
基于时域与频域的卡尔曼平滑滤波方法及平滑滤波器.pdf

是你****韵呀

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于时域与频域的卡尔曼平滑滤波方法及平滑滤波器.pdf
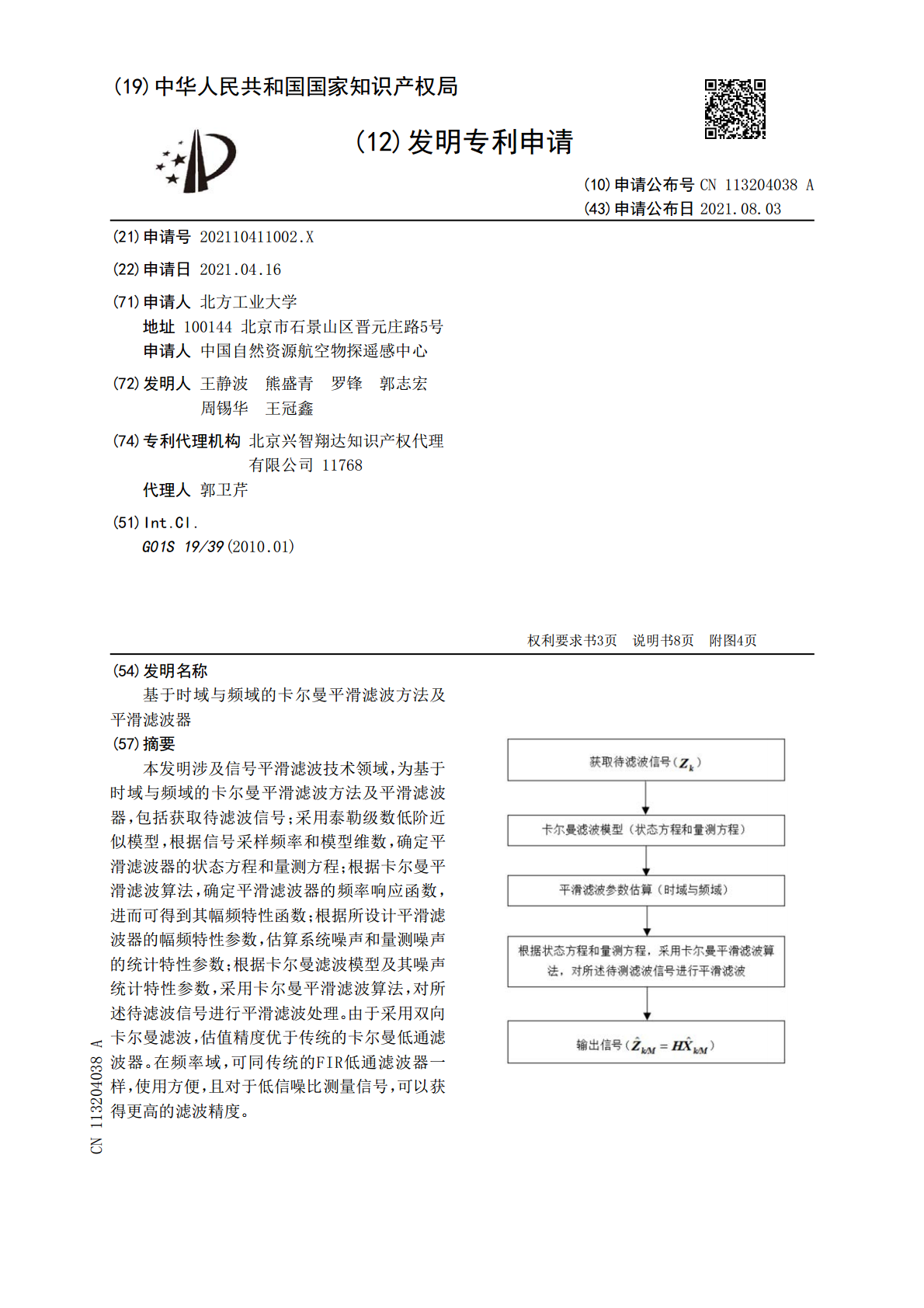
本发明涉及信号平滑滤波技术领域,为基于时域与频域的卡尔曼平滑滤波方法及平滑滤波器,包括获取待滤波信号;采用泰勒级数低阶近似模型,根据信号采样频率和模型维数,确定平滑滤波器的状态方程和量测方程;根据卡尔曼平滑滤波算法,确定平滑滤波器的频率响应函数,进而可得到其幅频特性函数;根据所设计平滑滤波器的幅频特性参数,估算系统噪声和量测噪声的统计特性参数;根据卡尔曼滤波模型及其噪声统计特性参数,采用卡尔曼平滑滤波算法,对所述待滤波信号进行平滑滤波处理。由于采用双向卡尔曼滤波,估值精度优于传统的卡尔曼低通滤波器。在频率

基于平滑变结构-卡尔曼滤波的MIMU-BDS组合导航技术.docx
基于平滑变结构-卡尔曼滤波的MIMU/BDS组合导航技术李灿沈强秦伟伟段志强汪立新摘要:为了提高模型不准确、大扰动等情况下MIMU/BDS组合导航精度,提出了平滑变结构-卡尔曼组合滤波的信息融合方法。介绍了坐标转换方法,建立了组合导航系统的状态空间方程和观测方程。为了防止老旧观测数据引起算法发散,在卡尔曼滤波算法中融入随残差自适应变化的渐消因子,从而构造了自适应卡尔曼滤波算法。将卡尔曼滤波的精度优势与平滑变结构滤波的鲁棒性优势融合,提出了平滑变结构-卡尔曼组合滤波算法。经仿真验证,在模型不准确、大扰动等情

一种基于自调整卡尔曼滤波的多普勒辅助载波相位平滑伪距方法.pdf
本发明公开了一种基于自调整卡尔曼滤波的多普勒辅助载波相位平滑伪距方法,属于全球卫星导航系统伪距单点定位领域。本发明方案利用多普勒频移对码伪距的初值进行估计,并结合载波相位完成周跳检测,以决定卡尔曼滤波器的平滑方式以及过程噪声方差的大小;之后利用信噪比测量值的变化情况实现了卡尔曼滤波器的观测噪声方差的自调整,最终完成对码伪距的平滑。本发明方案解决了码伪距精度低的问题,消除了周跳对载波相位平滑伪距的影响,能够在复杂环境下得到精度较高的伪距,进而能够提高单点定位精度,且不仅限于静态定位场合,具有广阔的应用前景。

卡尔曼滤波器.doc
卡尔曼滤波器–KalmanFilter1.什么是卡尔曼滤波器(WhatistheKalmanFilter?)在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!卡尔曼全名RudolfEmilKalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。我们现在要学习的卡尔曼滤波器,正是源于他的

用高斯滤波器平滑图像.ppt
2、术语定义边缘点:在亮度显著变化的位置上的点.边缘段:对应于边缘点坐标及其方位.边缘检测器:从图像中抽取边缘集合的算法.轮廓:边缘列表或一条表示边缘列表的拟合曲线.边缘连接:从无序边缘表形成有序边缘表的过程.边缘跟踪:一个用来确定轮廊的图像搜索过程.两种常见的边缘一阶导数和二阶导数示意图6.1梯度用差分来近似梯度:6.2边缘检测算法Roberts算子:Sobel算子:Prewitt算子:Dr.JudithPrewitt各种算法的比较6.3二阶微分算子拉普拉斯算子用算子表示:二阶方向导数6.4LoG算法L