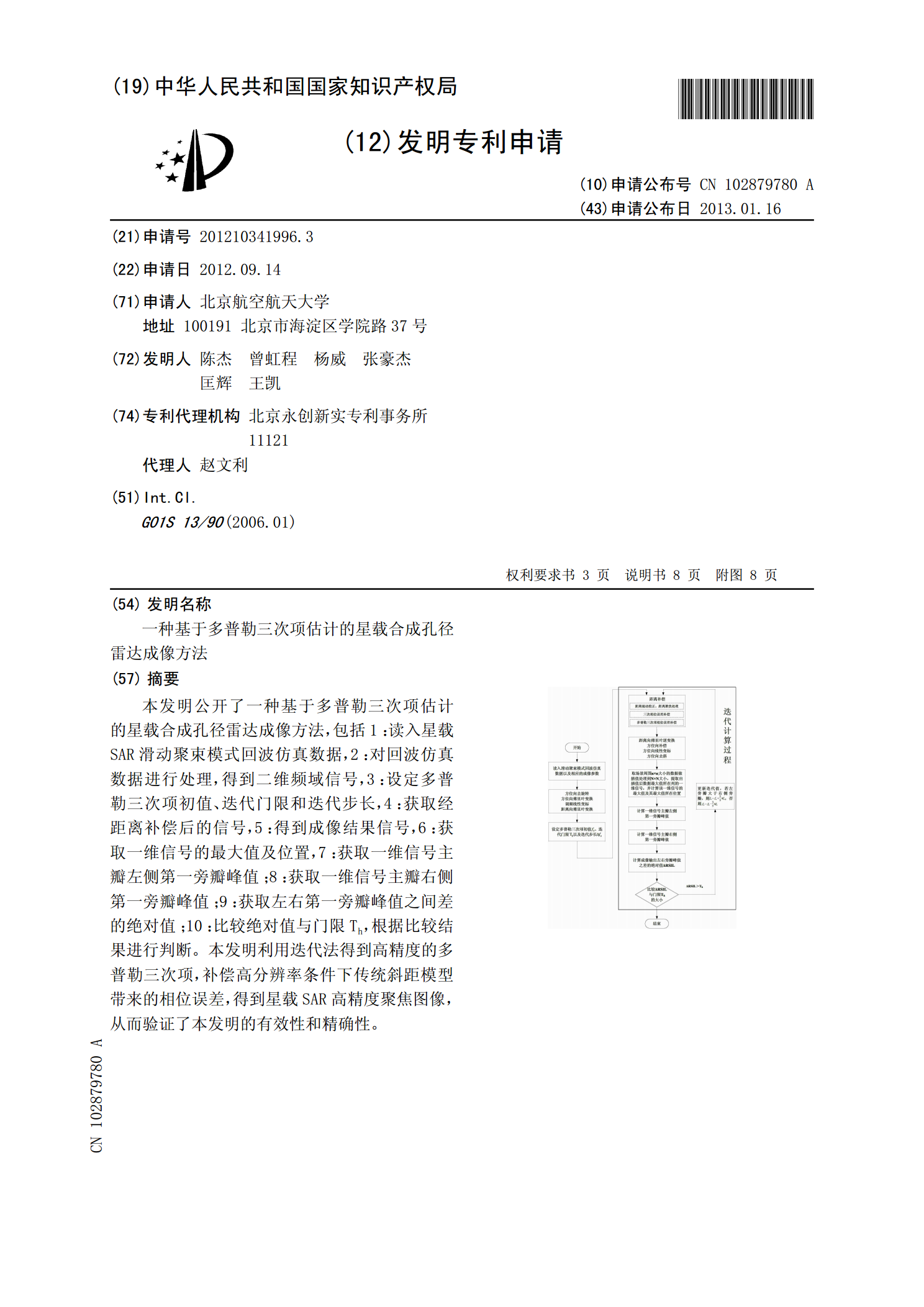
一种基于多普勒三次项估计的星载合成孔径雷达成像方法.pdf
本发明公开了一种基于多普勒三次项估计的星载合成孔径雷达成像方法,包括1:读入星载SAR滑动聚束模式回波仿真数据,2:对回波仿真数据进行处理,得到二维频域信号,3:设定多普勒三次项初值、迭代门限和迭代步长,4:获取经距离补偿后的信号,5:得到成像结果信号,6:获取一维信号的最大值及位置,7:获取一维信号主瓣左侧第一旁瓣峰值;8:获取一维信号主瓣右侧第一旁瓣峰值;9:获取左右第一旁瓣峰值之间差的绝对值;10:比较绝对值与门限Th,根据比较结果进行判断。本发明利用迭代法得到高精度的多普勒三次项,补偿高分辨率条件