
并联柔顺恒力平台的构建与静力学特性分析的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

并联柔顺恒力平台的构建与静力学特性分析的开题报告.docx
并联柔顺恒力平台的构建与静力学特性分析的开题报告一、研究背景随着机器人应用越来越广泛,对于机器人的运动控制、力觉、力控等要求越来越高,特别是在工业生产中,需要机器人处理的工件、物品多样化、模型复杂,机器人对于环境和控制的要求也非常高。因此,开发高性能的姿态控制系统和力控制系统成为机器人研究的一个重要方向。在工业机器人操作中,由于工件的加工特性和环境工作条件的不同,机器人往往需要调整其控制参数和运动轨迹以适应实际工作需求,在实际工程应用中,精度的要求对于控制系统的稳定性和精度要求都比较高。因此,当前很多关于
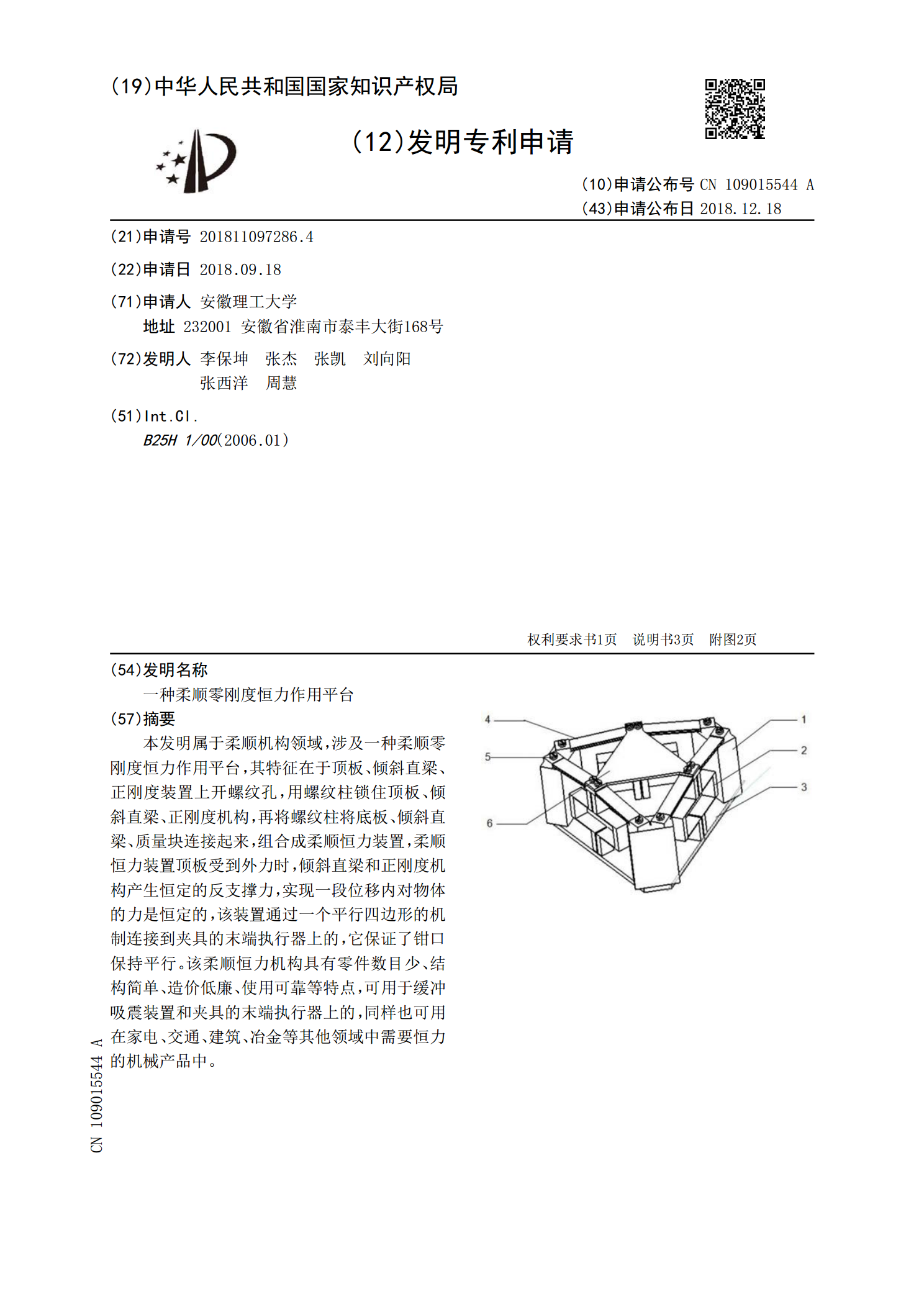
一种柔顺零刚度恒力作用平台.pdf
本发明属于柔顺机构领域,涉及一种柔顺零刚度恒力作用平台,其特征在于顶板、倾斜直梁、正刚度装置上开螺纹孔,用螺纹柱锁住顶板、倾斜直梁、正刚度机构,再将螺纹柱将底板、倾斜直梁、质量块连接起来,组合成柔顺恒力装置,柔顺恒力装置顶板受到外力时,倾斜直梁和正刚度机构产生恒定的反支撑力,实现一段位移内对物体的力是恒定的,该装置通过一个平行四边形的机制连接到夹具的末端执行器上的,它保证了钳口保持平行。该柔顺恒力机构具有零件数目少、结构简单、造价低廉、使用可靠等特点,可用于缓冲吸震装置和夹具的末端执行器上的,同样也可用在
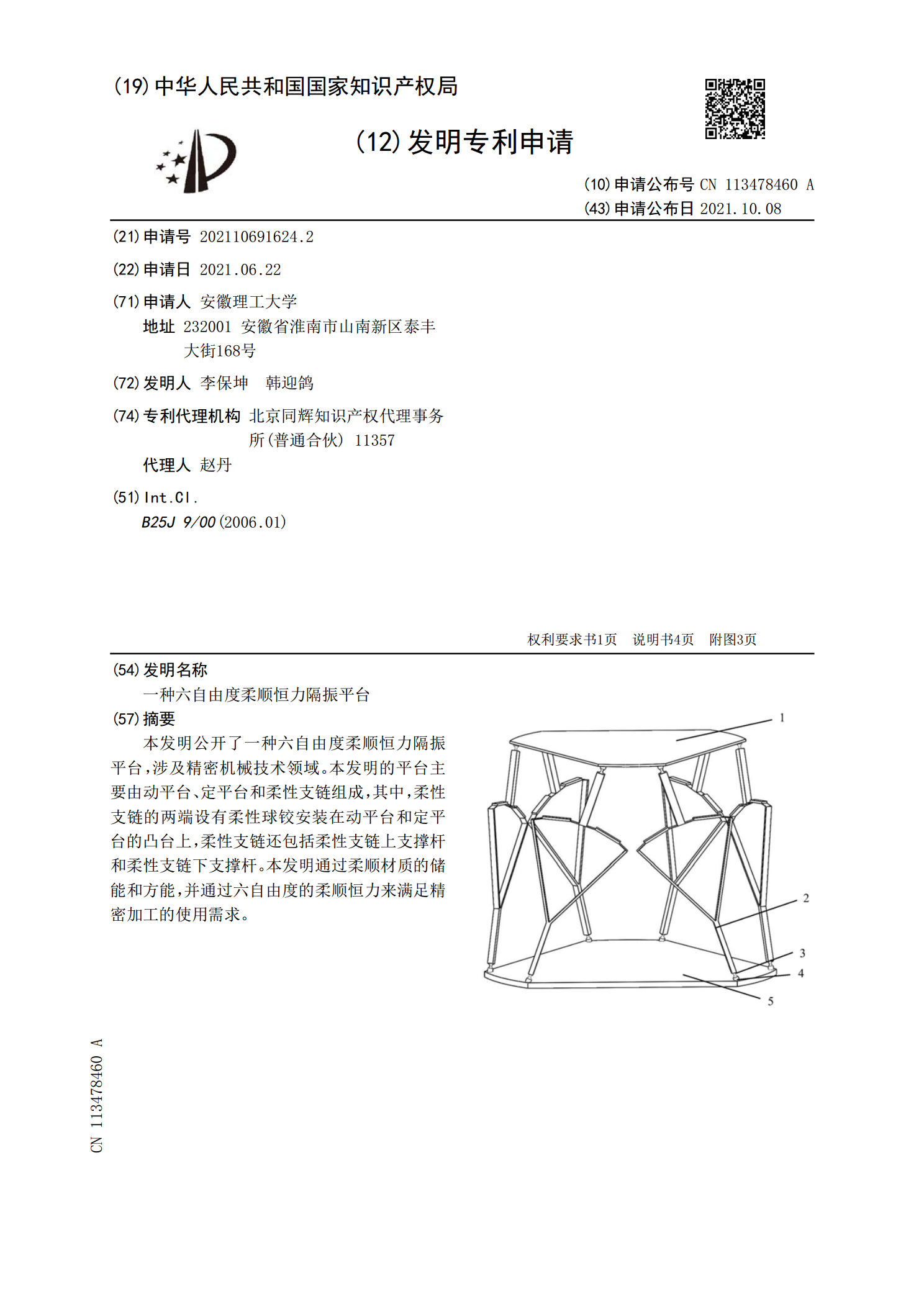
一种六自由度柔顺恒力隔振平台.pdf
本发明公开了一种六自由度柔顺恒力隔振平台,涉及精密机械技术领域。本发明的平台主要由动平台、定平台和柔性支链组成,其中,柔性支链的两端设有柔性球铰安装在动平台和定平台的凸台上,柔性支链还包括柔性支链上支撑杆和柔性支链下支撑杆。本发明通过柔顺材质的储能和方能,并通过六自由度的柔顺恒力来满足精密加工的使用需求。

汉语词法分析平台的构建的开题报告.docx
汉语词法分析平台的构建的开题报告一、项目简介本文所述的项目旨在建立一个汉语词法分析平台,为用户提供高效、准确、稳定的汉语语言处理工具。汉语词法分析是处理中文字符在组织结构上的分析和处理过程,目的是识别并标识出语言中的不同词汇及其词性。汉语词法分析平台能够根据句子中的单词、标点符号和语法将整个语句进行分析处理,并输出分析结果。本项目将主要包括如下几方面内容:(1)搭建汉语词库:收集词汇表中的词汇及其对应的词性标记信息,用于词性标注和词汇匹配。(2)实现分词功能:通过分离句子中的标点符号和单词,将句子进行分词

拓扑优化法设计柔顺恒力机构的综述报告.docx
拓扑优化法设计柔顺恒力机构的综述报告柔顺恒力机构(CompliantConstantForceMechanisms,CCFMs)由于其优异的力学性能,在工业制造、医疗保健、航空航天等领域具有广泛的应用。CCFMs通常由刚度较低的弹性材料构成,能够在一定的位移条件下提供恒定的力。然而,CCFMs的设计与制造并不容易,目前常见的设计方法包括经验设计和试错设计,这些设计方法在成本、效率和准确性方面存在不足。为了克服传统设计方法的不足,拓扑优化法已成为设计CCFMs的热门方法。拓扑优化法通过在CCFM结构中优化材