
一种管道自动焊接检测机器人.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道自动焊接检测机器人.pdf
本发明涉及管道焊接技术领域,具体是涉及一种管道自动焊接机器人,包括有第一行走部、第二行走部、第三行走部、第一连接部、第二连接部组成的行走机构及焊接机构、沥青铺设机构、焊缝跟踪器、电源和控制器;第一行走部、第一连接部、第二行走部、第二连接部、第三行走部依次首尾相连地形成一个整体且连接处采用铰接加啮合传动的方式连接,焊接机构和沥青铺设机构分别安装在第三行走部和第一行走部上,焊缝跟踪器安装在焊接机构输出端上随焊接机构输出端一同运动;该方案可以在不设置轨道的情况下贴着管壁行走,安装和拆卸方便,焊接和铺设沥青效率高
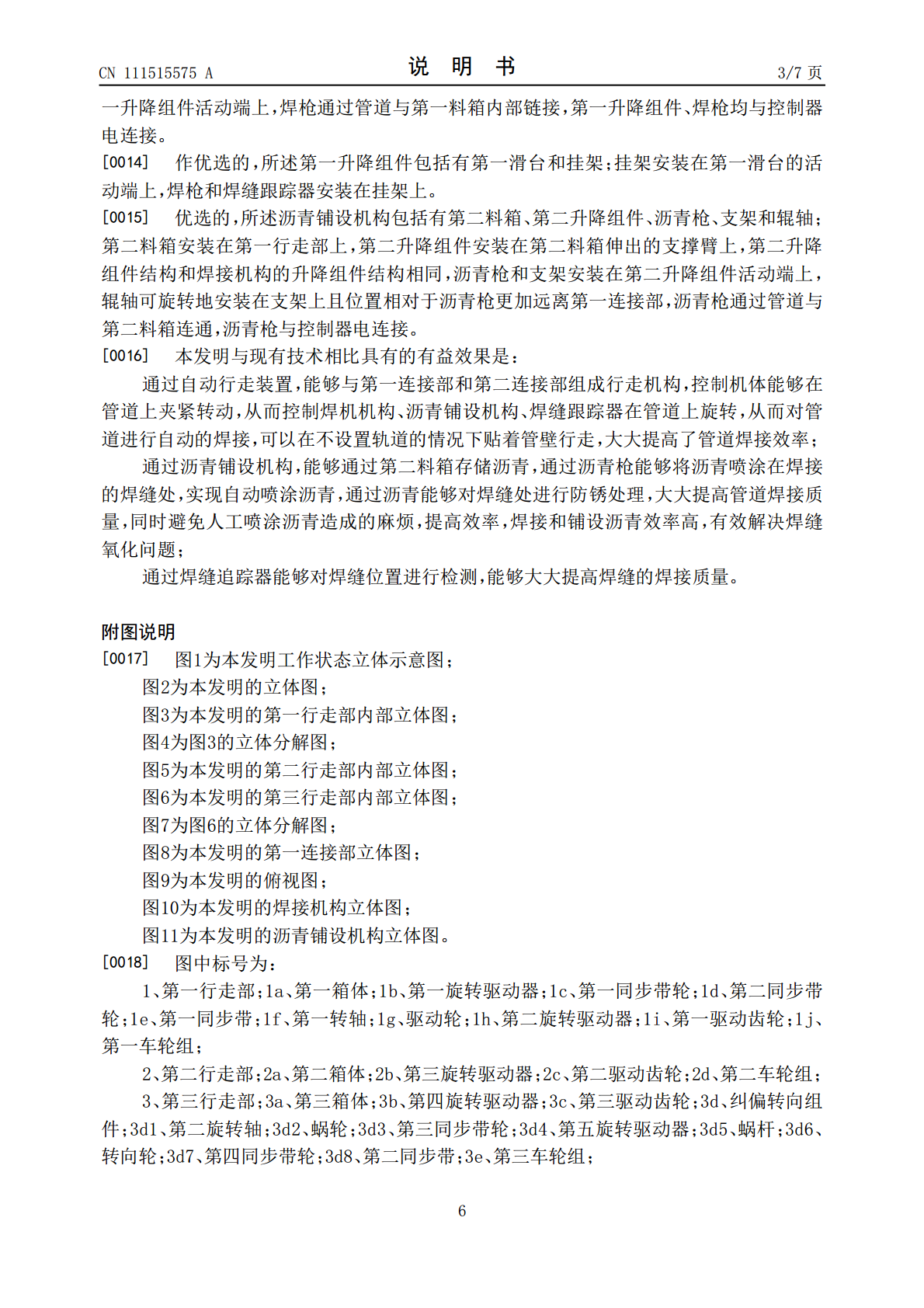
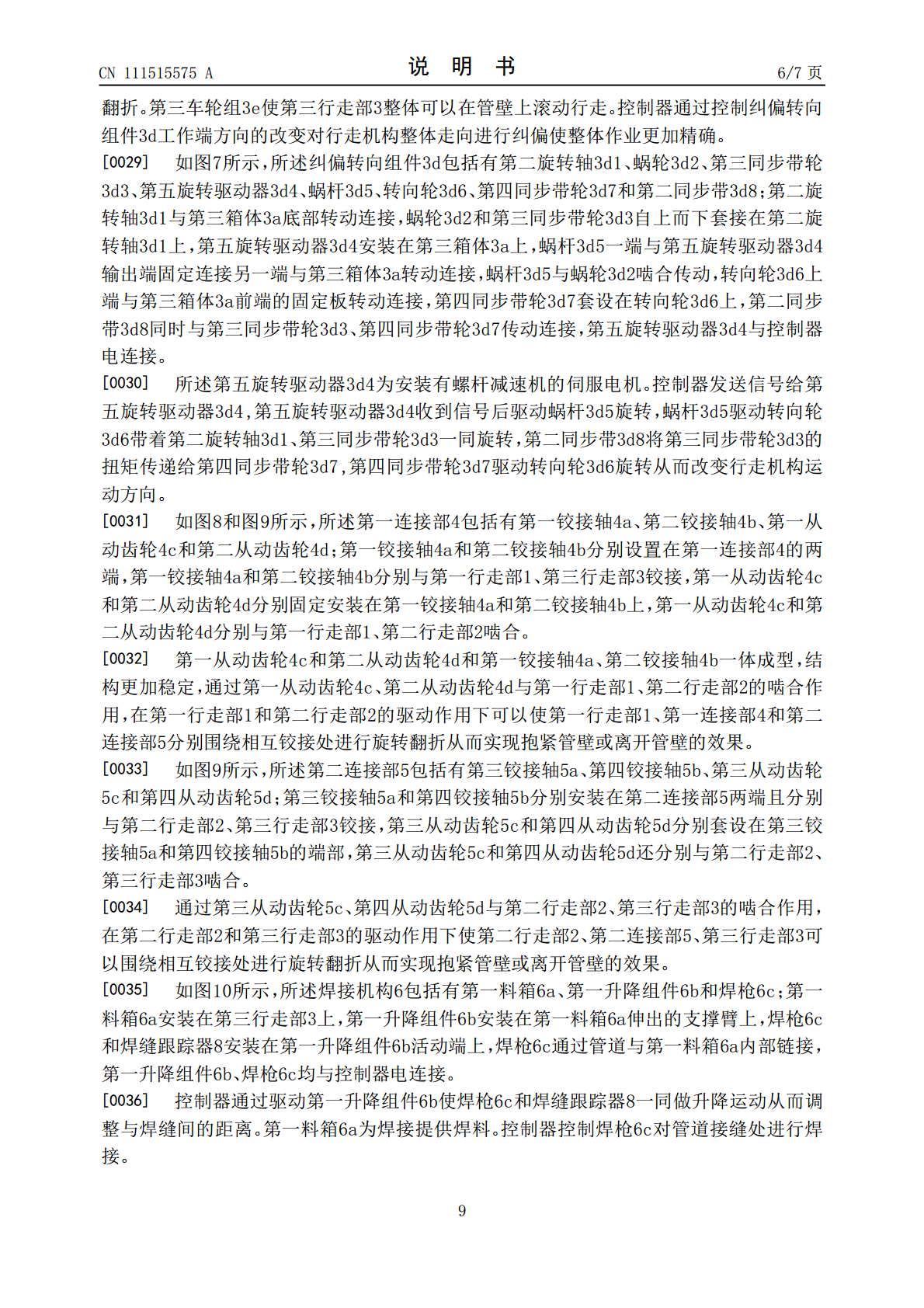
一种管道自动焊接检测机器人的自动行走机构.pdf
本发明公开了一种管道自动焊接检测机器人的自动行走机构,自动行走机构包括有第一行走部、第二行走部、第三行走部、第一连接部、第二连接部,第一行走部、第一连接部、第二行走部、第二连接部、第三行走部依次首尾相连地形成一个整体且连接处采用铰接加啮合传动的方式连接,通过铰接的方式能够使第一行走部、第一连接部、第二行走部、第二连接部、第三行走部卡接在管道到,从而实现自动的行走作业,能够实现自动焊接的目的,大大的提高了焊接的效率,避免了传统的焊接方式预先铺设轨道造成的麻烦。
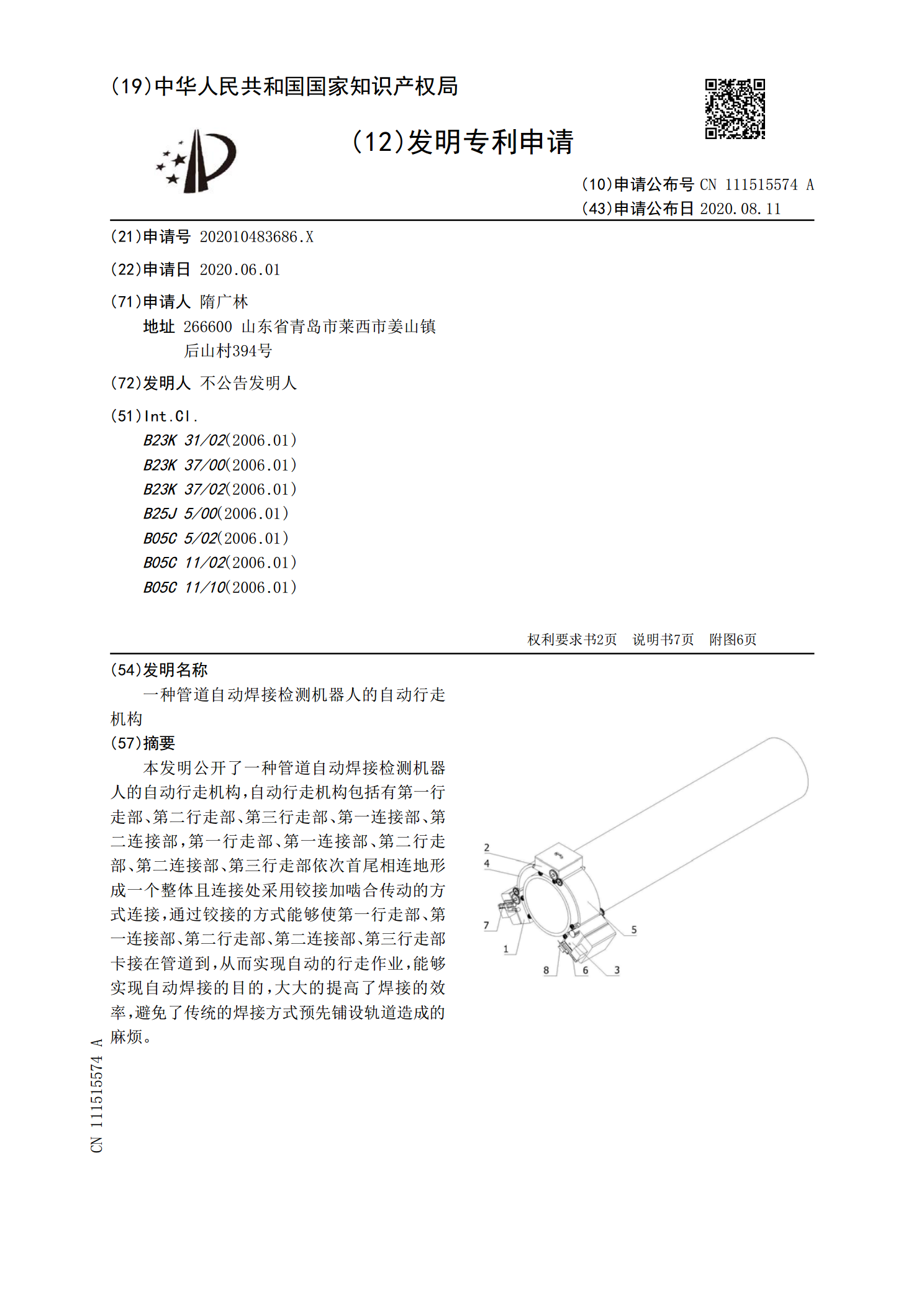
一种管道焊接夹具、管道焊接机器人及管道焊接方法.pdf
本发明公开了一种管道焊接夹具、管道焊接机器人及管道焊接方法,所述管道焊接夹具包括支撑杆、两个箍夹和两个驱动件,所述支撑杆沿左右方向水平设置,两个所述箍夹均为半圆环形,两个所述箍夹均竖向设置,并沿左右方向分布,且两个所述箍夹的槽口相互靠近,两个所述箍夹的上端均与所述支撑杆长度方向对应的中部转动连接,两个所述驱动件与两个所述箍夹一一对应,每个所述驱动件与对于所述箍夹传动连接,两个所述驱动件驱动两个所述箍夹转动至合拢成圆环形以将管道夹紧,或转动至展开以将所述管道松开,如此可由两个驱动件驱动两个所述箍夹合拢至圆环
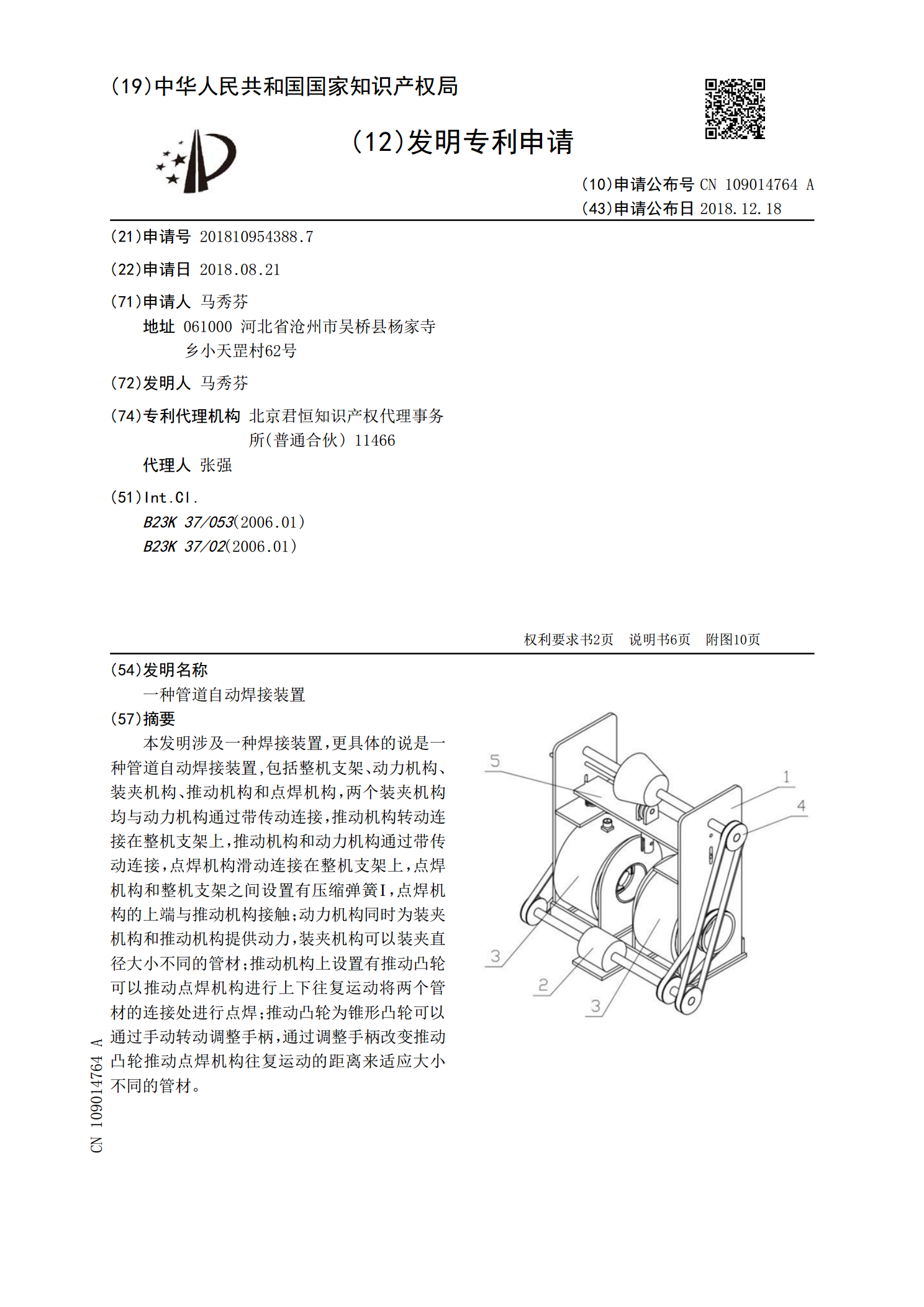
一种管道自动焊接装置.pdf
本发明涉及一种焊接装置,更具体的说是一种管道自动焊接装置,包括整机支架、动力机构、装夹机构、推动机构和点焊机构,两个装夹机构均与动力机构通过带传动连接,推动机构转动连接在整机支架上,推动机构和动力机构通过带传动连接,点焊机构滑动连接在整机支架上,点焊机构和整机支架之间设置有压缩弹簧Ⅰ,点焊机构的上端与推动机构接触;动力机构同时为装夹机构和推动机构提供动力,装夹机构可以装夹直径大小不同的管材;推动机构上设置有推动凸轮可以推动点焊机构进行上下往复运动将两个管材的连接处进行点焊;推动凸轮为锥形凸轮可以通过手动转
一种机器人自动焊接焊缝跟踪检测方法.pdf
本发明公开了一种机器人自动焊接焊缝跟踪检测方法,包括以下步骤:采用人工神经网络算法模拟脉冲焊接熔池的动态过程;用实时采集和处理得到的焊接熔池动态特征参数来训练人工神经网模型,进行自学习;在CO2滴落的短路过度过程中摄取熔池的视觉图像,从而获取焊接场景特征;图像经过计算机处理后提取焊接熔池几何参数,焊接熔池几何参数为熔池面积、熔池长度、熔池宽度及熔池轮廓曲线,根据焊接熔池几何参数,实时调节焊接电流,从而控制焊接熔深。本发明通过在CO2滴落短路过度过程摄取熔池特征,避免电弧闪烁、飞溅和烟尘对摄像过程产生的干扰