
目标检测方法、装置、计算机设备和存储介质.pdf

是雁****找我


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标检测方法、装置、设备和存储介质.pdf
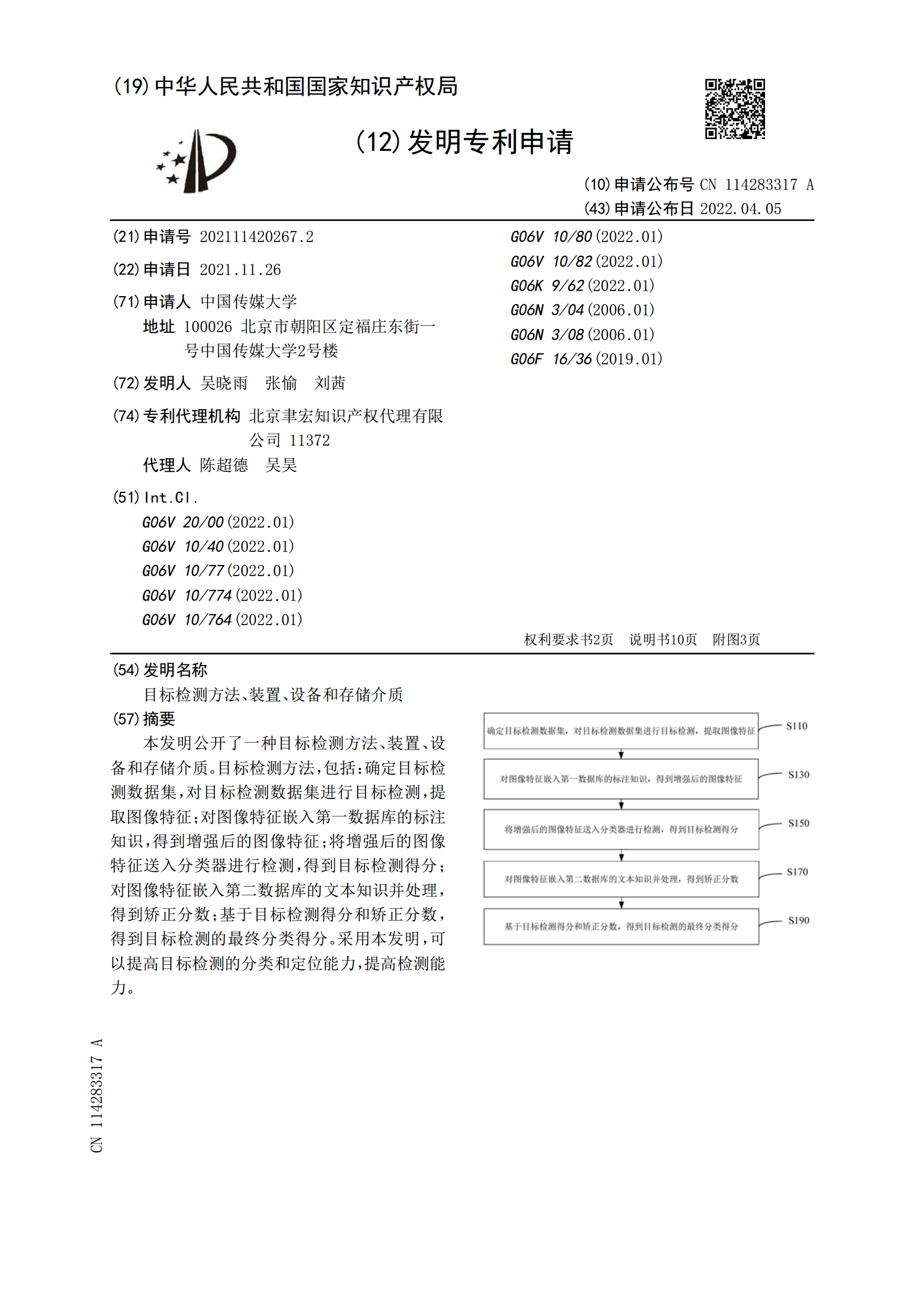
本发明公开了一种目标检测方法、装置、设备和存储介质。目标检测方法,包括:确定目标检测数据集,对目标检测数据集进行目标检测,提取图像特征;对图像特征嵌入第一数据库的标注知识,得到增强后的图像特征;将增强后的图像特征送入分类器进行检测,得到目标检测得分;对图像特征嵌入第二数据库的文本知识并处理,得到矫正分数;基于目标检测得分和矫正分数,得到目标检测的最终分类得分。采用本发明,可以提高目标检测的分类和定位能力,提高检测能力。
目标检测方法、装置、设备和存储介质.pdf
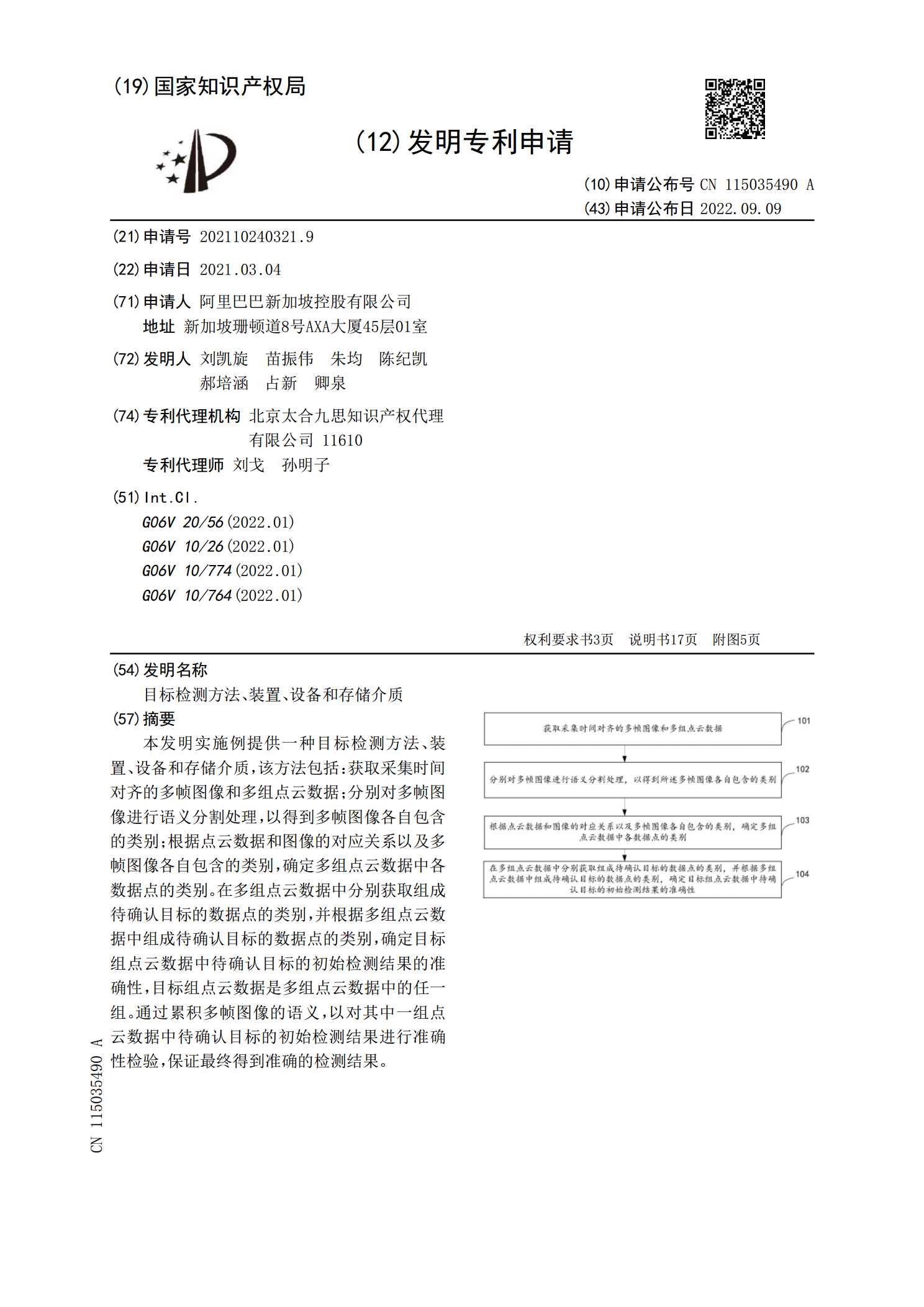
本发明实施例提供一种目标检测方法、装置、设备和存储介质,该方法包括:获取采集时间对齐的多帧图像和多组点云数据;分别对多帧图像进行语义分割处理,以得到多帧图像各自包含的类别;根据点云数据和图像的对应关系以及多帧图像各自包含的类别,确定多组点云数据中各数据点的类别。在多组点云数据中分别获取组成待确认目标的数据点的类别,并根据多组点云数据中组成待确认目标的数据点的类别,确定目标组点云数据中待确认目标的初始检测结果的准确性,目标组点云数据是多组点云数据中的任一组。通过累积多帧图像的语义,以对其中一组点云数据中待确

目标检测方法、装置、计算机设备和存储介质.pdf
本申请涉及一种目标检测方法、装置、计算机设备和存储介质,其中,该方法包括:获取当前运动点迹和雷达跟踪目标的预测运动信息,并基于预测运动信息和当前运动点迹确定雷达跟踪目标对应的目标运动点迹,预测运动信息包括预测距离、预测速度以及预测方位角;获取目标运动点迹对应的目标距离多普勒位置,并获取目标距离多普勒位置对应的相邻距离多普勒位置;基于相邻距离多普勒位置获取干扰抑制系数,并基于干扰抑制系数、目标距离多普勒位置和预测方位角获取雷达跟踪目标的当前位置信息。通过本申请,解决了相关技术中,无法准确地对同距同速弱目标的
目标检测方法、装置、计算机设备和存储介质.pdf
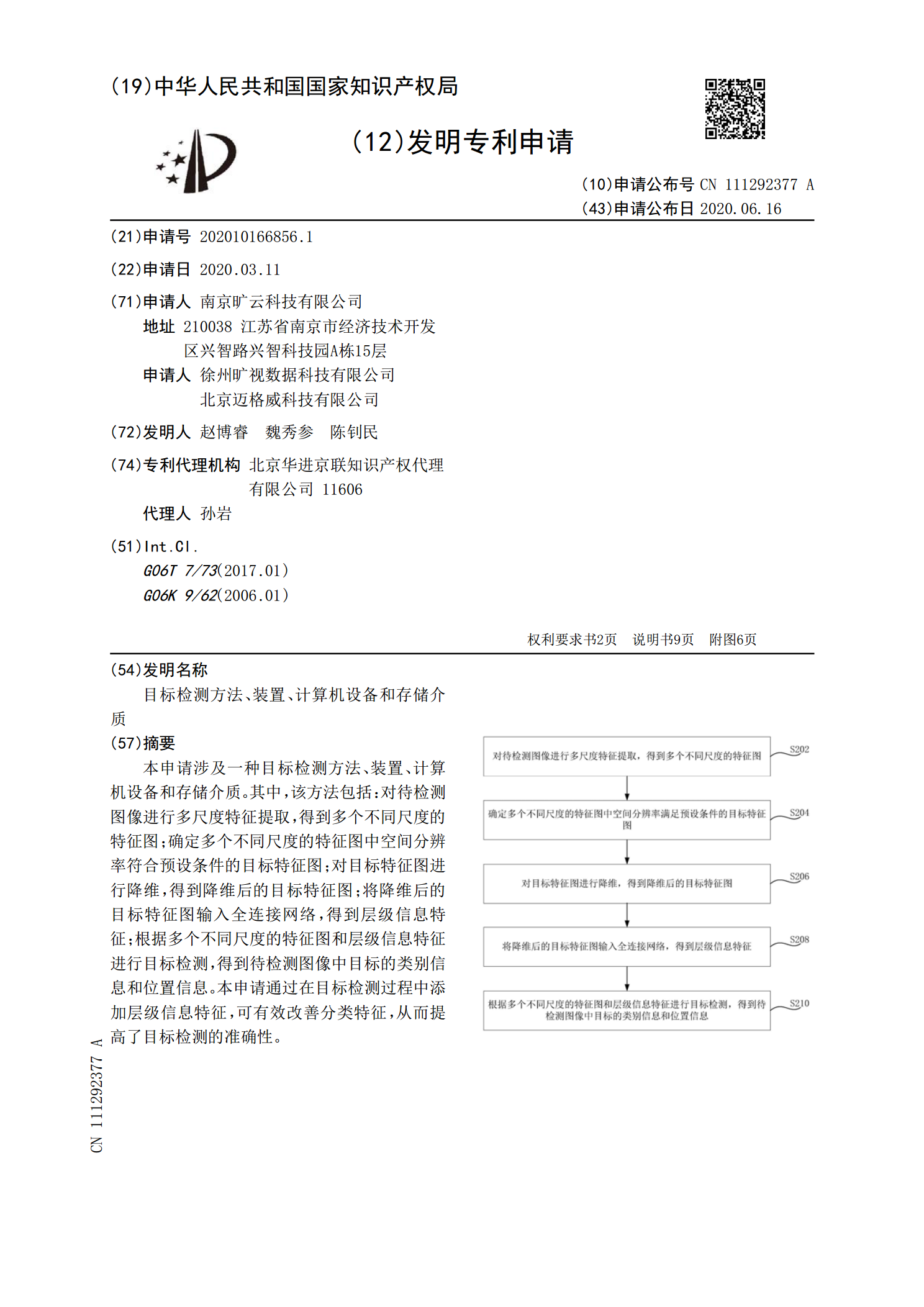
本申请涉及一种目标检测方法、装置、计算机设备和存储介质。其中,该方法包括:对待检测图像进行多尺度特征提取,得到多个不同尺度的特征图;确定多个不同尺度的特征图中空间分辨率符合预设条件的目标特征图;对目标特征图进行降维,得到降维后的目标特征图;将降维后的目标特征图输入全连接网络,得到层级信息特征;根据多个不同尺度的特征图和层级信息特征进行目标检测,得到待检测图像中目标的类别信息和位置信息。本申请通过在目标检测过程中添加层级信息特征,可有效改善分类特征,从而提高了目标检测的准确性。

目标检测方法、装置、计算机设备和存储介质.pdf
本申请涉及一种目标检测方法、装置、计算机设备和存储介质。所述方法包括:将包括待检测目标的目标图像输入至第一检测模型,确定所述待检测目标所对应的第一检测框和所述待检测目标的目标部位所对应的第二检测框;将所述目标图像输入至第二检测模型,确定所述待检测目标所对应的第三检测框;对所述第一检测框和所述第三检测框进行匹配,确定目标检测框;将关联后的所述目标检测框和所述第二检测框确定为所述待检测目标的检测结果。通过本发明实施例,提高了检测精度,可以避免检测框位置不准的问题。