
一种输电线路绝缘子单兵巡检工具.pdf

佳晨****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种输电线路绝缘子单兵巡检工具.pdf
本发明公开了一种输电线路绝缘子单兵巡检工具,包括安装在横担上部的动力模块,与动力模块相连且在绝缘子串上移动的检测模块,还包括与动力模块和检测模块进行无线通信的手持终端模块;动力模块,包括安装在横担上的机架和导线轮固定模块,机架上固定安装有牵引器和滚筒,滚筒上绕装有牵引绳,牵引绳在牵引器的作用下带动与之相连的检测模块移动;检测模块,包括与牵引绳相连的环形机架,环形机架上固定连接有导向条,导向条上安装有绝缘子检测模块本体和绝缘子检测单元;手持终端模块,包括手持终端设备和与其相连的通信模块三。本发明结构简单、便

一种更换输电线路直线绝缘子专用工具.pdf
本发明属于绝缘子专用工具领域,尤其是一种更换输电线路直线绝缘子专用工具,针对现存在的吊装设备多为单个挂钩,在吊装过程中经常会出现受力不均匀的情况,同时吊装设备多使用绳索进行吊装,吊装过程中会出现绳索缠绕的问题,现提出如下方案,其包括设备本体,所述设备本体为中空结构,所述设备本体的内壁之间活动设有转动轴,所述转动轴上套设有第一齿轮和第二齿轮,且第二齿轮的数量为两个,所述第二齿轮对称设于第一齿轮的两侧,所述设备本体的内壁一侧上设有转动电机,所述转动电机通过输出轴连接有转轴,本发明结构合理,生产成本低,能够保证
一种输电线路巡检装置.pdf
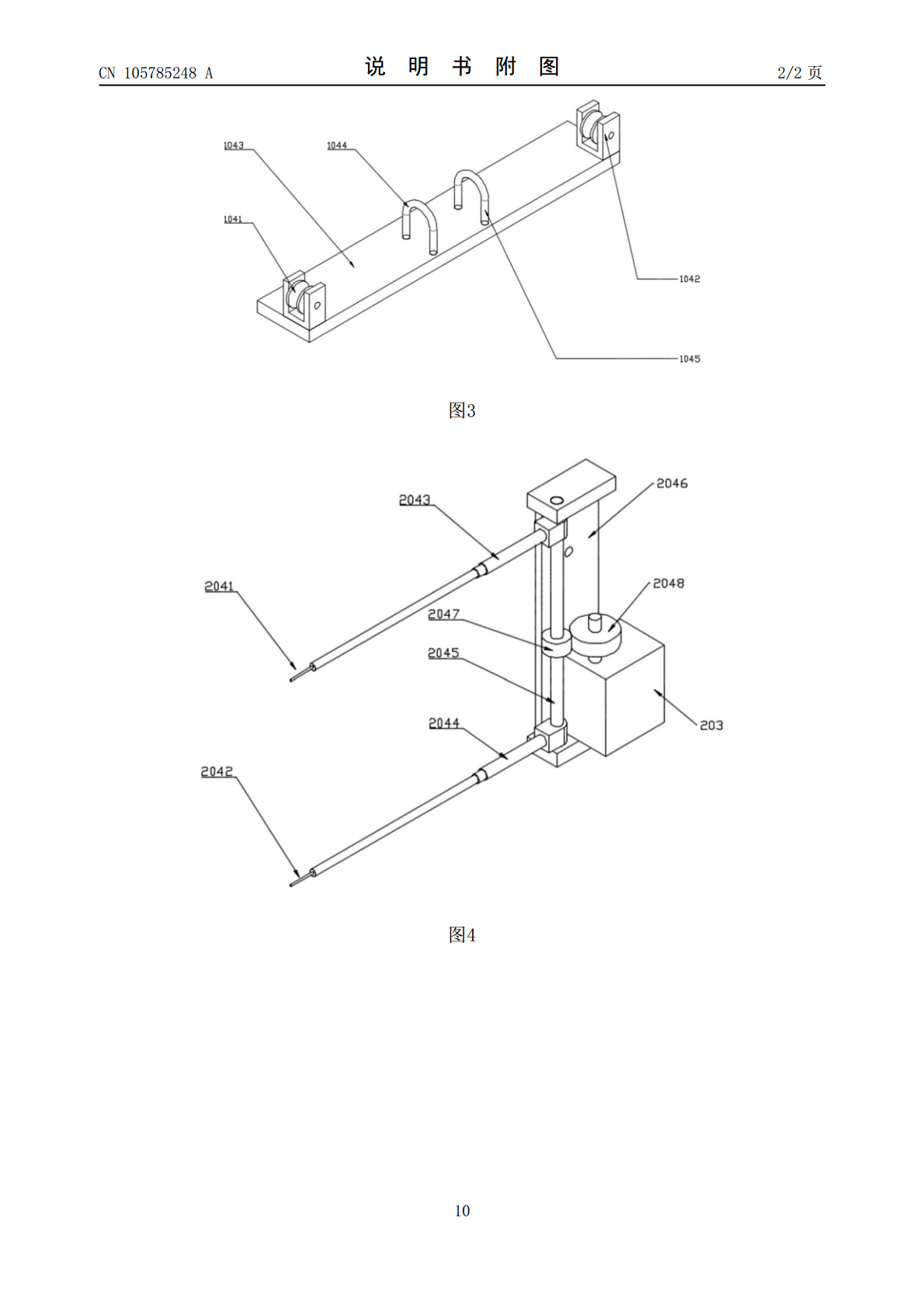
本发明公开了一种输电线路巡检装置。将滑轨固定在安装架;并将行走机构可移动设置于滑轨;以及将用于检测输电线的检测机构设置于行走机构;电源系统用于向行走机构和检测机构提供电能。通过上述公开的输电线路巡检装置,电源系统为行走机构和检测机构提供电能,以确保行走机构能够沿滑轨移动,进而在行走机构沿滑轨移动时,保证检测机构能够对输电线进行检测,当输电线存在隐患时,检测机构能够及时发现输电线的隐患,并通过工作人员及时对存在输电线的隐患进行排除,以避免输电线发生事故,本发明相较于现有人力巡检输电线路,本发明能够有效降低人
一种输电线路巡检装置.pdf
本发明公开了一种输电线路巡检装置,包括箱体,所述箱体内部下方有电缆通过,所述电缆上方和下方均设有滑轮通道,所述滑轮通道上设有滑轮,所述滑轮中心与滑轮转轴固定连接,所述滑轮与电缆接触,所述上方的滑轮通道中心设有检测装置,所述箱体内部上方左侧与电池盒固定连接,所述箱体内部上方右侧与控制器固定连接,所述控制器上方位置设有第二电机,所述第二电机与箱体内侧面固定连接,所述第二电机与横向旋转轴一端固定连接,所述横向旋转轴穿过箱体,所述横向旋转轴上设有第二轴承,所述第二轴承与箱体固定连接。该发明通过检测装置的设置实现了

输电线路绝缘子零值检测专用工具.pdf
输电线路绝缘子零值检测专用工具,包括智能检测仪,智能检测仪的一侧安装伸缩杆,伸缩杆的一端与智能检测仪连接,伸缩杆的另一端连接探针连接板,探针连接板与伸缩杆铰接,探针连接板的侧部安装两个探针,两个探针连接导线,本发明缩短了绝缘子零值检测工作的时间,减少了塔上作业人员,增加了人员利用率,提高了工作效率;塔上作业人员不需要出瓷瓶操作,降低工作人员在高空作业滞留时间和操作风险,提高了工作的安全系数。