
一种管道自动焊接检测机器人的自动行走机构.pdf

瀚玥****魔王

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道自动焊接检测机器人的自动行走机构.pdf
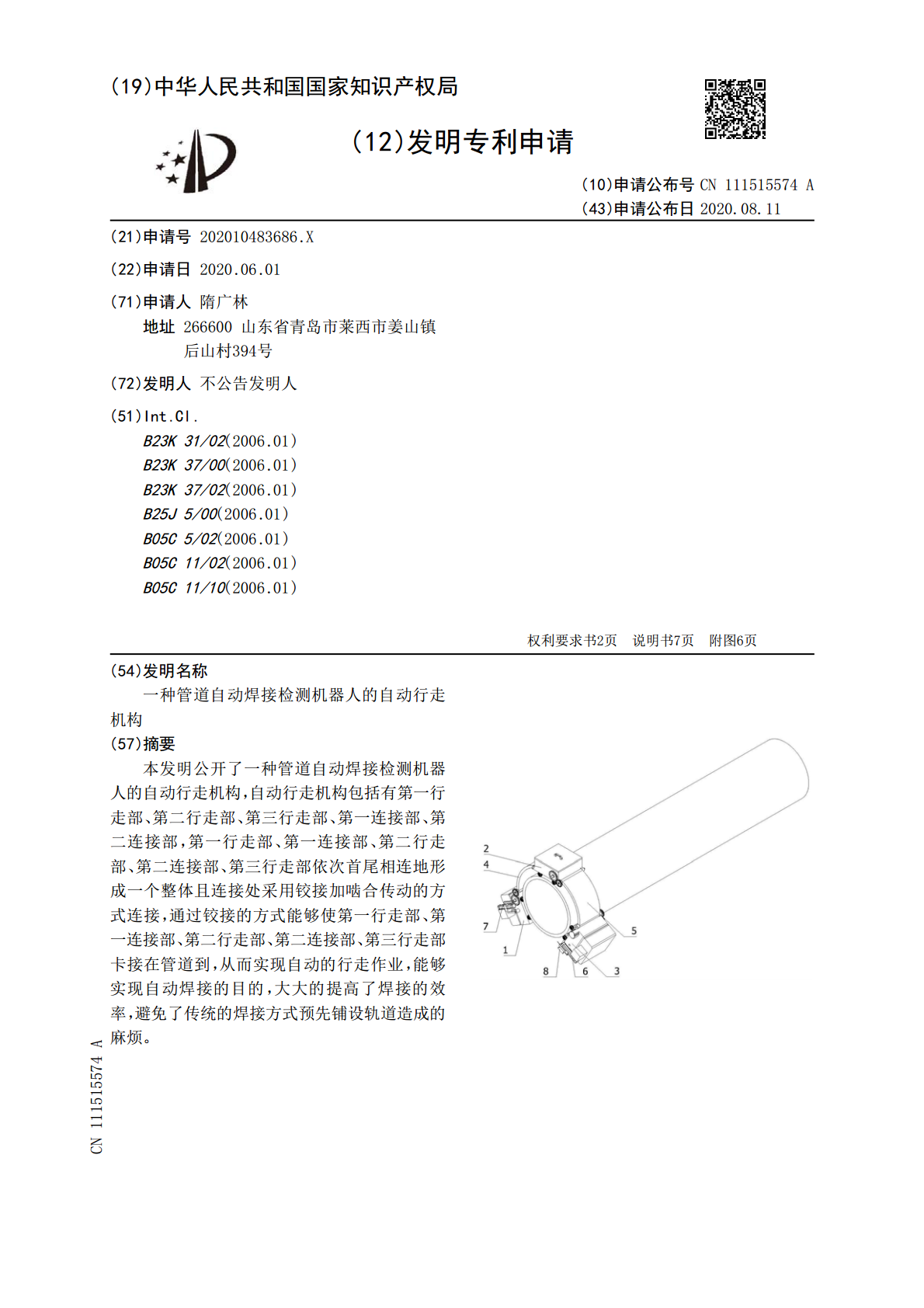
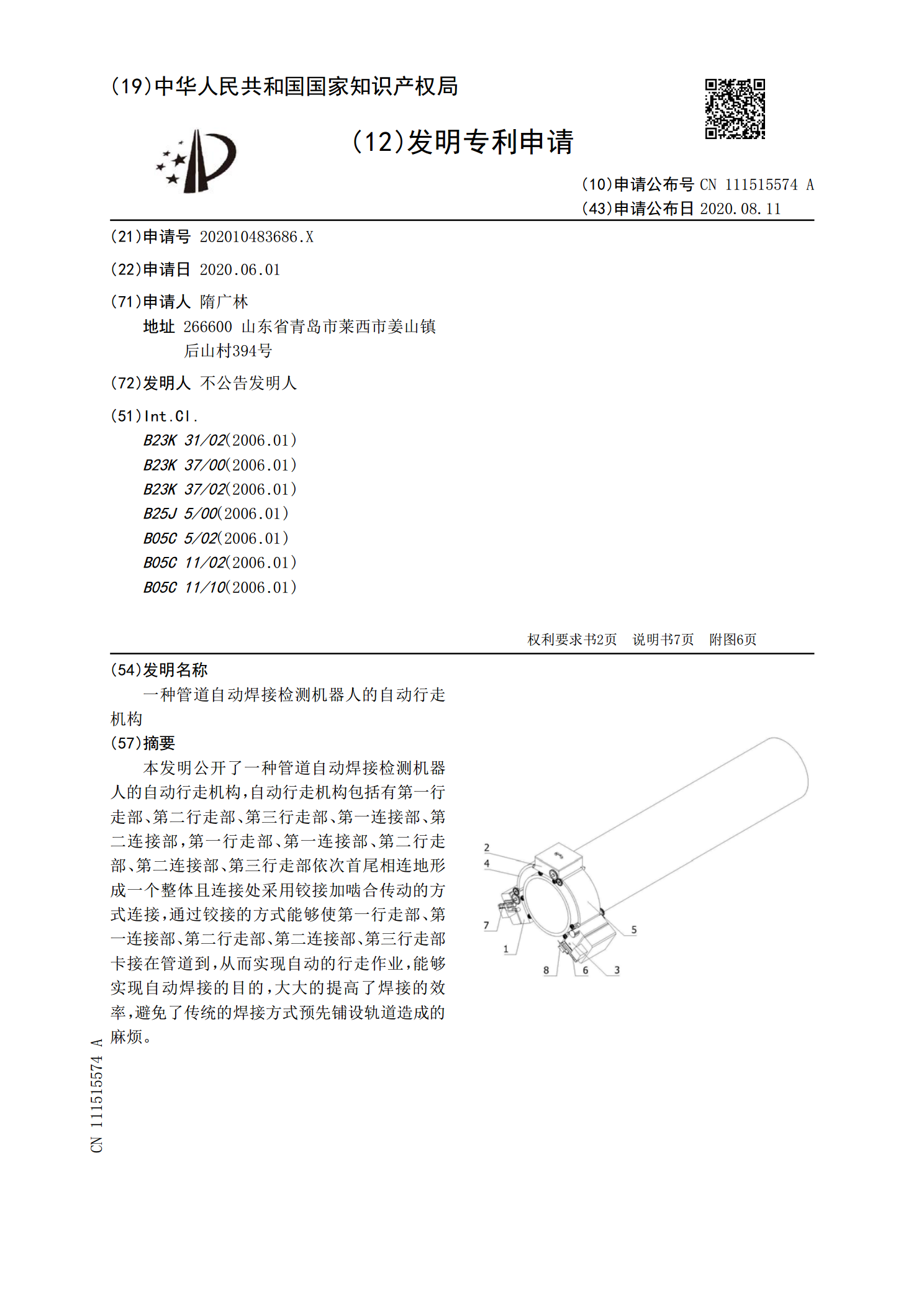
本发明公开了一种管道自动焊接检测机器人的自动行走机构,自动行走机构包括有第一行走部、第二行走部、第三行走部、第一连接部、第二连接部,第一行走部、第一连接部、第二行走部、第二连接部、第三行走部依次首尾相连地形成一个整体且连接处采用铰接加啮合传动的方式连接,通过铰接的方式能够使第一行走部、第一连接部、第二行走部、第二连接部、第三行走部卡接在管道到,从而实现自动的行走作业,能够实现自动焊接的目的,大大的提高了焊接的效率,避免了传统的焊接方式预先铺设轨道造成的麻烦。

一种管道自动焊接检测机器人.pdf
本发明涉及管道焊接技术领域,具体是涉及一种管道自动焊接机器人,包括有第一行走部、第二行走部、第三行走部、第一连接部、第二连接部组成的行走机构及焊接机构、沥青铺设机构、焊缝跟踪器、电源和控制器;第一行走部、第一连接部、第二行走部、第二连接部、第三行走部依次首尾相连地形成一个整体且连接处采用铰接加啮合传动的方式连接,焊接机构和沥青铺设机构分别安装在第三行走部和第一行走部上,焊缝跟踪器安装在焊接机构输出端上随焊接机构输出端一同运动;该方案可以在不设置轨道的情况下贴着管壁行走,安装和拆卸方便,焊接和铺设沥青效率高
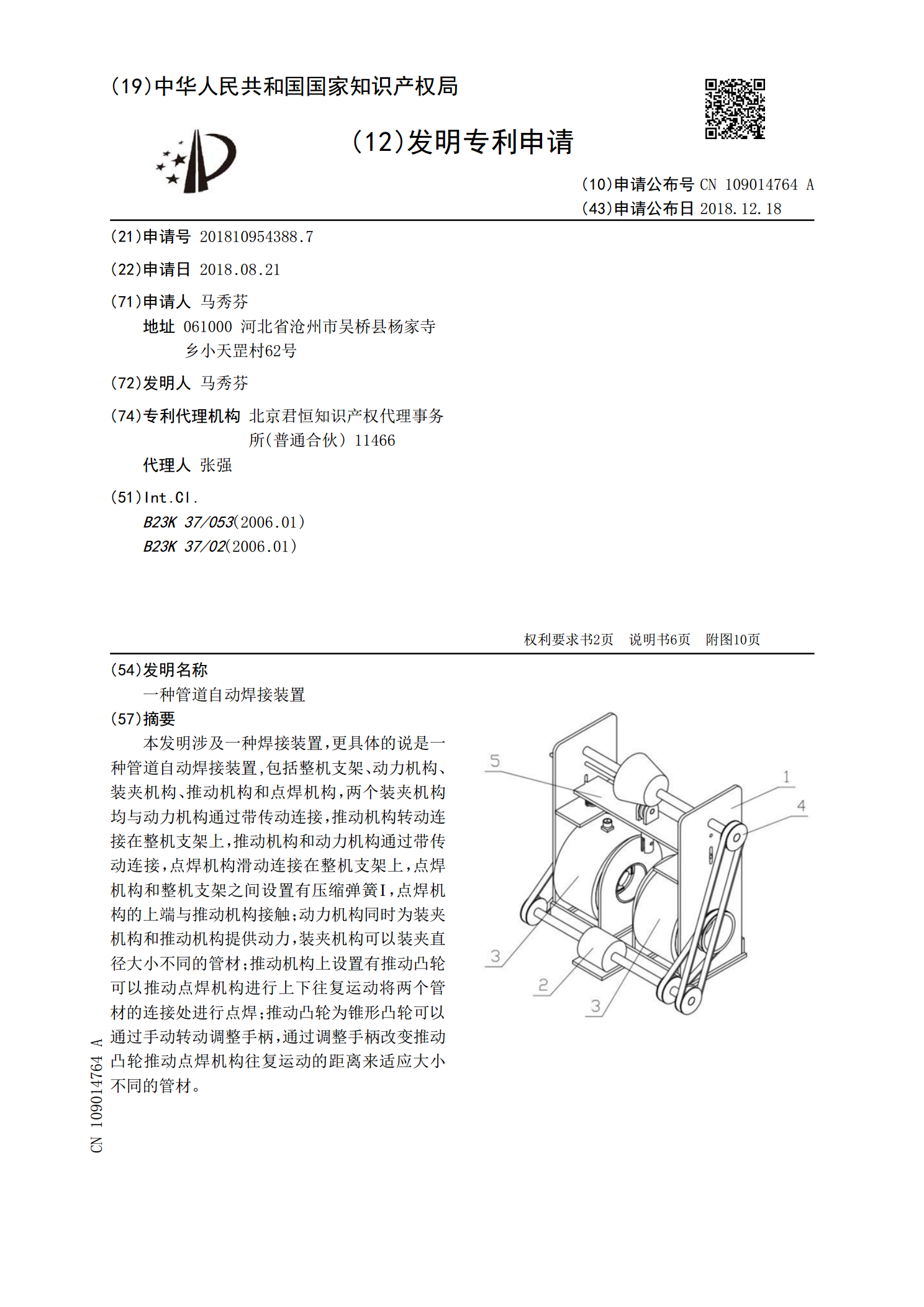
一种管道自动焊接装置.pdf
本发明涉及一种焊接装置,更具体的说是一种管道自动焊接装置,包括整机支架、动力机构、装夹机构、推动机构和点焊机构,两个装夹机构均与动力机构通过带传动连接,推动机构转动连接在整机支架上,推动机构和动力机构通过带传动连接,点焊机构滑动连接在整机支架上,点焊机构和整机支架之间设置有压缩弹簧Ⅰ,点焊机构的上端与推动机构接触;动力机构同时为装夹机构和推动机构提供动力,装夹机构可以装夹直径大小不同的管材;推动机构上设置有推动凸轮可以推动点焊机构进行上下往复运动将两个管材的连接处进行点焊;推动凸轮为锥形凸轮可以通过手动转
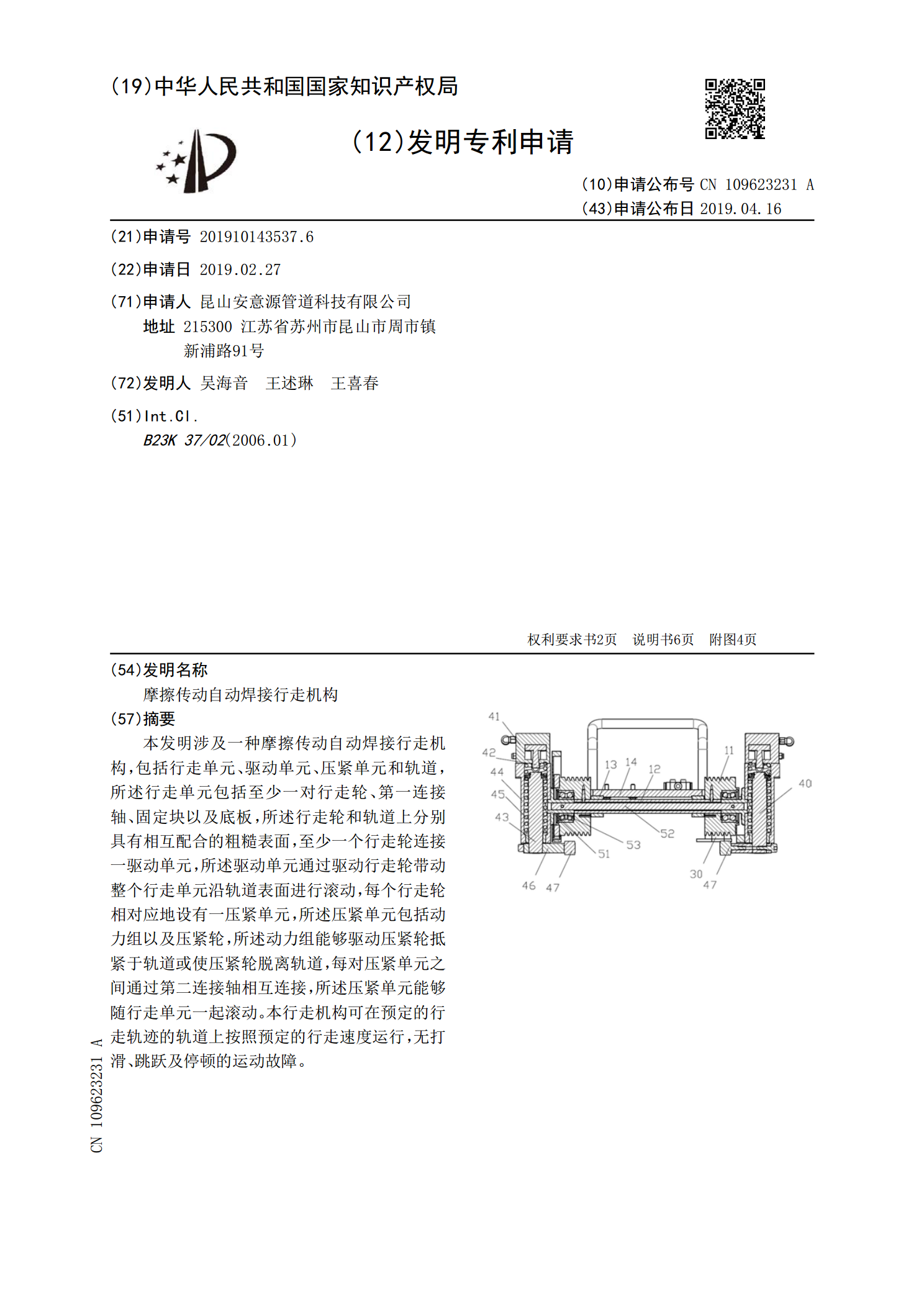
摩擦传动自动焊接行走机构.pdf
本发明涉及一种摩擦传动自动焊接行走机构,包括行走单元、驱动单元、压紧单元和轨道,所述行走单元包括至少一对行走轮、第一连接轴、固定块以及底板,所述行走轮和轨道上分别具有相互配合的粗糙表面,至少一个行走轮连接一驱动单元,所述驱动单元通过驱动行走轮带动整个行走单元沿轨道表面进行滚动,每个行走轮相对应地设有一压紧单元,所述压紧单元包括动力组以及压紧轮,所述动力组能够驱动压紧轮抵紧于轨道或使压紧轮脱离轨道,每对压紧单元之间通过第二连接轴相互连接,所述压紧单元能够随行走单元一起滚动。本行走机构可在预定的行走轨迹的轨道
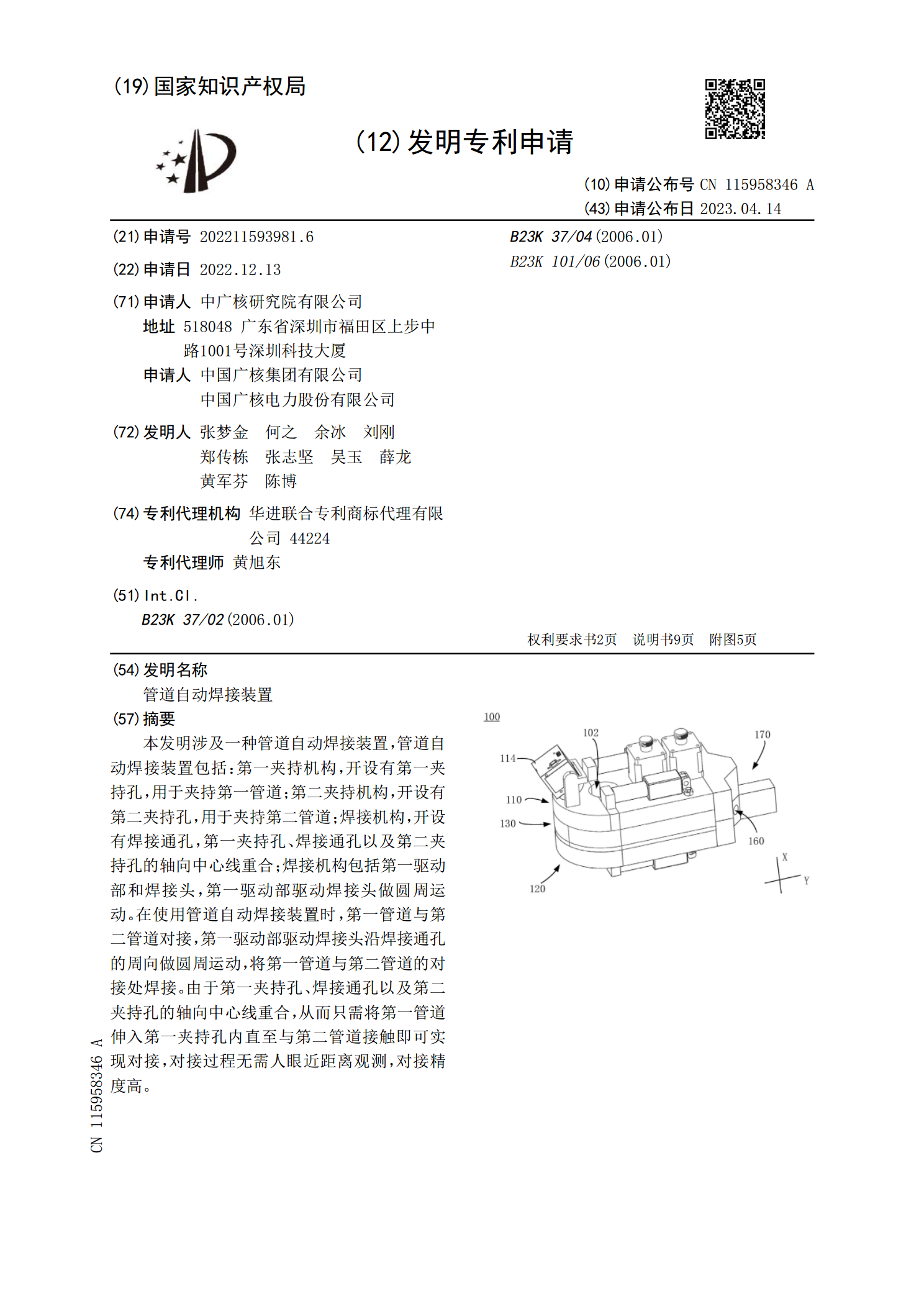
管道自动焊接装置.pdf
本发明涉及一种管道自动焊接装置,管道自动焊接装置包括:第一夹持机构,开设有第一夹持孔,用于夹持第一管道;第二夹持机构,开设有第二夹持孔,用于夹持第二管道;焊接机构,开设有焊接通孔,第一夹持孔、焊接通孔以及第二夹持孔的轴向中心线重合;焊接机构包括第一驱动部和焊接头,第一驱动部驱动焊接头做圆周运动。在使用管道自动焊接装置时,第一管道与第二管道对接,第一驱动部驱动焊接头沿焊接通孔的周向做圆周运动,将第一管道与第二管道的对接处焊接。由于第一夹持孔、焊接通孔以及第二夹持孔的轴向中心线重合,从而只需将第一管道伸入第一