
一种下肢外骨骼助力装置及控制方法.pdf

丹烟****魔王


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种下肢外骨骼助力装置及控制方法.pdf
本发明涉及一种助力装置,特别涉及一种下肢外骨骼助力装置,包括大腿连接杆、小腿连接杆、腰护垫、髋关节和膝关节;其中,大腿连杆和小腿连杆通过膝关节连接,腰护垫和大腿连杆通过髋关节连接;所述髋关节、膝关节的关节部分包括关节箱体、伺服电机、谐波齿轮、主动蜗轮和从动蜗轮,伺服电机连接于关节箱体上,所述主动蜗轮和谐波齿轮与伺服电机同轴连接,从动齿轮和主动蜗轮啮合,髋关节的从动齿轮和大腿连杆连接、膝关节的从动齿轮与小腿连杆连接;本发明可以为行动不便的穿戴者提供行走的动力,以达到省力的目的,并且本发明具有较高的可靠性和稳
下肢外骨骼控制方法及装置.pdf
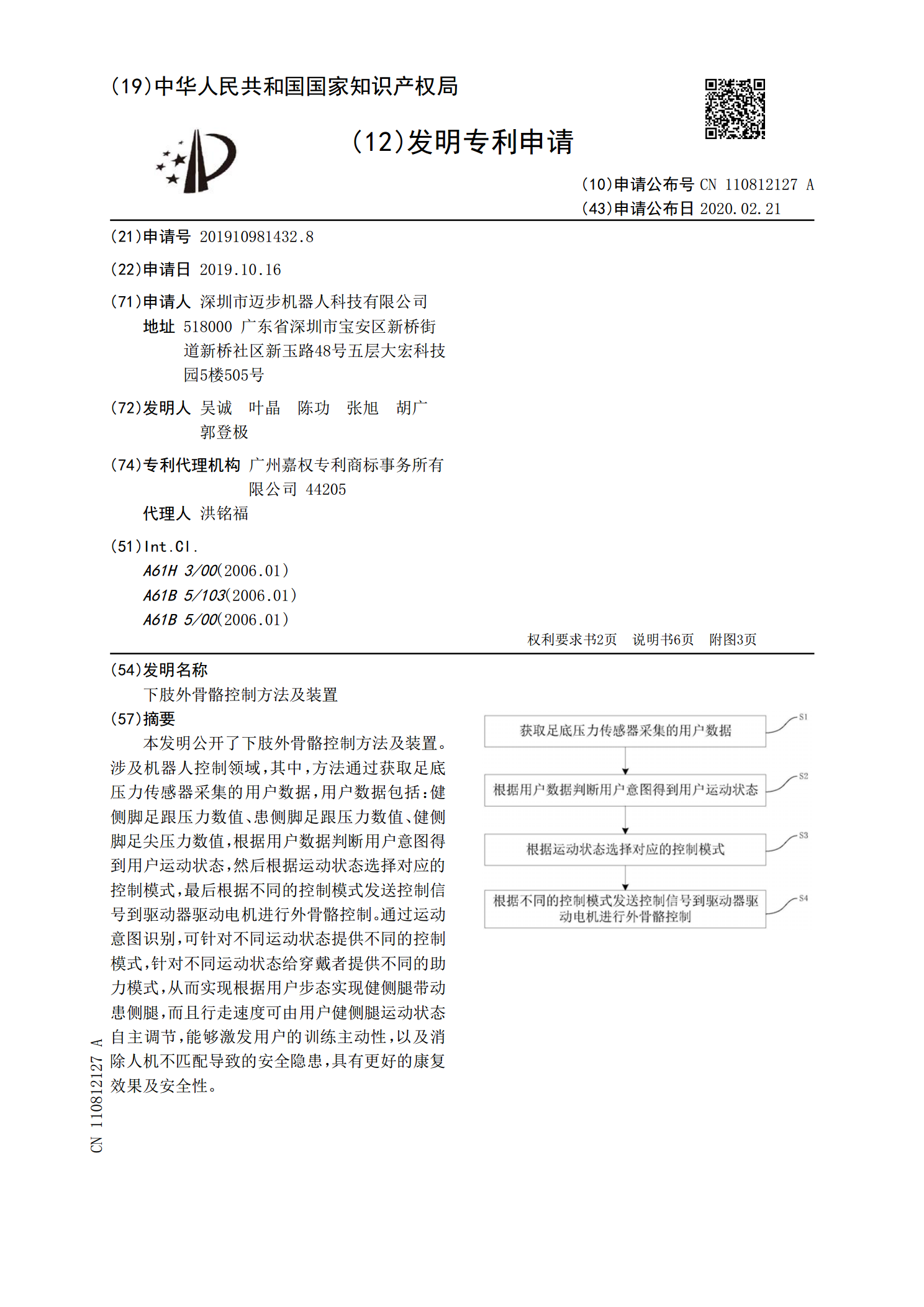
本发明公开了下肢外骨骼控制方法及装置。涉及机器人控制领域,其中,方法通过获取足底压力传感器采集的用户数据,用户数据包括:健侧脚足跟压力数值、患侧脚足跟压力数值、健侧脚足尖压力数值,根据用户数据判断用户意图得到用户运动状态,然后根据运动状态选择对应的控制模式,最后根据不同的控制模式发送控制信号到驱动器驱动电机进行外骨骼控制。通过运动意图识别,可针对不同运动状态提供不同的控制模式,针对不同运动状态给穿戴者提供不同的助力模式,从而实现根据用户步态实现健侧腿带动患侧腿,而且行走速度可由用户健侧腿运动状态自主调节,
一种软性下肢助力外骨骼.pdf
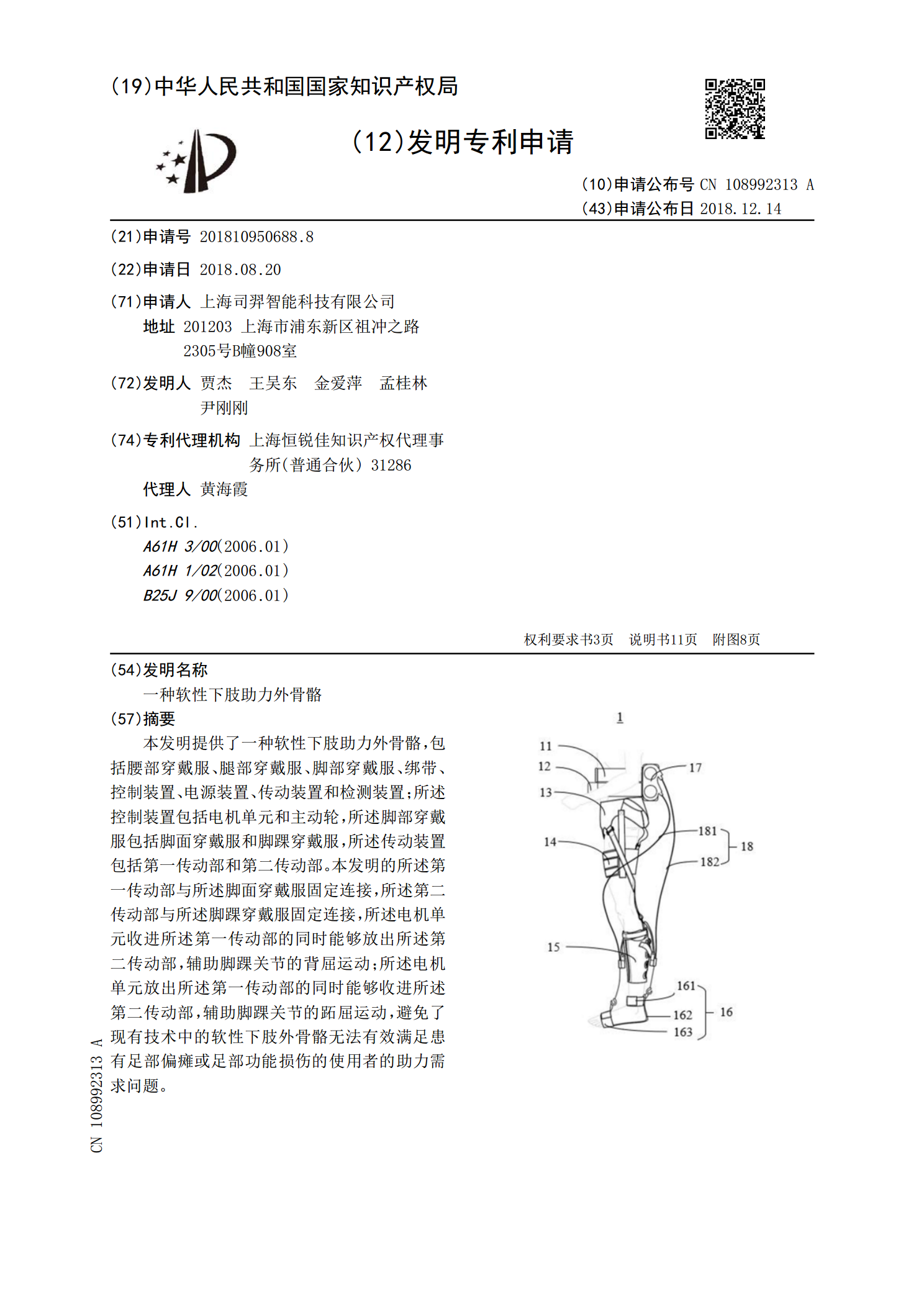
本发明提供了一种软性下肢助力外骨骼,包括腰部穿戴服、腿部穿戴服、脚部穿戴服、绑带、控制装置、电源装置、传动装置和检测装置;所述控制装置包括电机单元和主动轮,所述脚部穿戴服包括脚面穿戴服和脚踝穿戴服,所述传动装置包括第一传动部和第二传动部。本发明的所述第一传动部与所述脚面穿戴服固定连接,所述第二传动部与所述脚踝穿戴服固定连接,所述电机单元收进所述第一传动部的同时能够放出所述第二传动部,辅助脚踝关节的背屈运动;所述电机单元放出所述第一传动部的同时能够收进所述第二传动部,辅助脚踝关节的跖屈运动,避免了现有技术中
一种气动肌肉驱动的下肢外骨骼助力装置.pdf
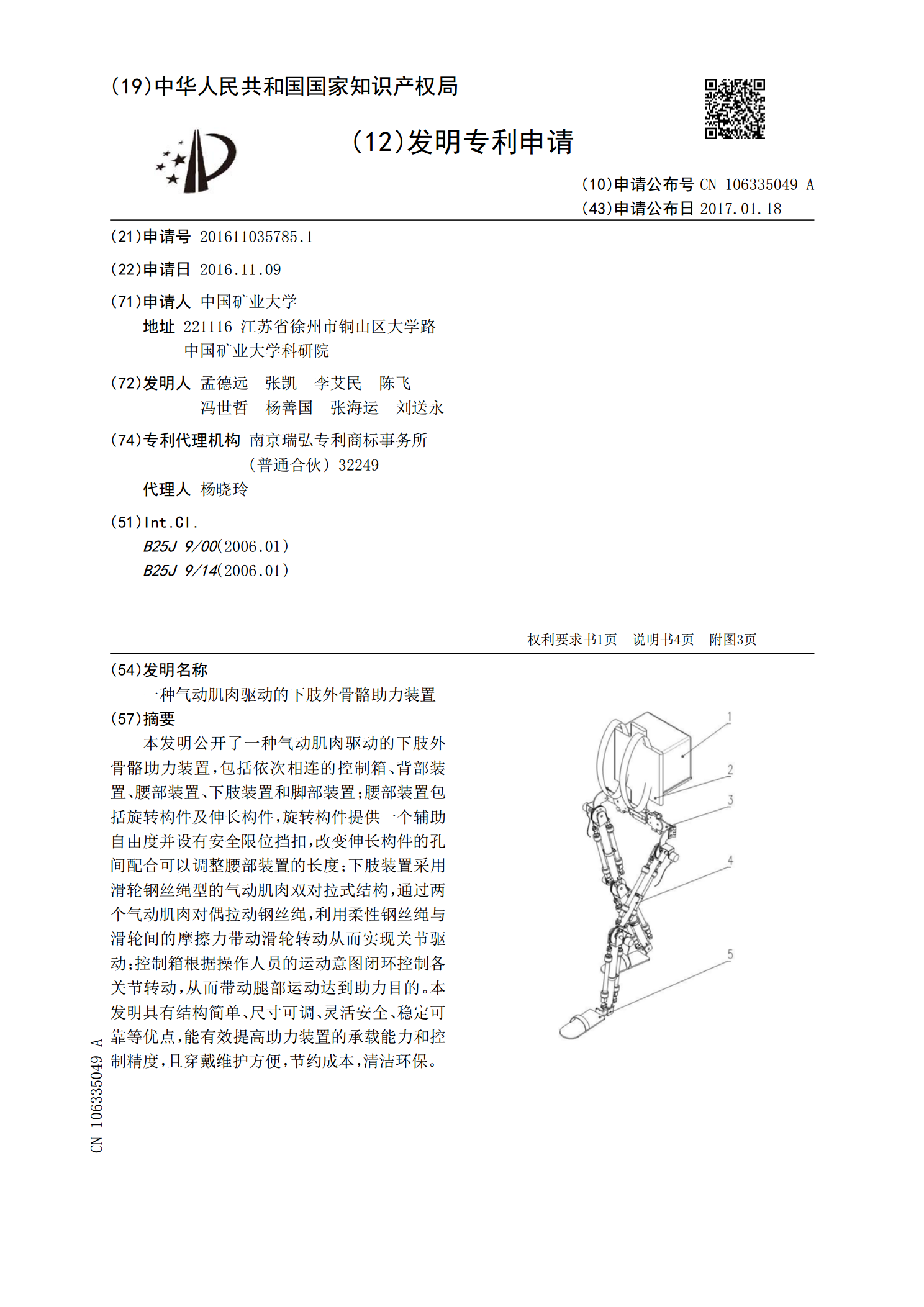
本发明公开了一种气动肌肉驱动的下肢外骨骼助力装置,包括依次相连的控制箱、背部装置、腰部装置、下肢装置和脚部装置;腰部装置包括旋转构件及伸长构件,旋转构件提供一个辅助自由度并设有安全限位挡扣,改变伸长构件的孔间配合可以调整腰部装置的长度;下肢装置采用滑轮钢丝绳型的气动肌肉双对拉式结构,通过两个气动肌肉对偶拉动钢丝绳,利用柔性钢丝绳与滑轮间的摩擦力带动滑轮转动从而实现关节驱动;控制箱根据操作人员的运动意图闭环控制各关节转动,从而带动腿部运动达到助力目的。本发明具有结构简单、尺寸可调、灵活安全、稳定可靠等优点,

下肢外骨骼步态自适应助力控制研究.docx
下肢外骨骼步态自适应助力控制研究1.内容概要本课题“下肢外骨骼步态自适应助力控制研究”旨在探索下肢外骨骼在行走过程中的自适应助力控制机制,以提高穿戴者的行走效率、舒适度和安全性。通过深入研究步态识别、动力学建模、控制算法和系统集成等多个方面,本项目旨在开发一种能够实时适应用户个性特征和行走环境的智能下肢外骨骼控制系统。在内容安排上,本论文首先介绍了下肢外骨骼的基本概念、发展历程和应用前景,为后续研究提供背景知识。论文重点分析了当前下肢外骨骼步态控制领域面临的挑战,如步态识别的准确性、助力控制的实时性和适应