
人体目标微多普勒频率估计方法.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

人体目标微多普勒频率估计方法.pdf
本发明公开了一种人体目标微多普勒频率估计方法,包括获取多普勒雷达的回波信号时频分布数据;采用Viterbi算法搜索的初始路径计算一至三阶指数平滑值;计算预测系数;构建Viterbi算法的惩罚函数;构建人体目标微多普勒频率估计模型;完成人体目标微多普勒频率估计。本发明基于三次指数平滑预测得到最优路径的非线性变化趋势,并以此构建新的惩罚函数对Viterbi算法进行改进,提高了传统惩罚函数的路径识别能力;同时动态调整候选路径的搜索范围,不需要在TF平面上进行全局搜索,提高了算法的计算效率;因此本发明方法能够有效

基于扩展贝塞尔模型的人体目标微多普勒频率估计方法.pdf
本发明公开了一种基于扩展贝塞尔模型的人体目标微多普勒频率估计方法,属于微多普勒频率估计技术领域,本发明提供一种基于扩展贝塞尔模型的人体目标微多普勒频率估计方法,通过提取小腿微多普勒频率,然后进行分段拟合,先使用贝塞尔模型确定最优控制点,在不改变并且不增加控制点的基础上引入参数,通过基于扩展贝塞尔模型的霍夫变换频率估计算法完成对雷达回波信号的目标分量分离和小腿多普勒频率特征的精确估计;本发明提出一种精确估计特定目标散射部分微多普勒频率的新方法,在实时人体传感应用中具有很好的应用前景。
衰落多普勒频率估计装置和衰落多普勒频率估计方法.pdf
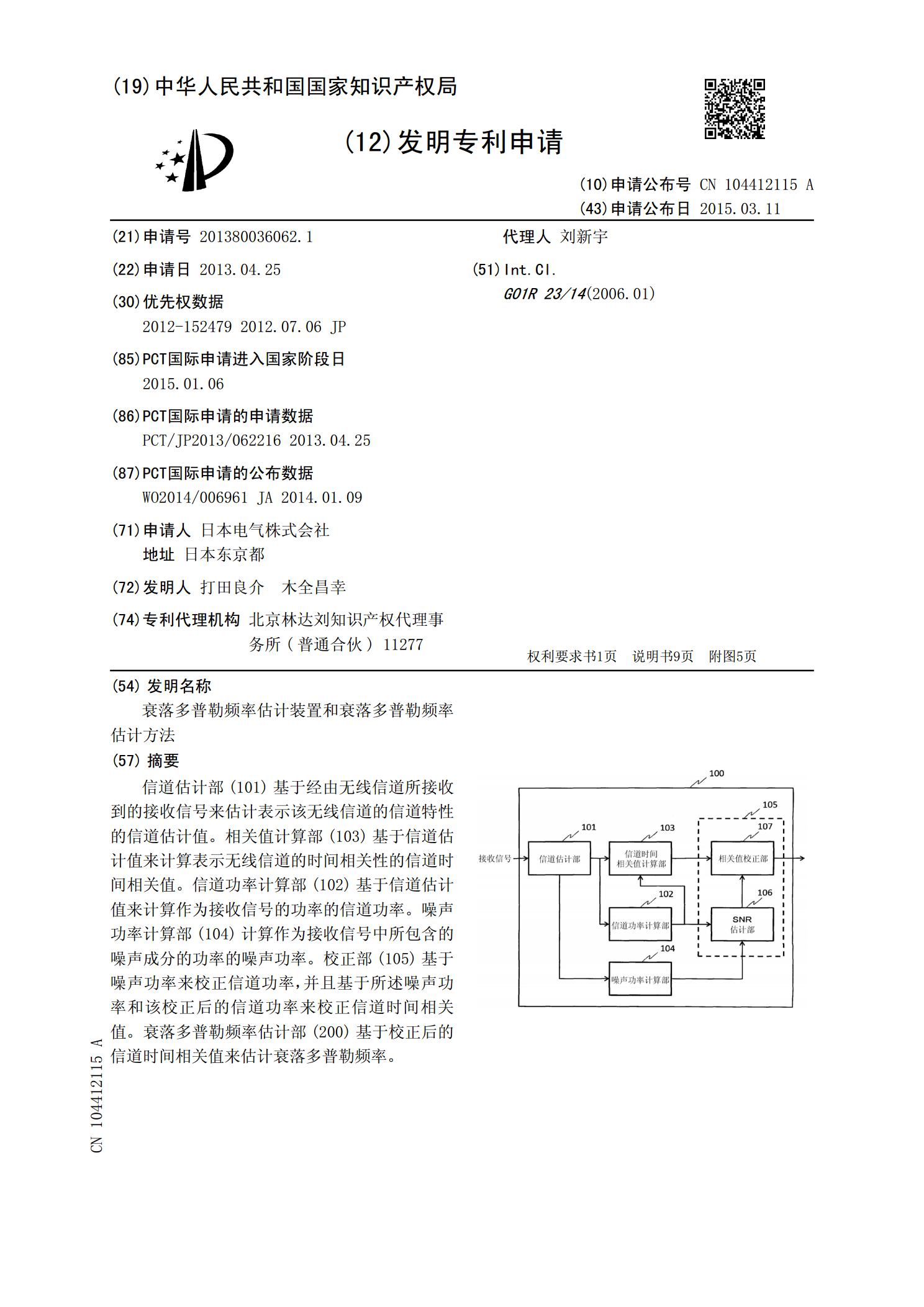
信道估计部(101)基于经由无线信道所接收到的接收信号来估计表示该无线信道的信道特性的信道估计值。相关值计算部(103)基于信道估计值来计算表示无线信道的时间相关性的信道时间相关值。信道功率计算部(102)基于信道估计值来计算作为接收信号的功率的信道功率。噪声功率计算部(104)计算作为接收信号中所包含的噪声成分的功率的噪声功率。校正部(105)基于噪声功率来校正信道功率,并且基于所述噪声功率和该校正后的信道功率来校正信道时间相关值。衰落多普勒频率估计部(200)基于校正后的信道时间相关值来估计衰落多普勒

基于微多普勒频率的进动锥体目标的几何参数估计方法.pdf
本发明公开了一种基于微多普勒频率的进动锥体目标的几何参数估计方法。对圆锥弹头目标进行建模,计算目标在全姿态角下的回波数据;对得到的全姿态角下的回波数据采用插值拟合的方法构造出进动锥体目标的回波电场数值;对回波电场数值进行短时傅里叶变换,得到进动锥体目标的时频分布结果;分别提取进动锥体目标中的时频分布结果中的锥顶时频脊线和锥底时频脊线;通过进动锥体目标的锥顶和锥底微多普勒频率表达式,推导出待估计参数质心到锥顶距离L、质心到锥底中心的距离h、锥底半径r和进动角θ的关系;通过数值关系匹配的方法估计进动角θ、质心

基于雷达高分辨距离像的旋转微多普勒频率估计方法.pdf
本发明一种基于雷达高分辨距离像的旋转微多普勒频率估计方法,本发明包括下述步骤:第一步,获取雷达目标高分辨距离像,将各次回波对应的高分辨距离像按行排列构建成二维矩阵;第二步,按行计算高分辨距离像矩阵对应的循环相关系数矩阵;第三步,计算平均循环相关系数;第四步,搜索平均循环相关系数的峰值并求平均值,对平均值取倒数可估计出旋转微多普勒频率。本发明提出的方法不仅能够精确估计旋转微动多普勒频率,而且对目标高分辨距离像不连续等不理想情况具有鲁棒性,且估计结果计算耗时较少。