
一种无人机多重叠遥感影像的建筑物轮廓线提取方法.pdf

小寄****淑k

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人机多重叠遥感影像的建筑物轮廓线提取方法.pdf
一种无人机多重叠遥感影像的建筑物轮廓线提取方法,包括利用空三结合密集匹配的方法生成三维点云,并对点云进行滤波处理,从其中检测出建筑物。对检测的建筑删除墙面后,从建筑物顶面信息提取建筑物粗轮廓。建筑物粗轮廓作为缓冲区叠加拼接影像上,利用建筑物粗轮廓作为形状先验信息,在缓冲区内用水平集算法进行演化,最后得到建筑物精确轮廓。本发明充分利用了多重叠影像生成的点云三维信息,同时结合高分辨率遥感影像的高精度几何信息,不但显著提高了建筑物轮廓提取的精度,而且降低了方法的复杂度。
一种航空遥感影像的建筑物轮廓线提取方法.pdf
本发明提出一种航空遥感影像的建筑物轮廓线提取方法,利用颜色不变量算法检测出航空遥感影像中建筑物的阴影区域,并对阴影区域进行图像细化,将细化的结果作为建筑物的背景区域;以阴影区域的质心为起点向太阳高度角反方向搜索,获得建筑物部分的区域,将这个区域作为建筑物的目标区域;利用线性迭代聚类法对航空影像进行超像素分割;基于分别获得的背景区域和目标区域,利用最大相似度进行超像素划分块的合并,提取建筑物的轮廓线。本发明利用面向对象分割思想和影像中目标的上下文信息进行建筑物轮廓线的提取,不但显著提高了建筑物轮廓提取的精度

一种从卫星遥感影像中提取建筑物轮廓的方法.pdf
本发明提供了一种从卫星遥感影像中提取建筑物轮廓的方法,包括:对同一区域的全色波段和多光谱波段影像进行融合,生成多光谱融合影像;对融合影像进行对比度增强处理;对融合影像进行影像分割,创建影像对象;对影像对象进行基于光谱特征的监督分类,获得不透水性地类分布图;针对不透水性地类分布图,利用模糊逻辑分类器,结合光谱属性、空间属性、纹理属性和上下文属性的特征构建知识规则,并按知识规则进行分类,提取出建筑物屋顶类。本发明能够针对不规整或复杂的城区场景实现建筑物轮廓提取,无需辅助数据,在分类中不必对屋顶类之外的其他不透

一种基于非线性尺度滤波的遥感影像建筑物提取方法.pdf
本发明涉及一种基于非线性尺度滤波的遥感影像建筑物提取方法。包括如下步骤:步骤1,分离影像波段;步骤2,非线性尺度滤波;步骤3,判断迭代停止条件;步骤4,二值化处理;步骤5,波段叠加。可克服目前高空间分辨率遥感影像中建筑物提取困难的问题,充分利用遥感影像的光谱特征,可以检测遥感影像中的建筑物目标,且准确地保留其边缘,无需人工干预,自动化程度高。
一种基于TM-高分遥感影像融合的建筑物提取方法.pdf
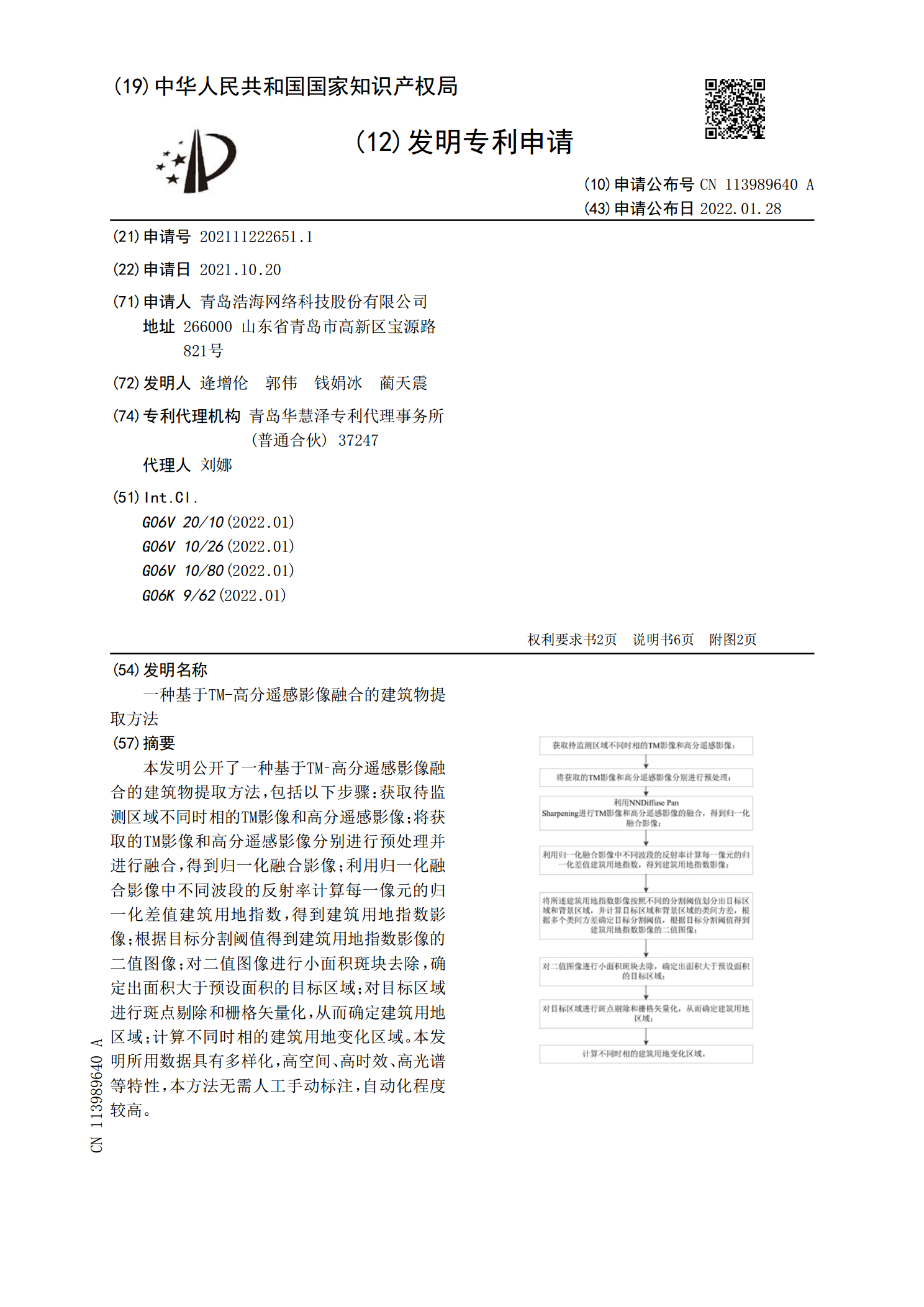
本发明公开了一种基于TM‑高分遥感影像融合的建筑物提取方法,包括以下步骤:获取待监测区域不同时相的TM影像和高分遥感影像;将获取的TM影像和高分遥感影像分别进行预处理并进行融合,得到归一化融合影像;利用归一化融合影像中不同波段的反射率计算每一像元的归一化差值建筑用地指数,得到建筑用地指数影像;根据目标分割阈值得到建筑用地指数影像的二值图像;对二值图像进行小面积斑块去除,确定出面积大于预设面积的目标区域;对目标区域进行斑点剔除和栅格矢量化,从而确定建筑用地区域;计算不同时相的建筑用地变化区域。本发明所用数据