
基于激光雷达的机场风场特征探测方法、装置和设备.pdf

文宣****66


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于激光雷达的机场风场特征探测方法、装置和设备.pdf
本申请涉及基于激光雷达的机场风场特征探测方法、装置和设备,方法包括步骤:根据设定的配置策略对部署在机场预定位置的激光雷达进行扫描策略配置;根据激光雷达进行体积扫描获取的多普勒径向速度信息,反演得到扫描体积内的三维风场;从三维风场中提取600米以下的风场数据,根据600米以下的风场数据计算得到相应的F因子数值;提取多普勒径向速度信息中35.3°高度角的径向风速数据,通过部分傅里叶分解算法计算得到不同高度上的湍流的动能强度;提取多普勒径向速度信息中各高度角的多普勒频谱数据,通过多普勒频谱方法计算得到风场各径向
光电探测装置、相应的激光雷达及探测方法.pdf
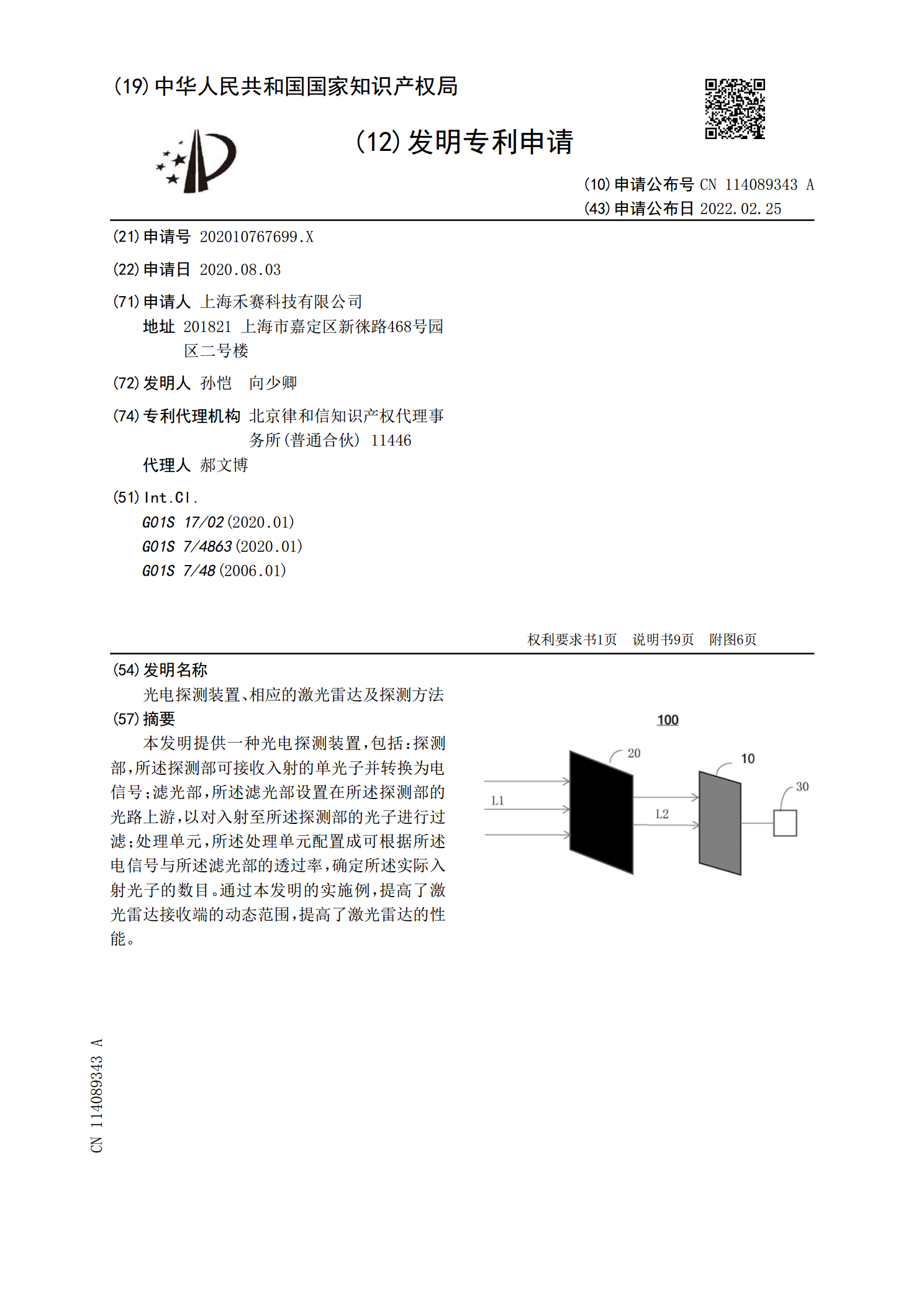
本发明提供一种光电探测装置,包括:探测部,所述探测部可接收入射的单光子并转换为电信号;滤光部,所述滤光部设置在所述探测部的光路上游,以对入射至所述探测部的光子进行过滤;处理单元,所述处理单元配置成可根据所述电信号与所述滤光部的透过率,确定所述实际入射光子的数目。通过本发明的实施例,提高了激光雷达接收端的动态范围,提高了激光雷达的性能。

基于多普勒气象雷达的风场获取方法、装置、设备和介质.pdf
本申请涉及一种基于多普勒气象雷达的风场获取方法、装置、设备和介质。所述方法包括:获取低空下多普勒气象雷达的目标径向速度;根据所述目标径向速度,对雷达资料数据进行变分反演处理,得到低空下的目标反演风场;其中,所述雷达资料数据用于表征多普勒气象雷达探测区域的背景场、雨水含量、径向速度和噪音。采用本方法能够提高确定低空下的目标反演风场的精确性和可靠性,不仅能够用于天气过程的精细预报、边界层动力结构研究、风环境检测和邻近预报,而且也能够为机场附近天气过程的精细化预报,临近预报等提供依据,从而肯定了对航空、大型体育
激光雷达系统和激光雷达探测方法.pdf
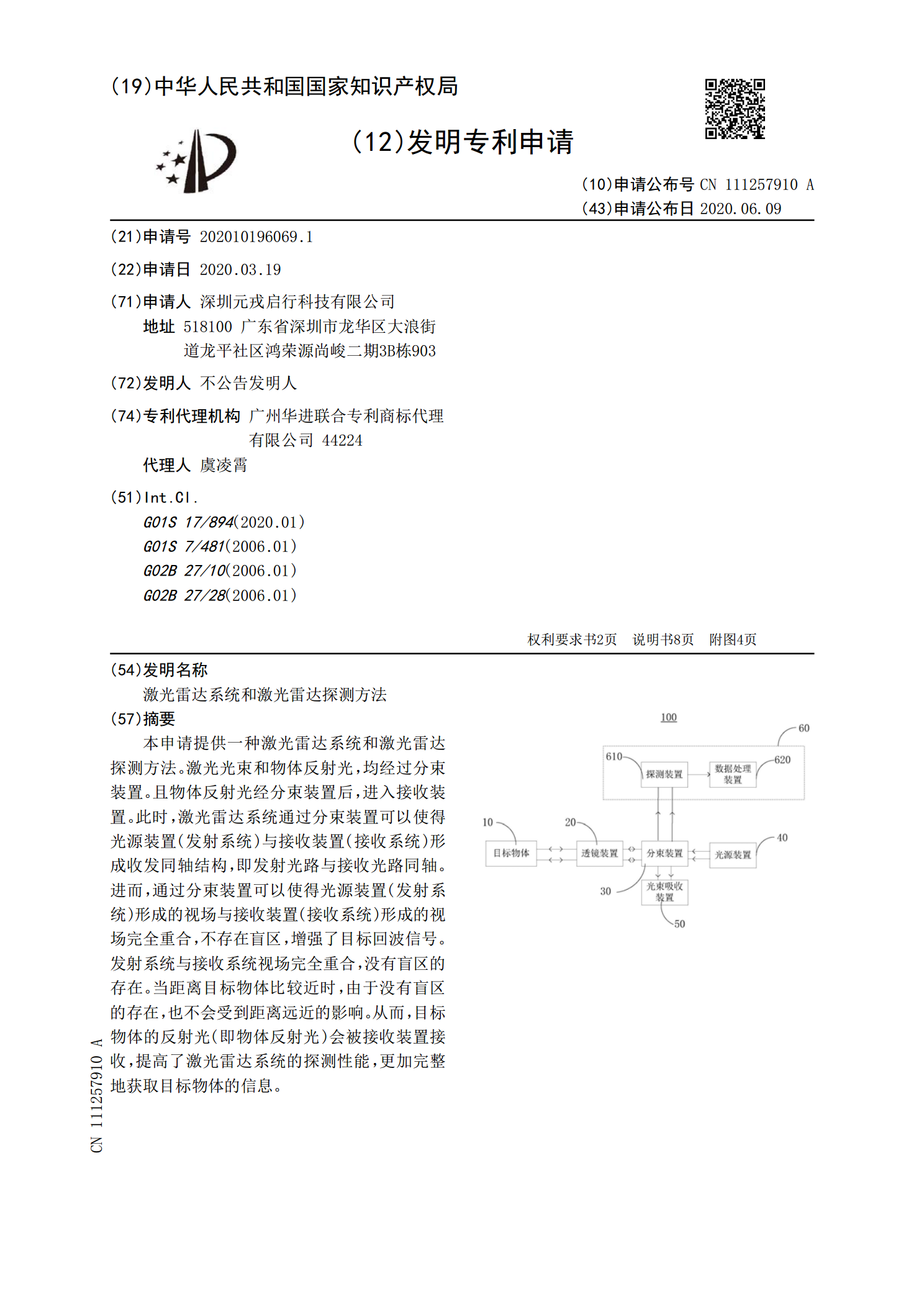
本申请提供一种激光雷达系统和激光雷达探测方法。激光光束和物体反射光,均经过分束装置。且物体反射光经分束装置后,进入接收装置。此时,激光雷达系统通过分束装置可以使得光源装置(发射系统)与接收装置(接收系统)形成收发同轴结构,即发射光路与接收光路同轴。进而,通过分束装置可以使得光源装置(发射系统)形成的视场与接收装置(接收系统)形成的视场完全重合,不存在盲区,增强了目标回波信号。发射系统与接收系统视场完全重合,没有盲区的存在。当距离目标物体比较近时,由于没有盲区的存在,也不会受到距离远近的影响。从而,目标物体

测风激光雷达有效探测边界的识别方法及装置.pdf
本发明公开了测风激光雷达有效探测边界的识别方法及装置,涉及测风激光雷达领域。该方法包括:获取测风激光雷达的谱数据;根据谱数据生成径向风速的矩阵;以任一径向风速为中心,计算预设大小范围内的径向风速的方差,用方差替换任一径向风速,直到得到方差的矩阵;根据预设方差门限值对全部方差进行过滤,保留小于预设方差门限值的方差;通过滑动窗口对过滤后方差的矩阵中的空值进行搜索,根据搜索结果确定有效探测边界。本发明提供的识别方法及装置,不依赖于硬件平台,具有很好的可移植性,同时,还具有识别速度快、识别准确率高的优点。