
法兰直管的焊接系统.pdf

努力****骞北

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
法兰直管的焊接系统.pdf
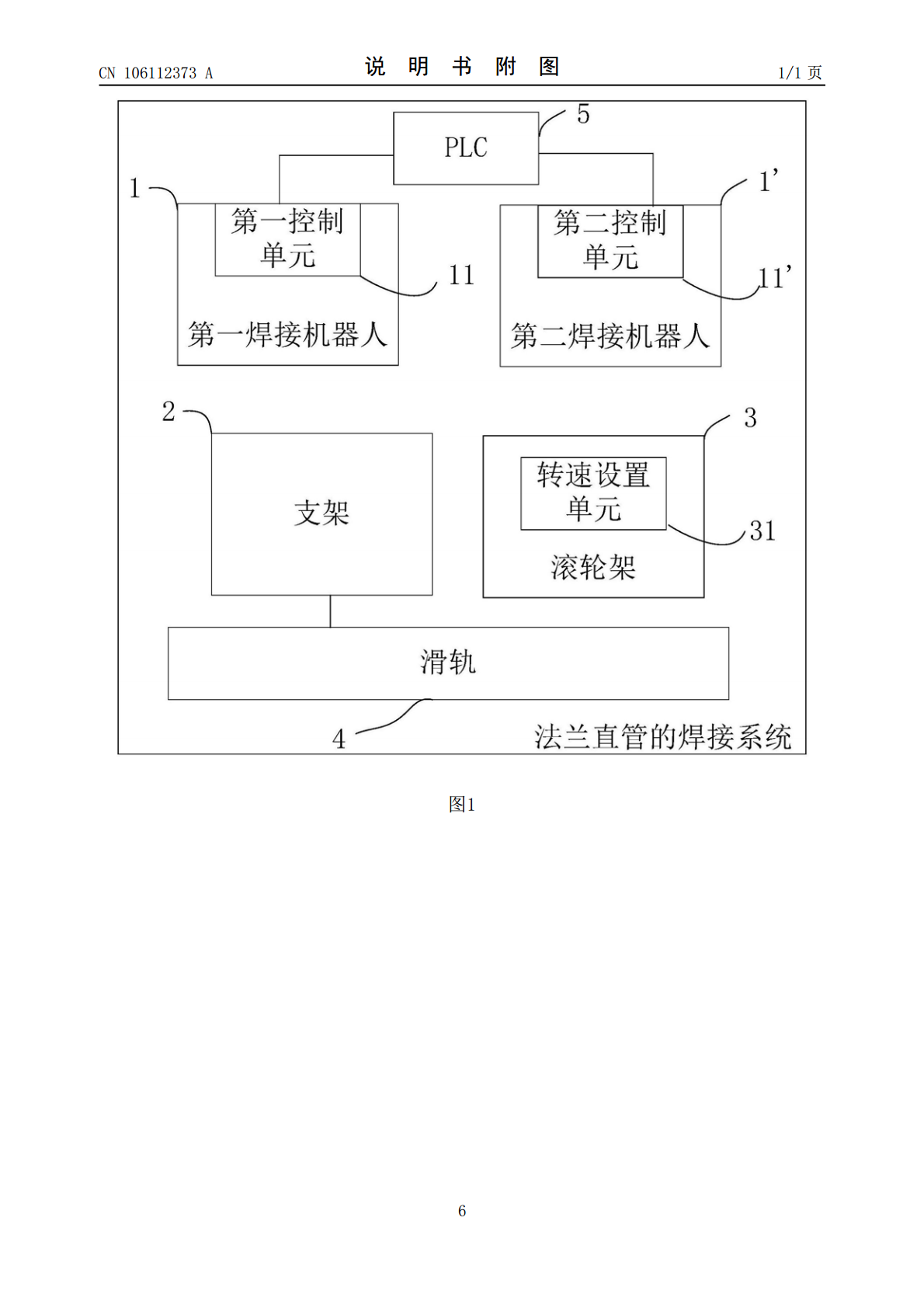
本发明公开了一种法兰直管的焊接系统,包括两个焊接机器人、支架、滚轮架和PLC,所述焊接机器人包括控制单元,所述PLC分别与所述两个焊接机器人的所述控制单元电连接;所述支架用于支撑待焊法兰直管的两端;所述滚轮架用于带动所述待焊法兰直管转动;所述两个焊接机器人分别用于焊接所述待焊法兰直管的两端;所述PLC用于通过所述控制单元控制所述两个焊接机器人同步焊接。本发明提供的法兰直管的焊接系统避免了由于分先后焊接待焊接法兰直管的两端必须在焊接车间调换法兰直管方向而引起的焊接效率低、存在安全隐患的问题,有效地提高了焊接

用于直管的焊接系统.pdf
本发明公开了一种用于直管的焊接系统。其包括有滚轮支撑装置,所述滚轮支撑装置支撑所述直管并带动所述直管绕轴线旋转,所述焊接系统还包括有:轴向定位装置,所述直管通过所述轴向定位装置实现相对于所述滚轮支撑装置的轴向定位;以及自动焊接装置,邻近所述滚轮支撑装置设置,以实现所述直管的自动焊接。滚轮支撑装置实现支撑,轴向定位装置实现定位,从而可以使用自动焊接装置实现精准的自动焊接,使得大口径管直管从人工作业转化成机械作业,具有焊缝成型质量好、缺陷少、状态稳定的优点,并且能够节约人工、提升工作效率、降低人员技术要求。
一种直管双头法兰焊接安装方法.pdf
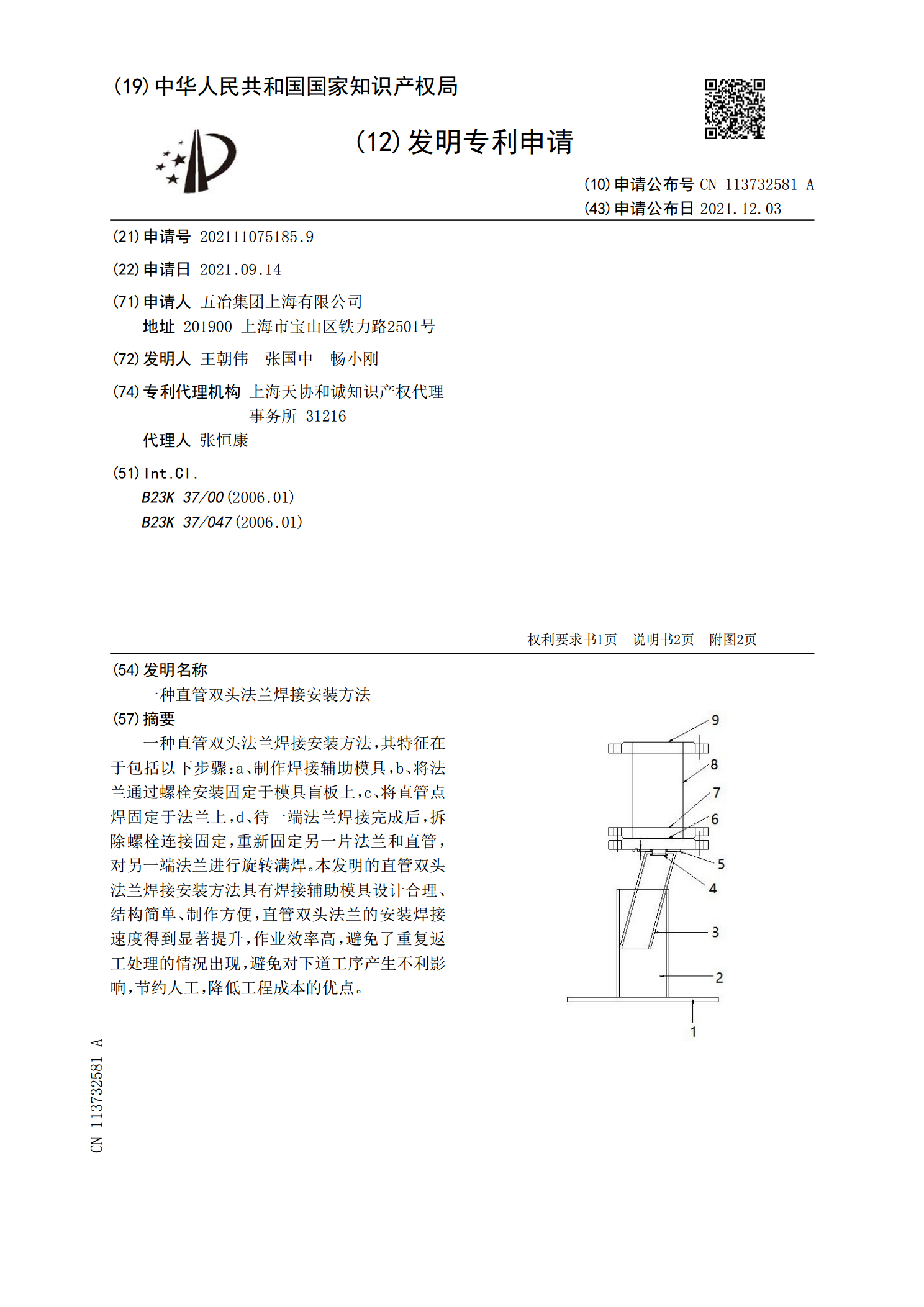
一种直管双头法兰焊接安装方法,其特征在于包括以下步骤:a、制作焊接辅助模具,b、将法兰通过螺栓安装固定于模具盲板上,c、将直管点焊固定于法兰上,d、待一端法兰焊接完成后,拆除螺栓连接固定,重新固定另一片法兰和直管,对另一端法兰进行旋转满焊。本发明的直管双头法兰焊接安装方法具有焊接辅助模具设计合理、结构简单、制作方便,直管双头法兰的安装焊接速度得到显著提升,作业效率高,避免了重复返工处理的情况出现,避免对下道工序产生不利影响,节约人工,降低工程成本的优点。

短管-法兰及管-管件焊接专机.pdf
本发明涉及一种短管-法兰及管-管件焊接专机,包括动力头和带枪架滚轮架,带枪架滚轮架通过滑轮安装在动力头机架上,动力头前端通过卡盘夹紧工件,带枪架滚轮架前后侧上部分别安装有操作箱和铝型材支架,铝型材支架上固定有横移滑架,横移滑架上安装有伺服十字滑架,伺服十字滑架中的水平滑架上装有转角机构,伺服十字滑架前端通过转臂机构固定焊枪,焊枪通过管线连接控制系统。焊枪可调整轴向和前后的焊接角度,并通过横移滑架和伺服十字滑架实现自动提升和摆动。本发明可以实现对接焊缝和角接焊缝自动焊接,打的填充盖面一次性完成,提升焊接效率

自动直管法兰焊接机.pdf
本发明涉及一种焊接机,特别涉及一种适用于插式法兰组装形式的焊接,也适用于对接式法兰组装形式的焊接的自动直管法兰焊接机。包括底座,底座上设有底座导轨,底座导轨上设有台车底座,台车底座上的一侧设有控制系统,台车底座上设有焊枪机,所述的焊枪机包括纵向调节机构、横向调节机构、内焊枪机构、外焊枪机构、滚轮调节机构,内焊枪机构包括内焊枪立柱装置和内焊枪装置,外焊枪机构包括外焊枪立柱装置和外焊枪装置。自动直管法兰焊接机自动化程度高,提高焊接效率,减少打磨时间及焊材的浪费,保证焊接质量及焊缝成型美观,操作便捷、省力、减轻