
轮对尺寸在线监测方法.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮对尺寸在线监测方法.pdf
本发明公开了一种轮对尺寸在线检测方法,包括布设传感器、踏面数据分段、数据预处理、坐标变换、数据融合、确定关键踏面数据段、计算轮对尺寸以及判断轮对尺寸是否异常等步骤;本发明设计简单、结构布设方便、计算量小、测量精度高,且实时性强。
浅谈轮对尺寸在线自动监测技术.pdf
浅谈轮对尺寸在线自动监测技术郑州铁路局局车辆检测所张娴摘要:本文简单介绍了目前国内外采用的轮对尺寸检测技术的主要原理,简述了目前国内外已应用的轮对尺寸检测技术系统,并对货车轮对尺寸在线自动监测技术的应用进行了简单的应用展望。关键词:货车车轮监测技术车辆轮对是铁路车辆走行部的重要构件,轮对故障常常导致严重的安全事故,给铁路运输造成重大损失。轮对尺寸超限等轮对故障不但是运输中的安全隐患,而且对铁路的固定设施及车辆结构本身造成了极大的损害。目前,随着货车的重载和提速,车轮磨耗日趋严重,根据生产厂家对C80型敞车
一种有轨电车轮对尺寸在线监测系统及方法.pdf
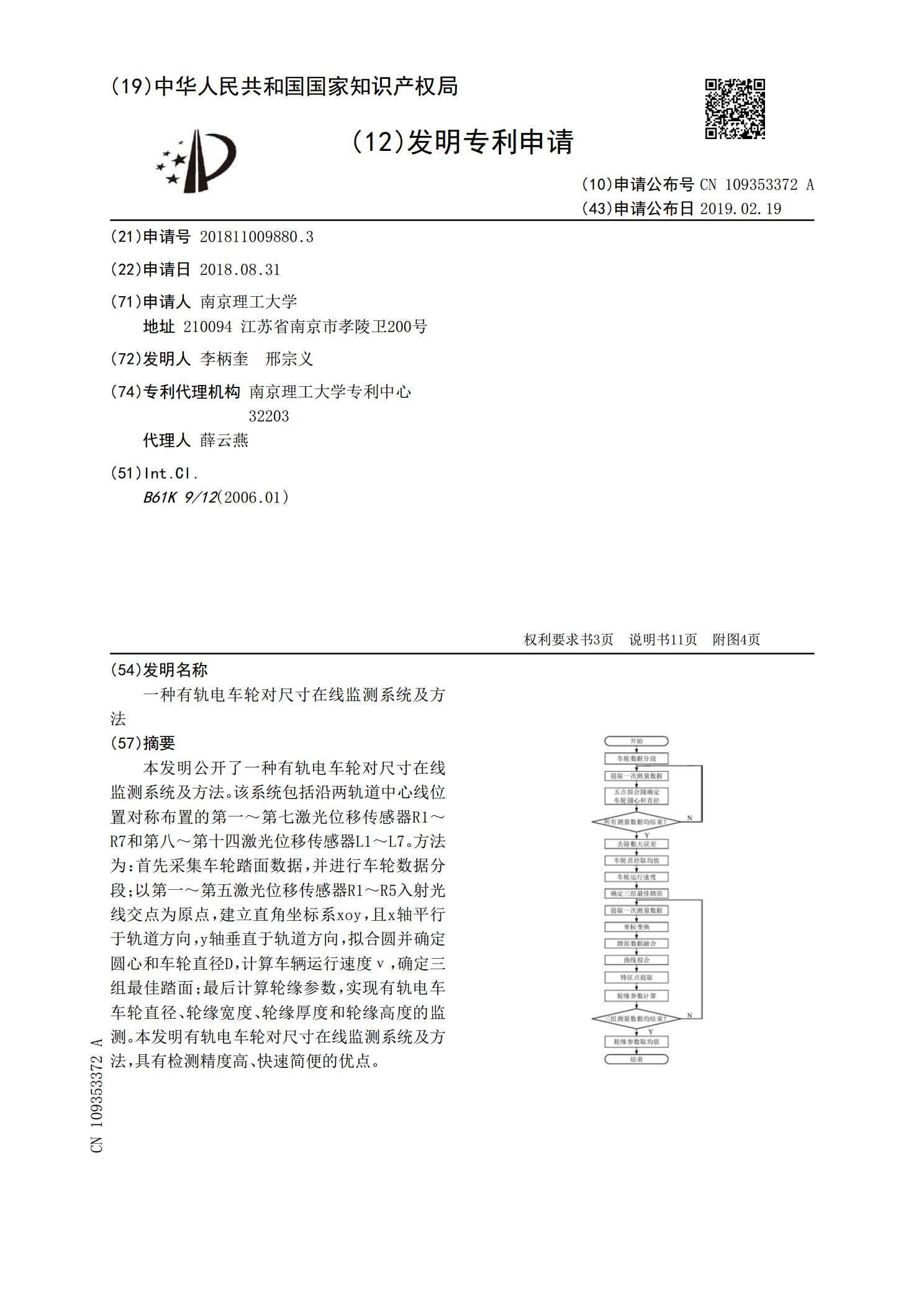
本发明公开了一种有轨电车轮对尺寸在线监测系统及方法。该系统包括沿两轨道中心线位置对称布置的第一~第七激光位移传感器R1~R7和第八~第十四激光位移传感器L1~L7。方法为:首先采集车轮踏面数据,并进行车轮数据分段;以第一~第五激光位移传感器R1~R5入射光线交点为原点,建立直角坐标系xoy,且x轴平行于轨道方向,y轴垂直于轨道方向,拟合圆并确定圆心和车轮直径D,计算车辆运行速度ν,确定三组最佳踏面;最后计算轮缘参数,实现有轨电车车轮直径、轮缘宽度、轮缘厚度和轮缘高度的监测。本发明有轨电车轮对尺寸在线监测系
一种列车轮对尺寸在线检测方法及其系统.pdf
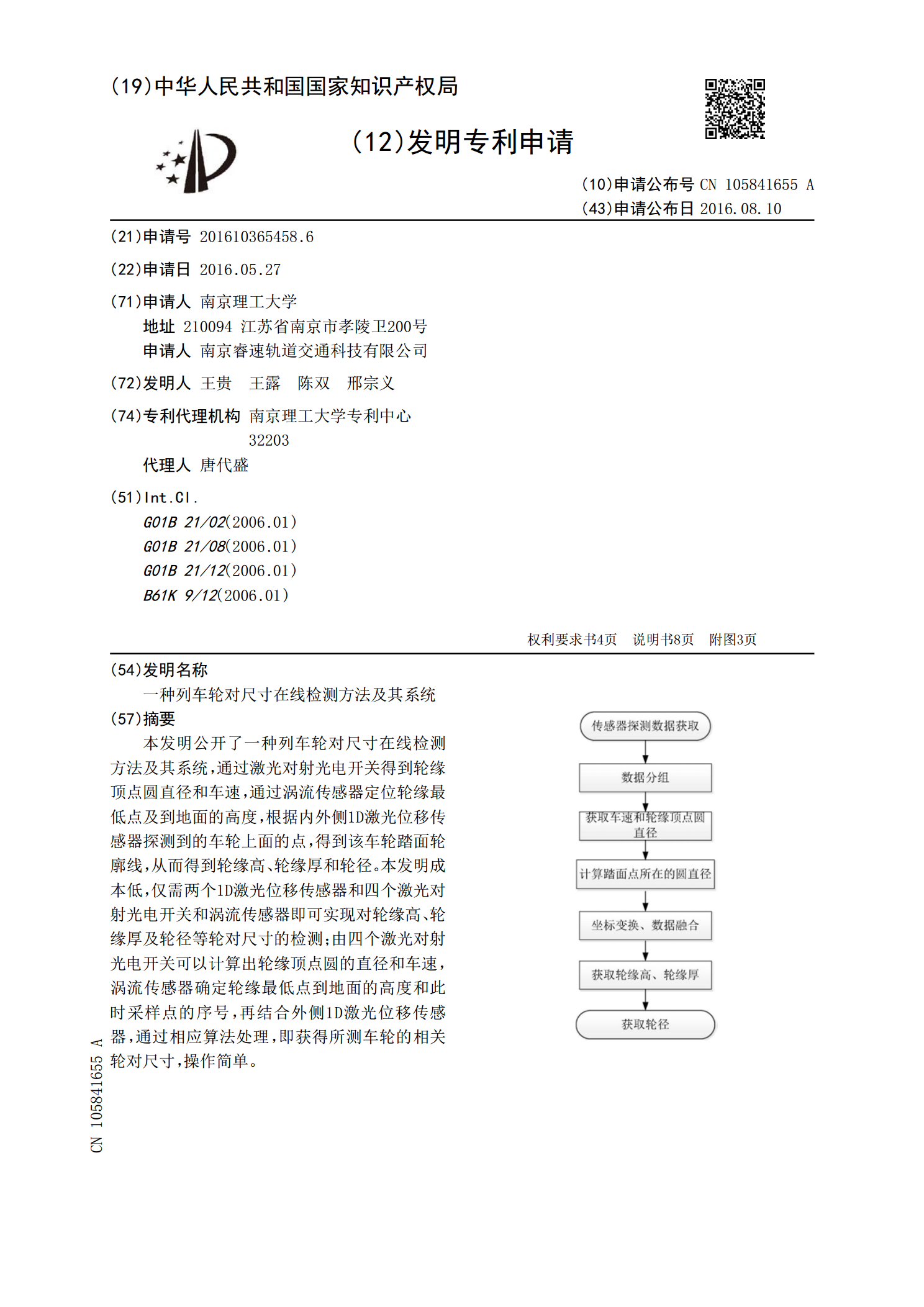
本发明公开了一种列车轮对尺寸在线检测方法及其系统,通过激光对射光电开关得到轮缘顶点圆直径和车速,通过涡流传感器定位轮缘最低点及到地面的高度,根据内外侧1D激光位移传感器探测到的车轮上面的点,得到该车轮踏面轮廓线,从而得到轮缘高、轮缘厚和轮径。本发明成本低,仅需两个1D激光位移传感器和四个激光对射光电开关和涡流传感器即可实现对轮缘高、轮缘厚及轮径等轮对尺寸的检测;由四个激光对射光电开关可以计算出轮缘顶点圆的直径和车速,涡流传感器确定轮缘最低点到地面的高度和此时采样点的序号,再结合外侧1D激光位移传感器,通过

一种非接触式轮对尺寸在线检测方法及系统.pdf
本发明公开一种非接触式轮对尺寸在线检测方法及系统,即沿轨道外侧、内侧分别设置2D激光位移传感器、1D激光位移传感器,沿轨道设置测速传感器,在同一轨道两侧按几何关系布置两个激光对射传感器,传感器分别探测获取轮缘顶点的部分踏面轮廓线、到轨道内侧车轮端面的距离、车轮通过的速度,两个激光对射传感器检测轮缘顶点所在圆的弦长;通过提取车轮通过检测系统的部分踏面轮廓线和1D激光位移传感器到轨道内侧车轮端面的距离按几何关系算出轮缘高和轮缘厚;通过提取两个激光对射传感器处轮缘顶点圆的弦长,得到车轮轮缘顶点所在圆的直径,用轮