
一种基于多通道雷达的旋转目标微动特征提取方法和装置.pdf

睿德****找我

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多通道雷达的旋转目标微动特征提取方法和装置.pdf
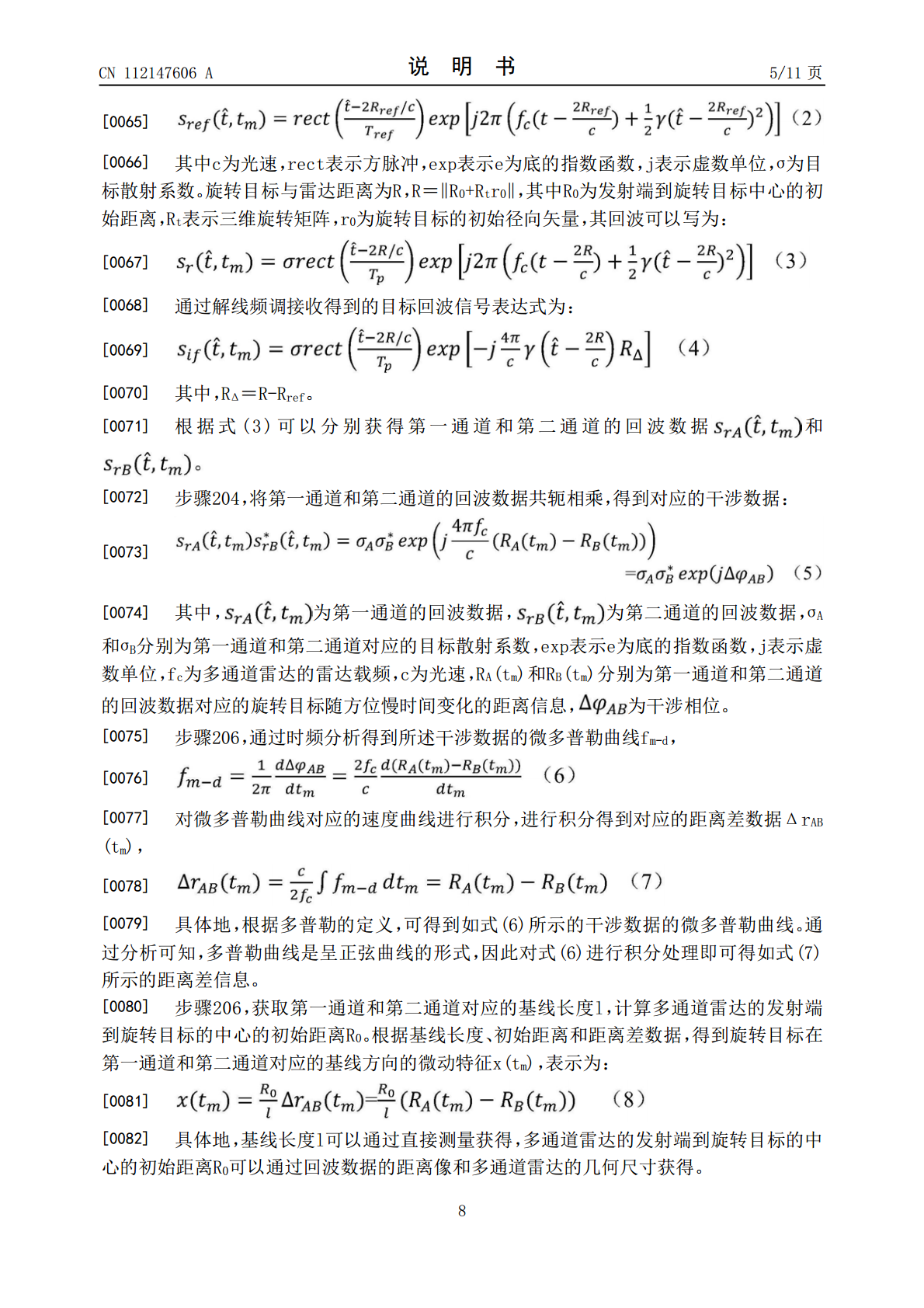
本申请涉及一种基于多通道雷达的旋转目标微动特征提取方法和装置。所述方法包括:获取多通道雷达在测量旋转目标时多个相邻通道接收的回波数据,对回波数据进行干涉处理得到对应的干涉数据。通过时频分析得到干涉数据的微多普勒曲线,对微多普勒曲线对应的速度曲线进行积分,得到对应的距离差数据。根据多通道雷达和旋转目标的位置关系以及得到的距离差数据,得到旋转目标在相邻通道对应的基线方向的微动特征。上述方法利用多通道雷达的多视角特性,基于干涉处理与时频分析相结合的方法提取旋转目标的微动特征,避免了从干涉回波数据中提取干涉相位和
基于雷达情报的空情目标特征提取方法及装置.pdf
本发明公开一种基于雷达情报的空情目标特征提取方法及装置,包括:根据预警雷达探测空中目标的关注信息以及目标自身特征,以目标本质特征与活动规律分别建立目标基础特征模型和目标活动规律特征模型;根据所述目标基础特征模型和目标活动规律特征模型,建立目标基础特征数据库和目标活动规律特征数据库,作为空情目标特征数据的存储器;针对某一类型空情目标,在所述目标基础特征数据库中建立空情目标基础信息;并从已有的雷达情报数据中筛选获得目标雷达情报数据集,根据所述目标活动规律特征模型,逐项分析提取目标活动规律特征模型的特征信息,并

变PRF条件下雷达目标微动特征提取的方法.pdf
本发明提供了一种变PRF条件下雷达目标微动特征提取的方法。在该方法中,利用变PRF跟踪脉冲消除多普勒信号频域混叠现象,根据微多普勒信号结构特征构建微多普勒信号原子集以及PRF自适应调整的方法实现了微动特征提取。本发明无需再额外分配长时间高PRF的固定雷达资源进行传统的微动特征提取,能够有效提高雷达的工作效率。

一种穿墙雷达微动目标检测方法.pdf
本发明公开了一种穿墙雷达微动目标检测方法,属于雷达检测领域、穿墙雷达检测领域,本发明的方法步骤如下:将采集的中频回波信号进行脉冲压缩处理;根据微动目标的多普勒频移特性设计一窄带滤波器对带外杂波进行抑制;对杂波抑制处理后的信号进行相干积累;将上述处理后的信号进行恒虚警检测;其中脉冲压缩提高信噪比和距离精度;杂波抑制可有效抑制障碍物后方的强杂波;本方法在对微动目标的微多普勒特性的分析的基础上,有针对性地对墙后微动目标的微弱回波进行滤波、放大、提取等处理,最后实现微动目标的有效检测。
空间微动群目标多通道盲源分离方法.pdf
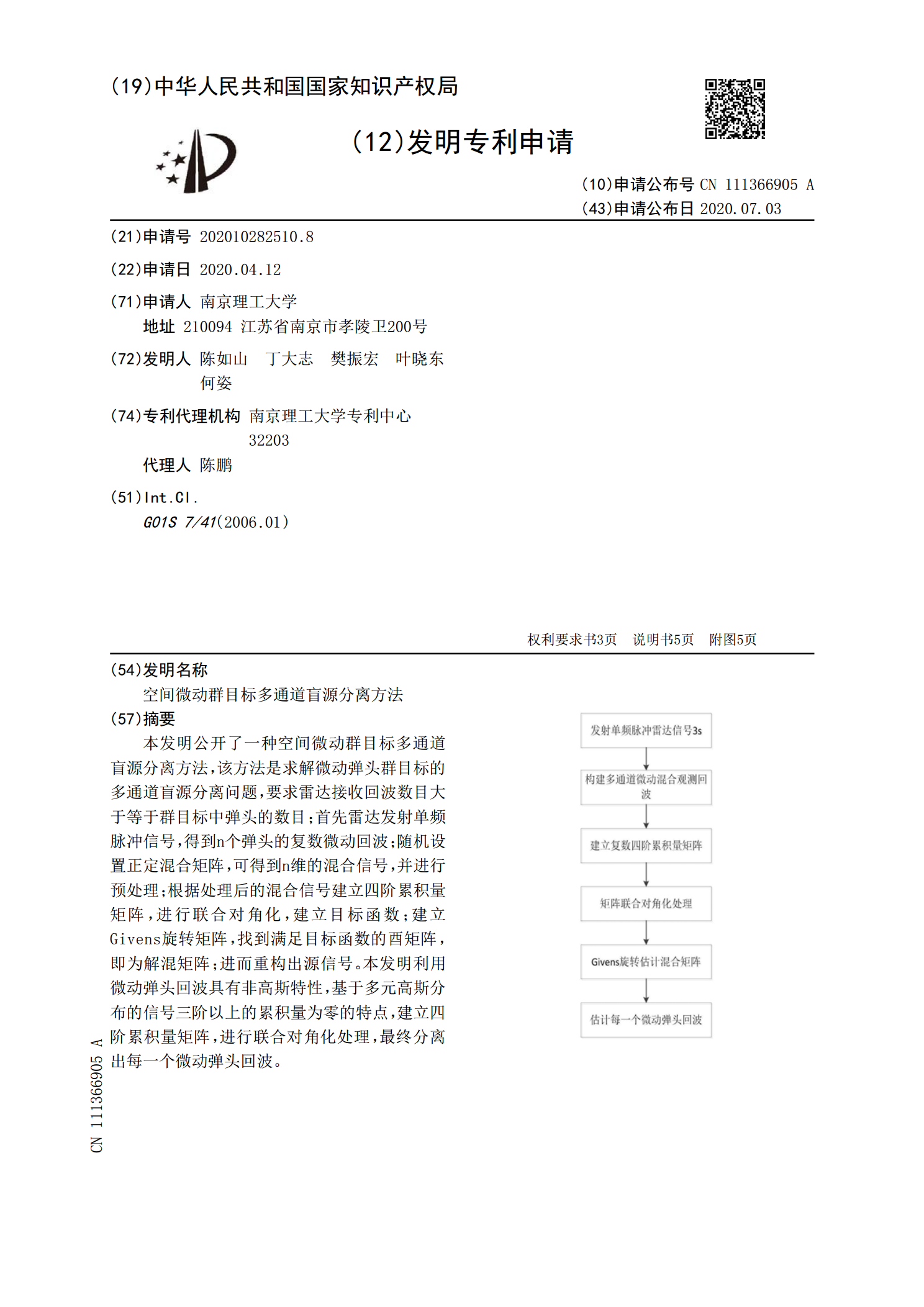
本发明公开了一种空间微动群目标多通道盲源分离方法,该方法是求解微动弹头群目标的多通道盲源分离问题,要求雷达接收回波数目大于等于群目标中弹头的数目;首先雷达发射单频脉冲信号,得到n个弹头的复数微动回波;随机设置正定混合矩阵,可得到n维的混合信号,并进行预处理;根据处理后的混合信号建立四阶累积量矩阵,进行联合对角化,建立目标函数;建立Givens旋转矩阵,找到满足目标函数的酉矩阵,即为解混矩阵;进而重构出源信号。本发明利用微动弹头回波具有非高斯特性,基于多元高斯分布的信号三阶以上的累积量为零的特点,建立四阶累