
用于连结机器定子的系统、方法和设备.pdf

鸿朗****ka

1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于连结机器定子的系统、方法和设备.pdf
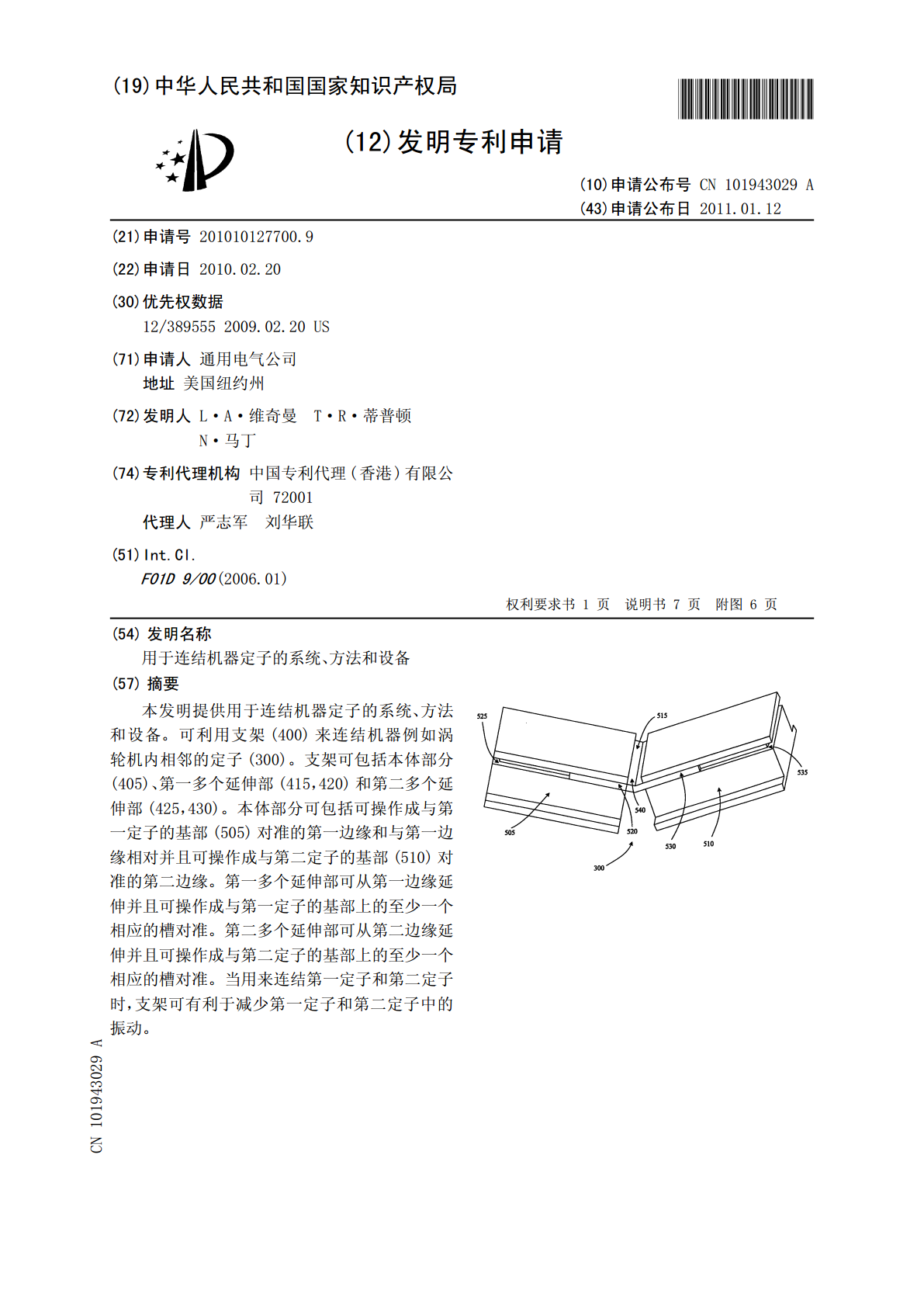
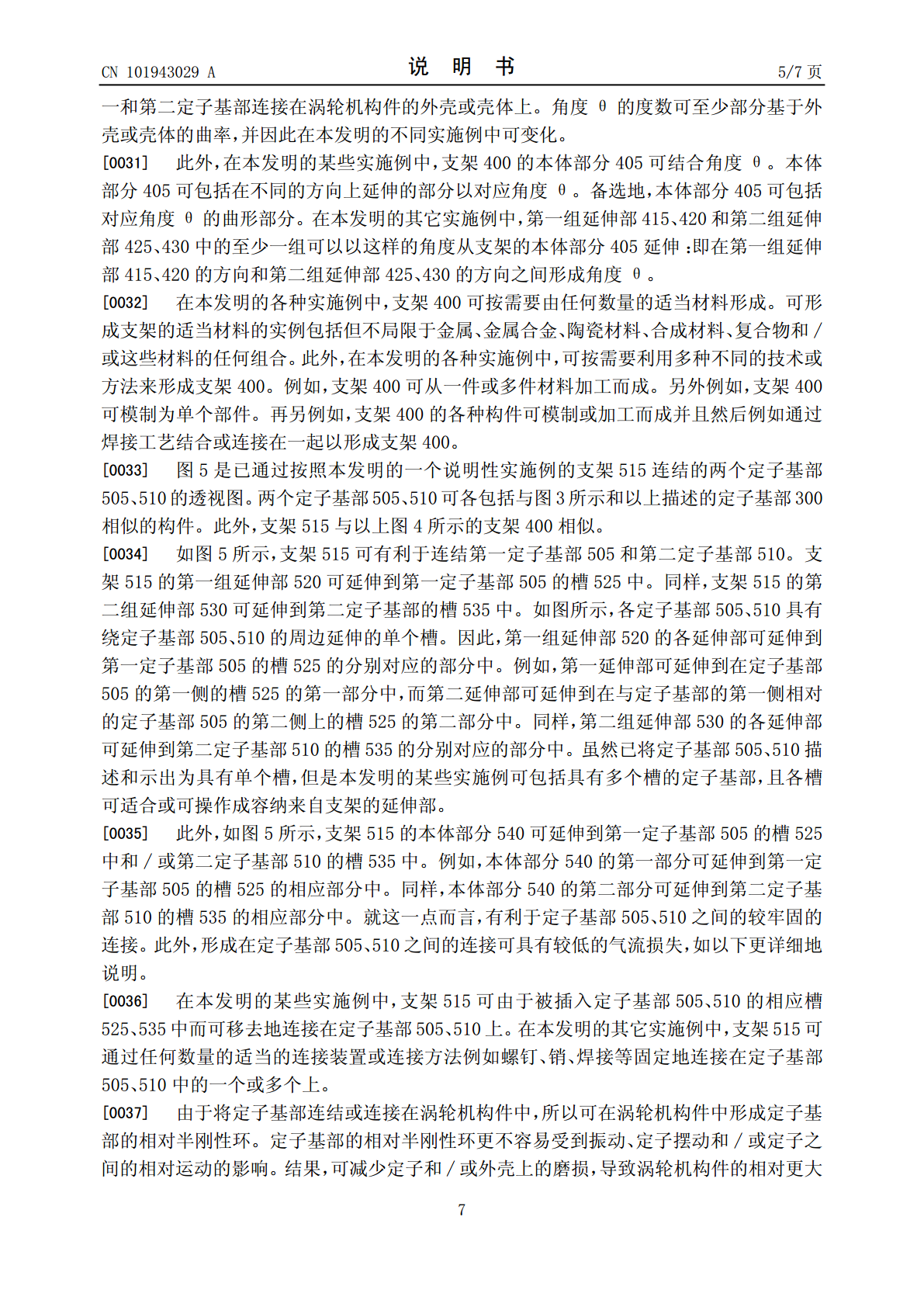
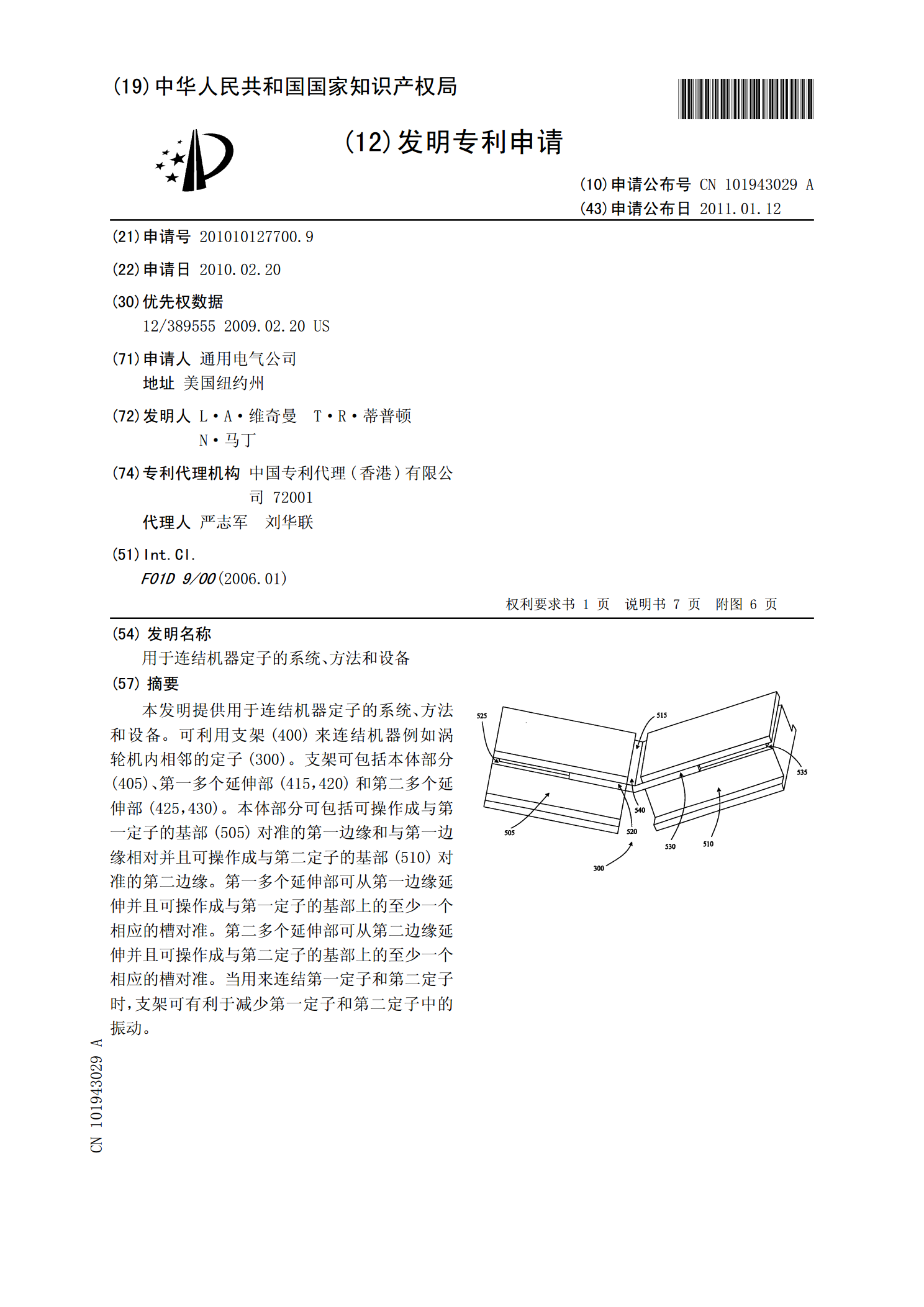
本发明提供用于连结机器定子的系统、方法和设备。可利用支架(400)来连结机器例如涡轮机内相邻的定子(300)。支架可包括本体部分(405)、第一多个延伸部(415,420)和第二多个延伸部(425,430)。本体部分可包括可操作成与第一定子的基部(505)对准的第一边缘和与第一边缘相对并且可操作成与第二定子的基部(510)对准的第二边缘。第一多个延伸部可从第一边缘延伸并且可操作成与第一定子的基部上的至少一个相应的槽对准。第二多个延伸部可从第二边缘延伸并且可操作成与第二定子的基部上的至少一个相应的槽对准。当

用于检查定子导叶的系统和方法.pdf
本发明涉及用于检查定子导叶的系统和方法。本发明的实施例包括用以检查燃气轮机发动机(12)的压缩机(18)的内部构件的检查系统。该检查系统包括图像记录组件(50),图像记录组件(50)具有一个或多个图像记录装置(54)、光源(56)、存储装置(58)和电源(60)。图像记录组件(50)可插入压缩机(18)中,而无需移除压缩机壳体(34)或拆开压缩机(18)。图像记录组件(50)可以可拆卸地联接到压缩机(18)的旋转构件(30)(例如转子叶片)上,并且可用来记录压缩机(18)的固定构件(36)(例如定子导叶)
用于训练用于生成图像的机器学习系统的设备和方法.pdf
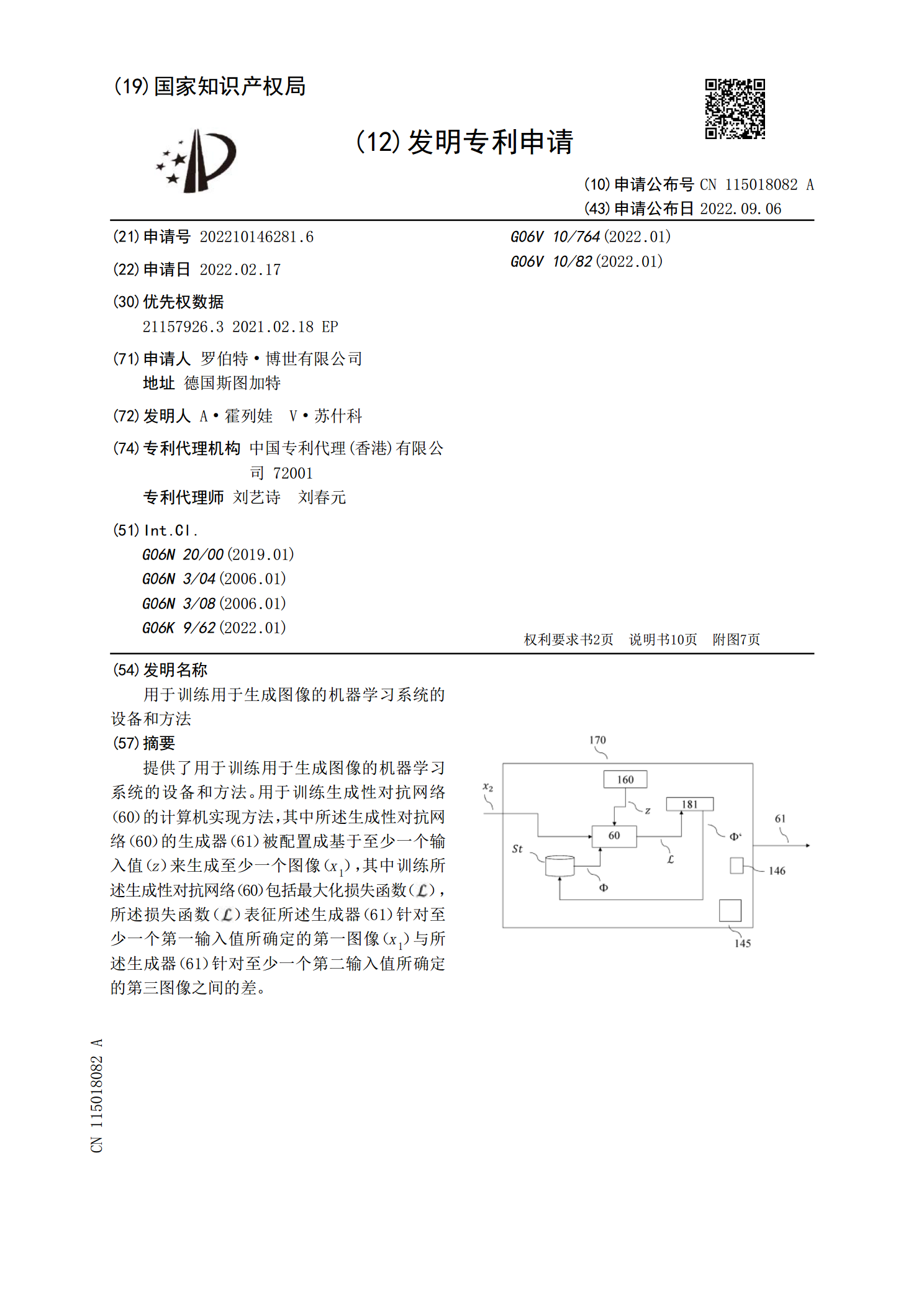
提供了用于训练用于生成图像的机器学习系统的设备和方法。用于训练生成性对抗网络(60)的计算机实现方法,其中所述生成性对抗网络(60)的生成器(61)被配置成基于至少一个输入值(<base:Italic>z</base:Italic>)来生成至少一个图像(<base:Italic>x</base:Italic><base:Sub>1</base:Sub>),其中训练所述生成性对抗网络(60)包括最大化损失函数(<base:Imagehe=@14@wi=@13@file=@100004_DEST_PATH_I
用于监视机器人设备的方法和系统.pdf
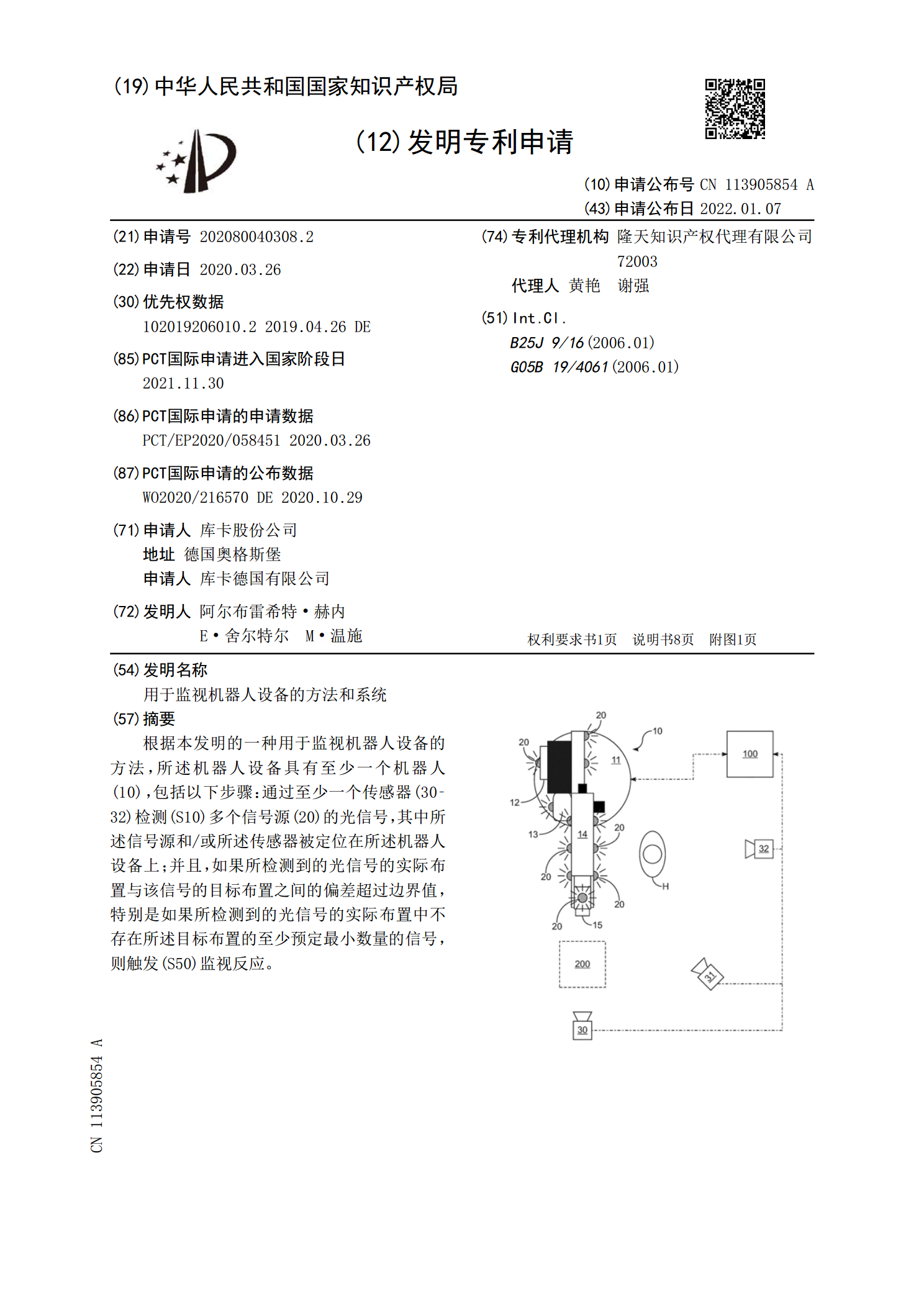
根据本发明的一种用于监视机器人设备的方法,所述机器人设备具有至少一个机器人(10),包括以下步骤:通过至少一个传感器(30‑32)检测(S10)多个信号源(20)的光信号,其中所述信号源和/或所述传感器被定位在所述机器人设备上;并且,如果所检测到的光信号的实际布置与该信号的目标布置之间的偏差超过边界值,特别是如果所检测到的光信号的实际布置中不存在所述目标布置的至少预定最小数量的信号,则触发(S50)监视反应。

用于电机器的定子.pdf
本发明涉及一种带有至少一个定子体(1a)的用于电机器的定子(1),其中,在与定子体(1a)的组合中可布置有用于构造成电机器的转子,尤其地转子的转动轴线可被大致定位在定子体(1a)的纵轴线上,其中,在定子体(1a)的周缘处设置有多个在定子体(1a)的纵向上延伸的轴向槽(2),其中,至少一根铜线(3)和/或至少一个线圈绕组可被放入到一个或确定的轴向槽(2)中,其中,在轴向槽(2)中在铜线(3)或者线圈绕组与定子体(1a)的材料之间布置有至少部分可变形的绝缘元件(4),且其中,为了至少部分遮盖至少部分径向敞开地