
自由二阶非圆齿—偏心非圆齿钵苗移栽夹苗式取苗机构.pdf

元容****少女

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自由二阶非圆齿—偏心非圆齿钵苗移栽夹苗式取苗机构.pdf
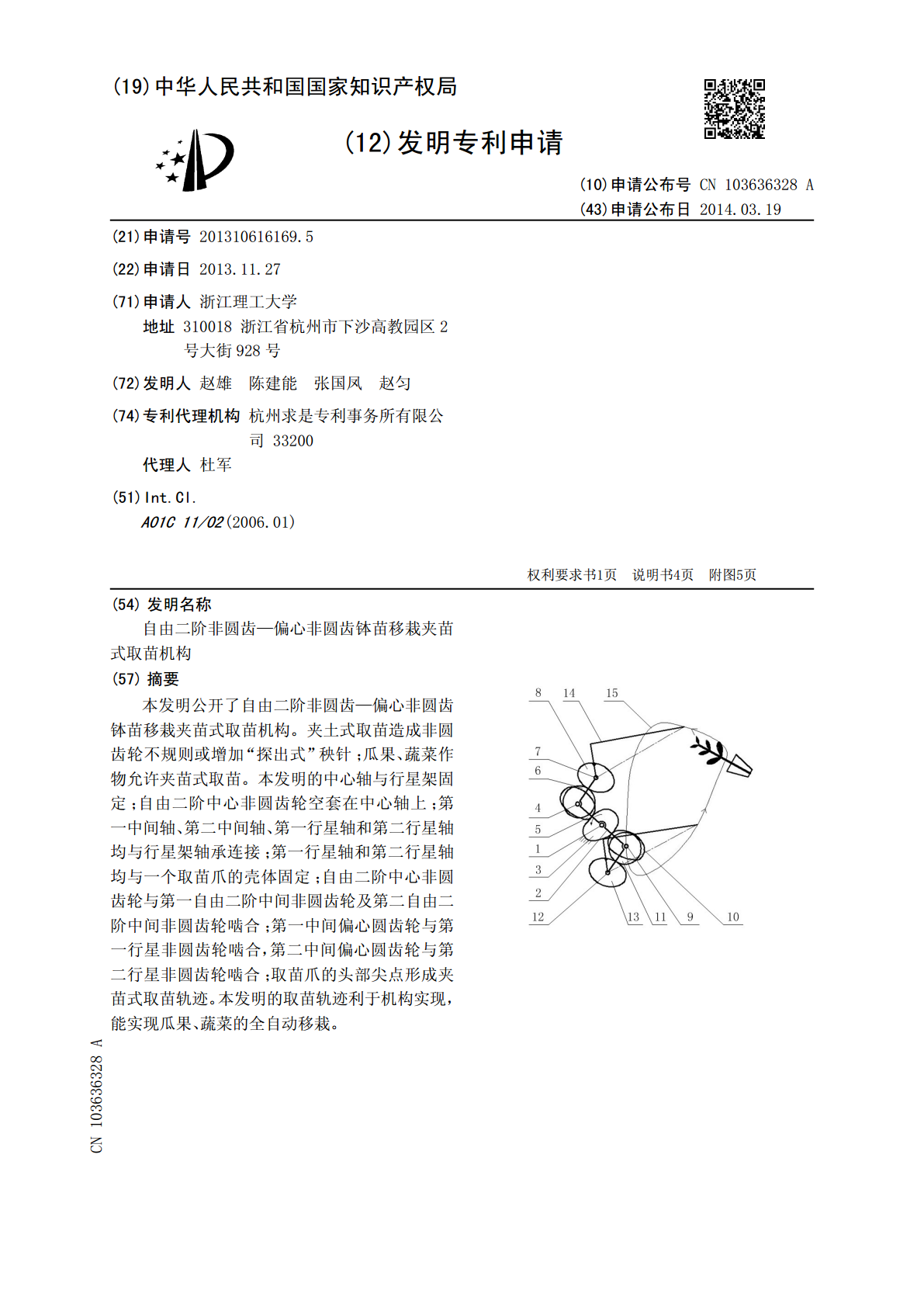
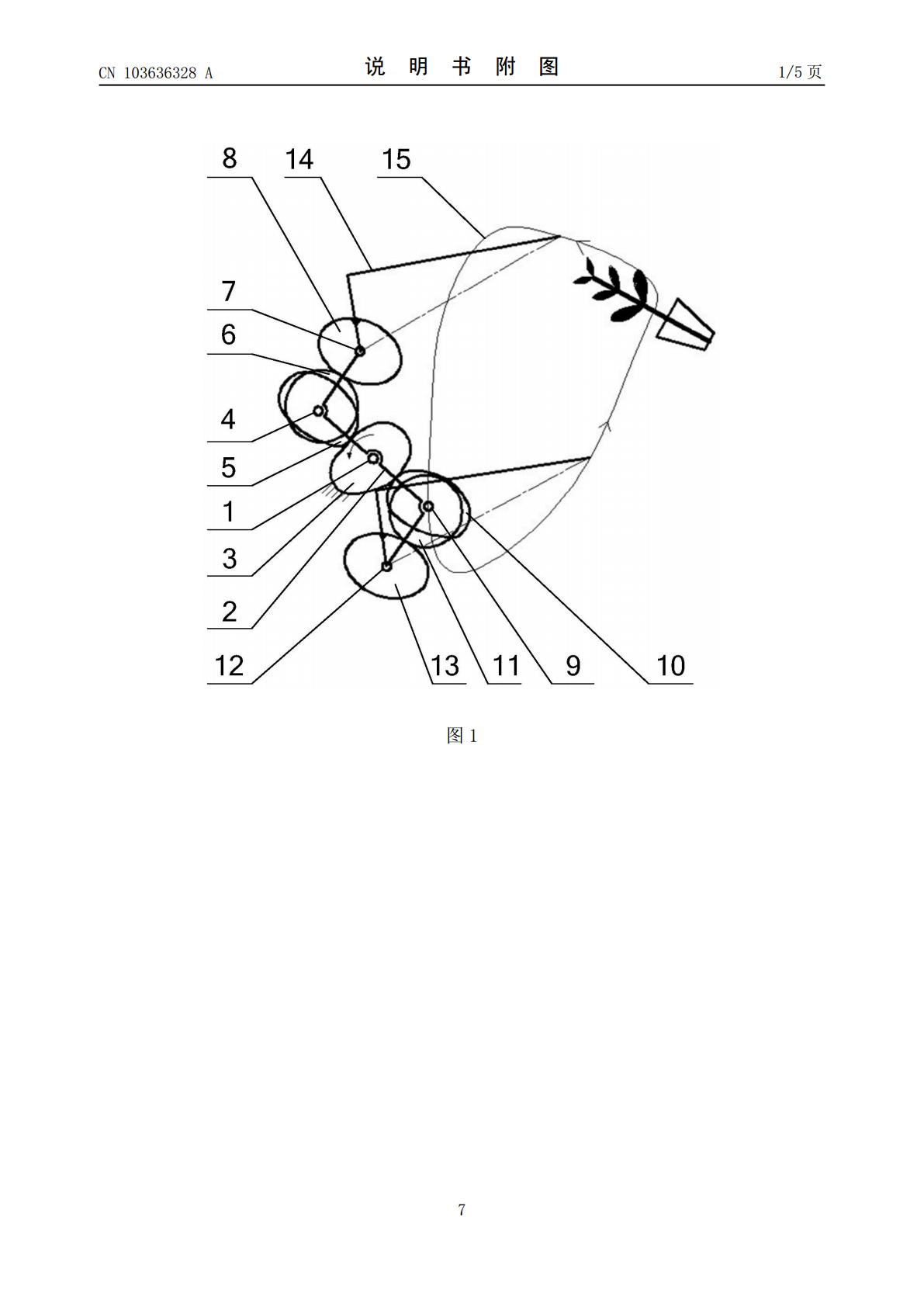
本发明公开了自由二阶非圆齿—偏心非圆齿钵苗移栽夹苗式取苗机构。夹土式取苗造成非圆齿轮不规则或增加“探出式”秧针;瓜果、蔬菜作物允许夹苗式取苗。本发明的中心轴与行星架固定;自由二阶中心非圆齿轮空套在中心轴上;第一中间轴、第二中间轴、第一行星轴和第二行星轴均与行星架轴承连接;第一行星轴和第二行星轴均与一个取苗爪的壳体固定;自由二阶中心非圆齿轮与第一自由二阶中间非圆齿轮及第二自由二阶中间非圆齿轮啮合;第一中间偏心圆齿轮与第一行星非圆齿轮啮合,第二中间偏心圆齿轮与第二行星非圆齿轮啮合;取苗爪的头部尖点形成夹苗式取

自由二阶非圆齿—变形椭圆齿钵苗移栽夹苗式取苗机构.pdf
本发明公开了自由二阶非圆齿—变形椭圆齿钵苗移栽夹苗式取苗机构。夹土式取苗造成非圆齿轮不规则或增加“探出式”秧针;瓜果、蔬菜作物允许夹苗式取苗。本发明的中心轴与行星架固定;自由二阶中心非圆齿轮空套在中心轴上;第一中间轴、第二中间轴、第一行星轴和第二行星轴均与行星架轴承连接;第一行星轴和第二行星轴均与一个取苗爪的壳体固定;自由二阶中心非圆齿轮与第一自由二阶中间非圆齿轮及第二自由二阶中间非圆齿轮啮合;第一中间变形椭圆齿轮与第一行星变形椭圆齿轮啮合,第二中间变形椭圆齿轮与第二行星变形椭圆齿轮啮合;取苗爪的头部尖点

二阶傅里叶齿—偏心非圆齿钵苗移栽夹苗式取苗机构.pdf
本发明公开了二阶傅里叶齿—偏心非圆齿钵苗移栽夹苗式取苗机构。夹土式取苗造成非圆齿轮不规则或增加“探出式”秧针;瓜果、蔬菜作物允许夹苗式取苗。本发明的中心轴与行星架固定;二阶傅里叶中心非圆齿轮空套在中心轴上;第一中间轴、第二中间轴、第一行星轴和第二行星轴均与行星架轴承连接;第一行星轴和第二行星轴均与一个取苗爪的壳体固定;二阶傅里叶中心非圆齿轮同时与第一二阶傅里叶中间非圆齿轮及第二二阶傅里叶中间非圆齿轮啮合;第一中间偏心圆齿轮与第一行星非圆齿轮啮合,第二中间偏心圆齿轮与第二行星非圆齿轮啮合;取苗爪的头部尖点形
自由二阶非圆齿—傅里叶齿钵苗移栽夹苗式取苗机构.pdf
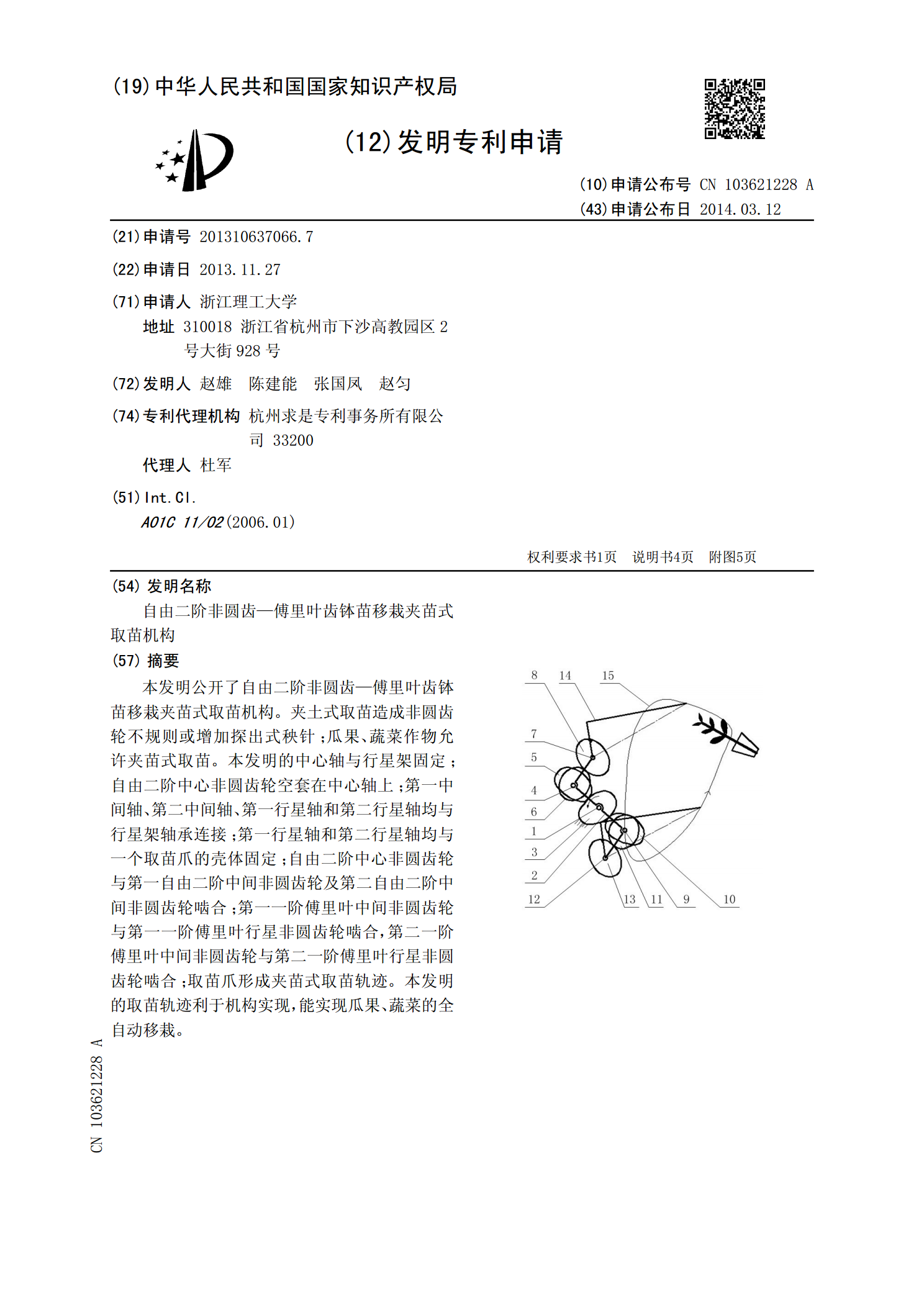
本发明公开了自由二阶非圆齿—傅里叶齿钵苗移栽夹苗式取苗机构。夹土式取苗造成非圆齿轮不规则或增加探出式秧针;瓜果、蔬菜作物允许夹苗式取苗。本发明的中心轴与行星架固定;自由二阶中心非圆齿轮空套在中心轴上;第一中间轴、第二中间轴、第一行星轴和第二行星轴均与行星架轴承连接;第一行星轴和第二行星轴均与一个取苗爪的壳体固定;自由二阶中心非圆齿轮与第一自由二阶中间非圆齿轮及第二自由二阶中间非圆齿轮啮合;第一一阶傅里叶中间非圆齿轮与第一一阶傅里叶行星非圆齿轮啮合,第二一阶傅里叶中间非圆齿轮与第二一阶傅里叶行星非圆齿轮啮合
二阶傅里叶节曲线非圆齿钵苗移栽夹苗式取苗机构.pdf
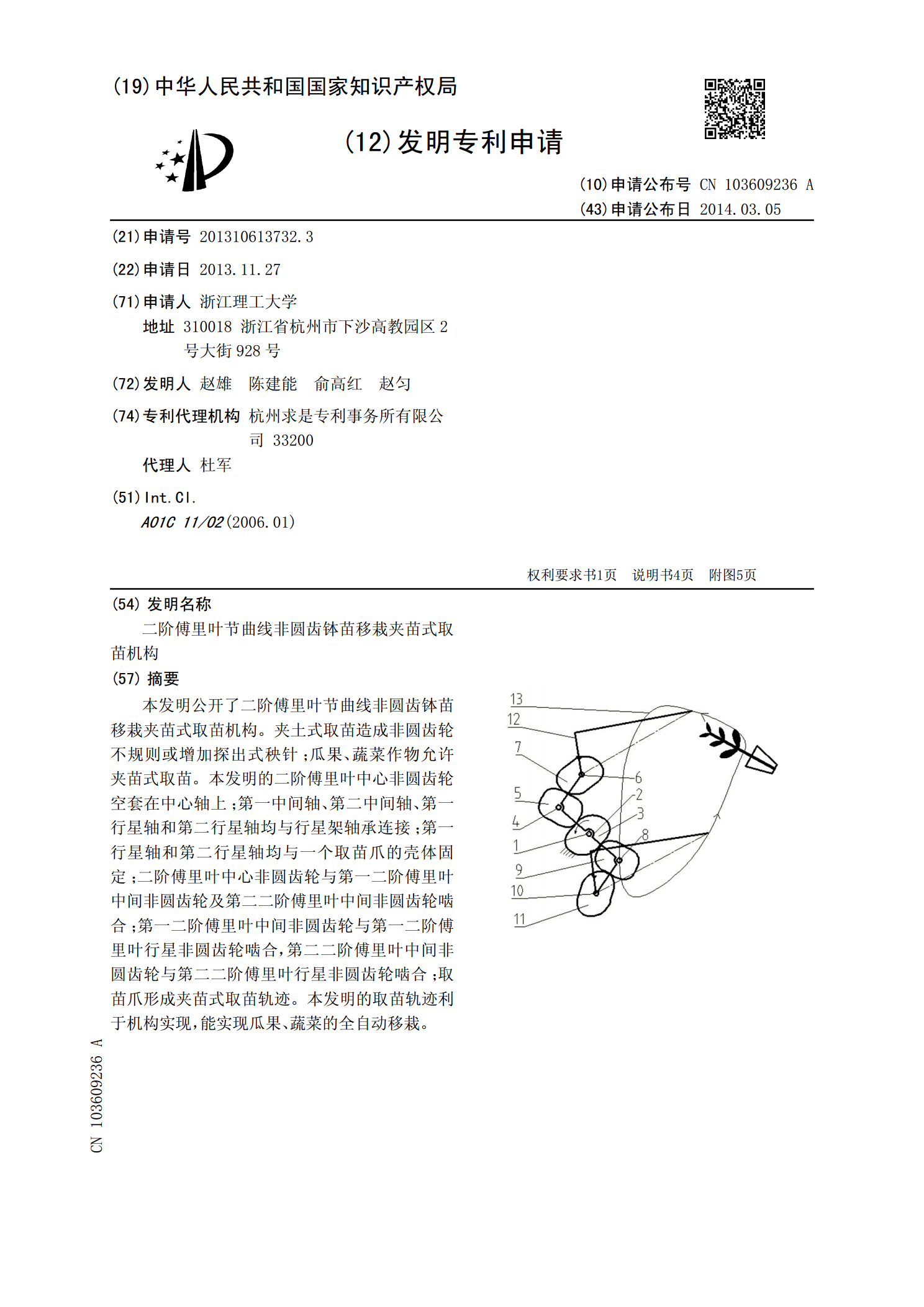
本发明公开了二阶傅里叶节曲线非圆齿钵苗移栽夹苗式取苗机构。夹土式取苗造成非圆齿轮不规则或增加探出式秧针;瓜果、蔬菜作物允许夹苗式取苗。本发明的二阶傅里叶中心非圆齿轮空套在中心轴上;第一中间轴、第二中间轴、第一行星轴和第二行星轴均与行星架轴承连接;第一行星轴和第二行星轴均与一个取苗爪的壳体固定;二阶傅里叶中心非圆齿轮与第一二阶傅里叶中间非圆齿轮及第二二阶傅里叶中间非圆齿轮啮合;第一二阶傅里叶中间非圆齿轮与第一二阶傅里叶行星非圆齿轮啮合,第二二阶傅里叶中间非圆齿轮与第二二阶傅里叶行星非圆齿轮啮合;取苗爪形成夹