
船舶吃水动态检测方法的研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船舶吃水动态检测方法的研究的综述报告.docx
船舶吃水动态检测方法的研究的综述报告船舶吃水动态检测方法的研究至关重要,因为吃水是船舶航行安全的关键指标之一。随着科技进步和经济发展,越来越多的新型船舶投入使用,这些船舶吃水、载荷等特性都会发生变化。为了确保船舶安全性和航行性能,需要对船舶吃水进行动态监测。本文将对目前船舶吃水动态检测方法进行综述,总结各种方法的优缺点,为船舶吃水动态检测提供参考。传统的吃水测量方法包括使用固定深度传感器、液位计和舵角传感器,这些传感器可以固定安装在船舶船体上,测量船舶吃水、液位和舵角等参数,但是这些传感器无法提供船舶吃水

基于视频的船舶吃水线检测方法的研究的综述报告.docx
基于视频的船舶吃水线检测方法的研究的综述报告船舶吃水线检测是航行安全的重要保证。而基于视频的吃水线检测方法因为其高效、易获取数据等优点,被广泛应用于航行安全领域。本文将对基于视频的吃水线检测方法进行综述。一、吃水线检测的意义及应用吃水线是船舶上下水面的交界处,如图1所示。吃水线的位置对于船舶的航行和载重能力都有重要的影响。在航行中,吃水线的偏移会影响船舶的稳定性、速度和燃油消耗等。因此,吃水线的准确检测对于船舶航行安全非常重要。基于视频的吃水线检测是一种常用的检测方法。通过拍摄船舶在水中的视频,并利用计算
船舶吃水动态检测系统及检测方法.pdf
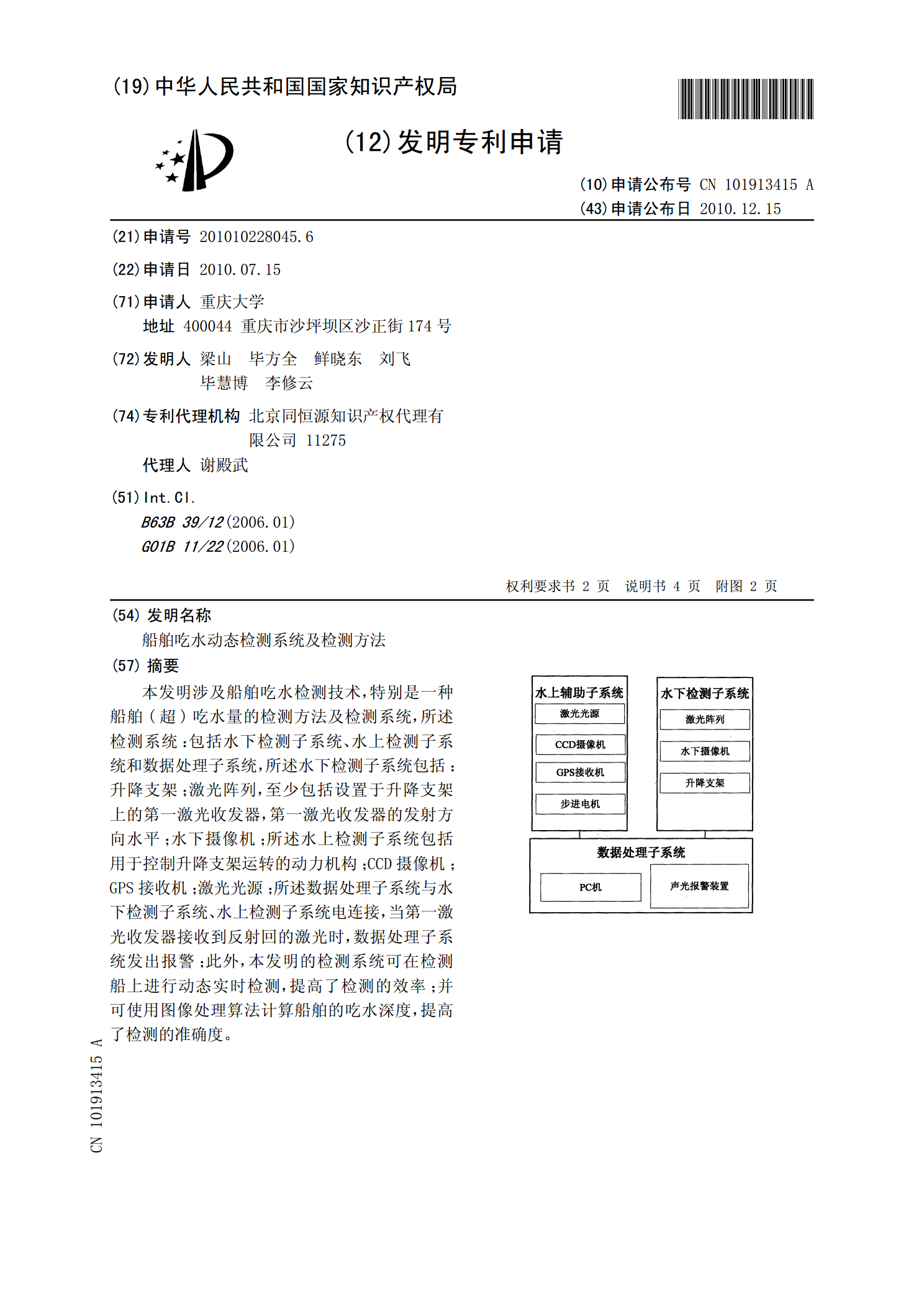
本发明涉及船舶吃水检测技术,特别是一种船舶(超)吃水量的检测方法及检测系统,所述检测系统:包括水下检测子系统、水上检测子系统和数据处理子系统,所述水下检测子系统包括:升降支架;激光阵列,至少包括设置于升降支架上的第一激光收发器,第一激光收发器的发射方向水平;水下摄像机;所述水上检测子系统包括用于控制升降支架运转的动力机构;CCD摄像机;GPS接收机;激光光源;所述数据处理子系统与水下检测子系统、水上检测子系统电连接,当第一激光收发器接收到反射回的激光时,数据处理子系统发出报警;此外,本发明的检测系统可在检

船舶吃水检测系统的设计的综述报告.docx
船舶吃水检测系统的设计的综述报告船舶吃水检测系统是一种测量船舶吃水深度的系统,常见于水运行业、海事、港口等领域。这种系统能够实时测量船舶的吃水深度,帮助船舶驾驶员掌握船舶的实际位置和荷载情况。船舶吃水检测系统的设计主要包括传感器的选择、信号采集与传输、显示与分析等方面。下面将逐一介绍。传感器的选择吃水深度传感器是船舶吃水检测系统的核心部件,其性能直接影响到系统的准确性和稳定性。常见的吃水深度传感器包括静态压力传感器、获得成像传感器、超声波传感器和拉线传感器等。静态压力传感器是测量水深的最常用的传感器之一,

船舶水尺吃水值检测方法研究的中期报告.docx
船舶水尺吃水值检测方法研究的中期报告本次中期报告主要就船舶水尺吃水值检测方法进行研究和探讨,并对目前研究进展进行总结和分析。一、研究背景船舶水尺是测量船体吃水的一种重要工具,通常用于测量船舶的高度、位移和吃水等参数。因此,在船舶设计、建造和导航等方面都有着重要的作用。但是,由于各种因素的影响,如船舶载货量、季节和水深等因素都会导致船舶水尺读数的不准确性,这可能对船舶的安全性和经济性造成影响。因此,我们需要开发出一种更加准确和可靠的船舶水尺吃水值检测方法。二、研究进展目前,已经有一些关于船舶水尺吃水值检测方