
基于多目标搜索的两群多向机器人路径规划方法.pdf

甲申****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于多目标搜索的两群多向机器人路径规划方法.pdf
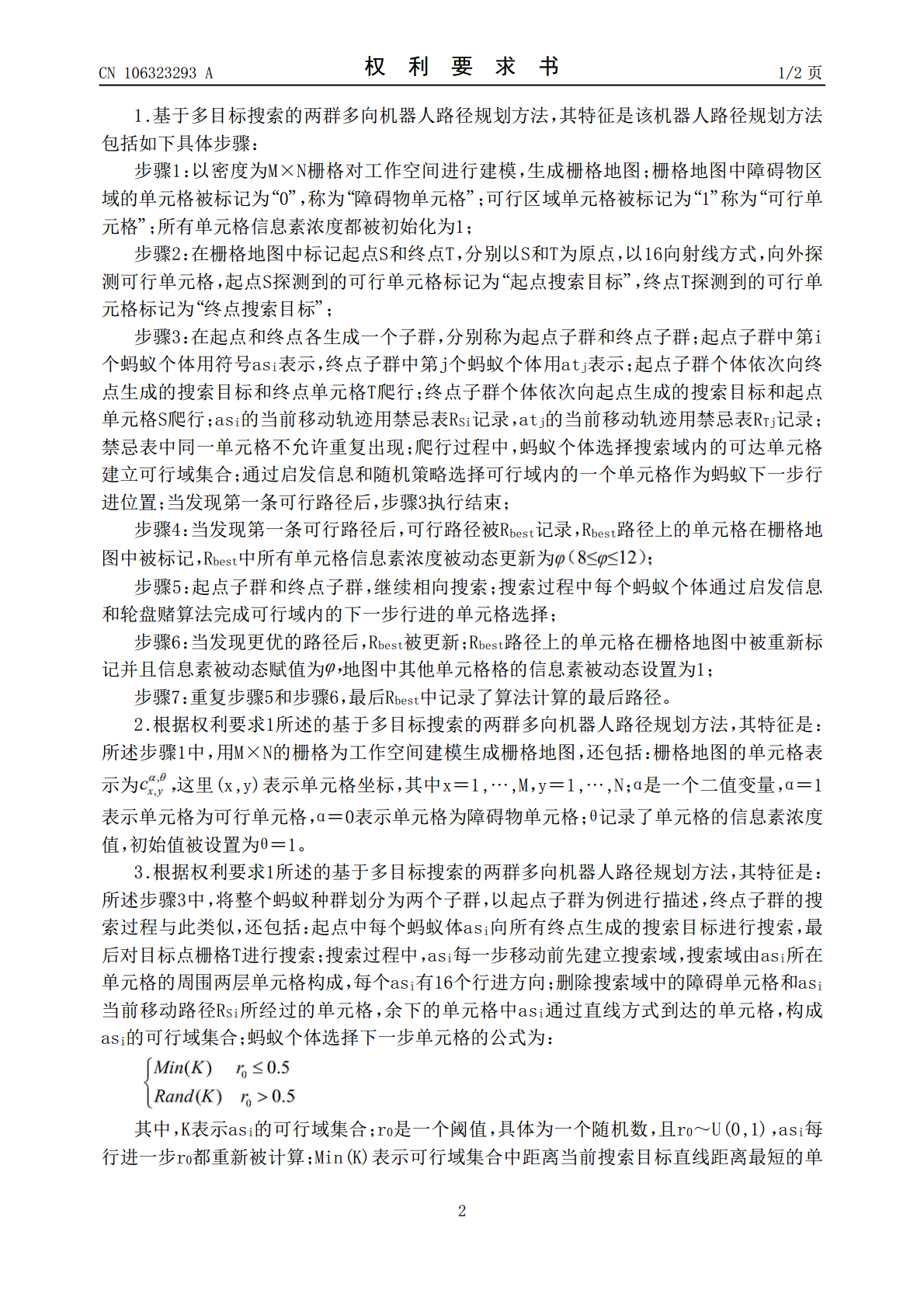
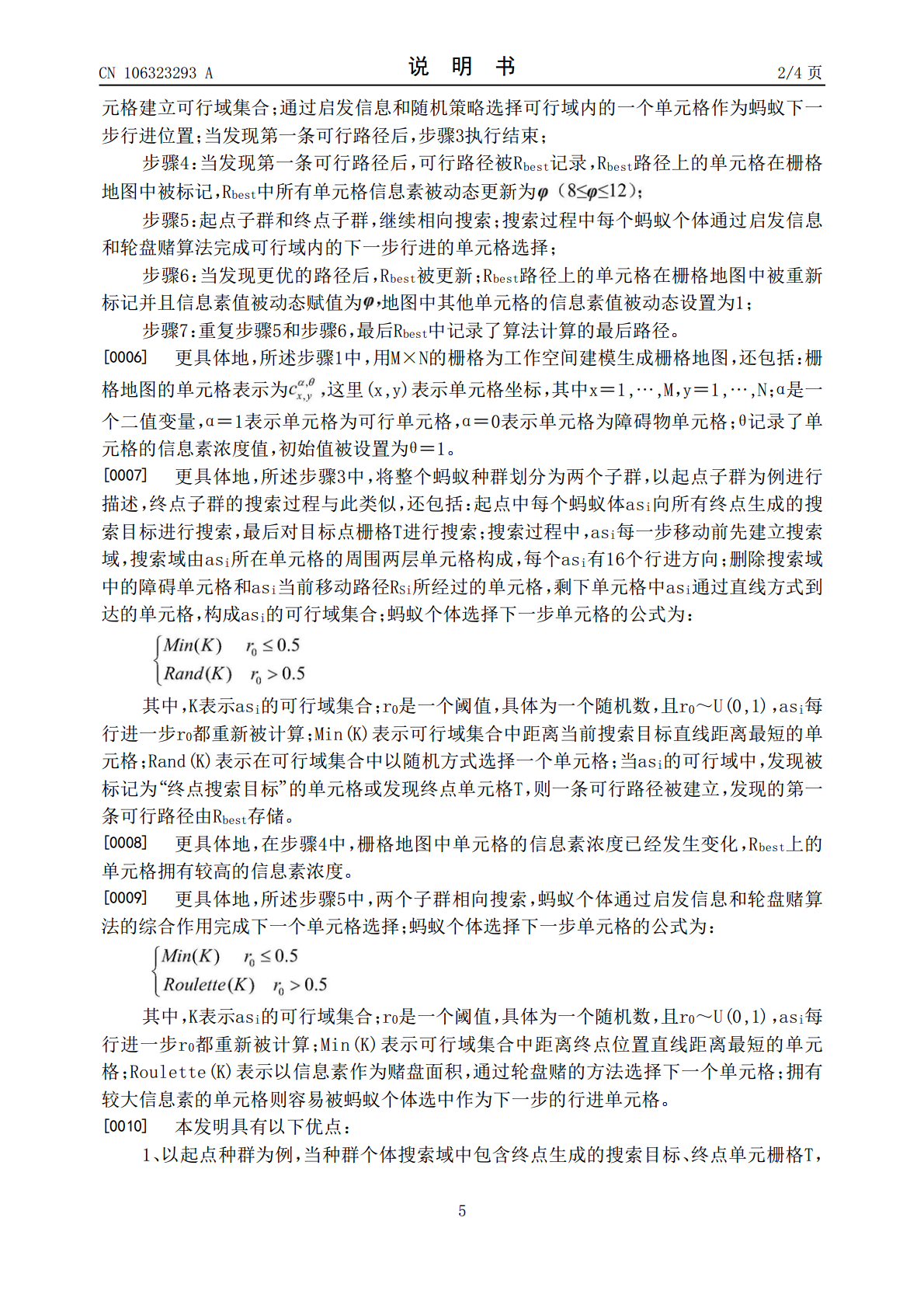
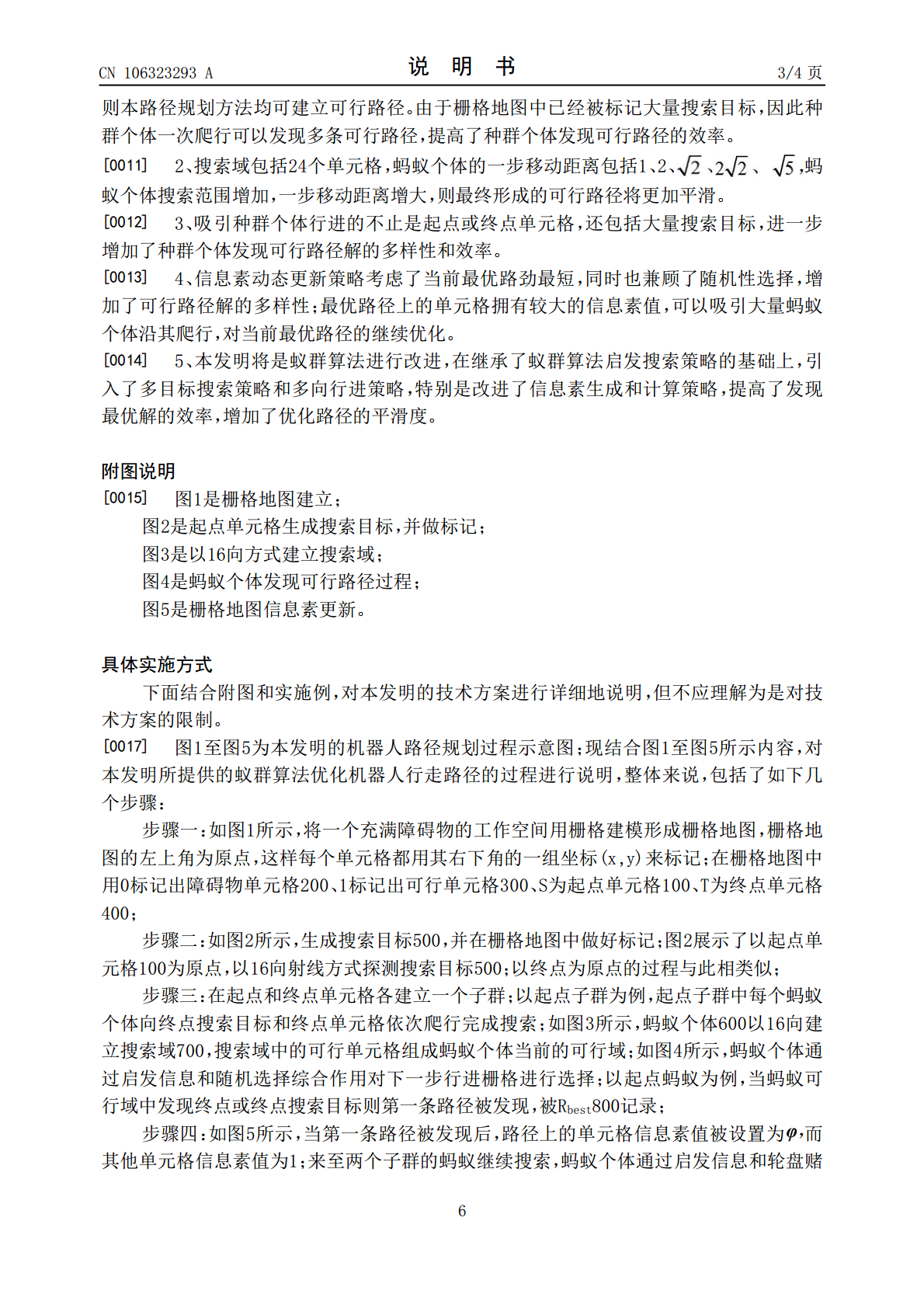
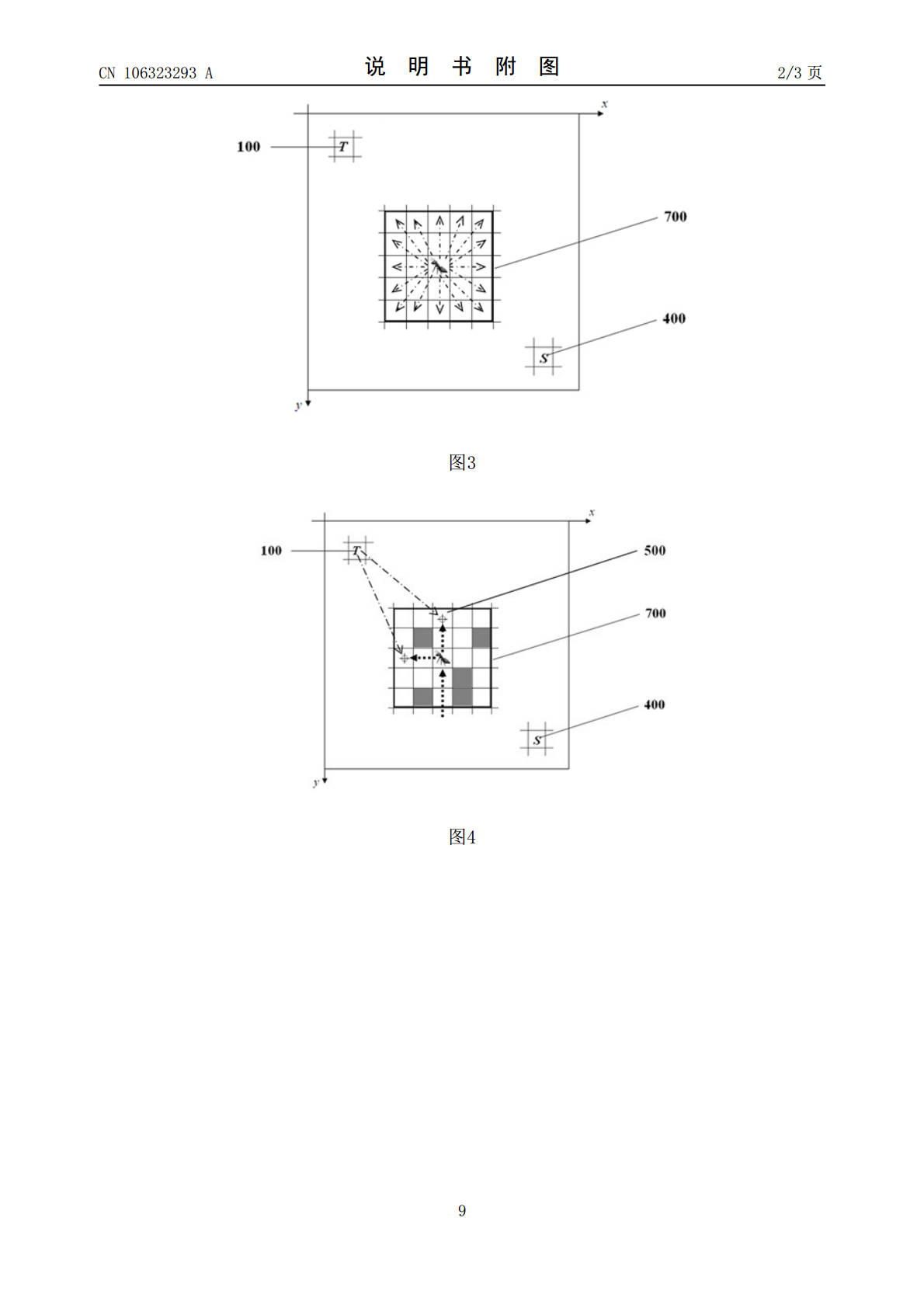
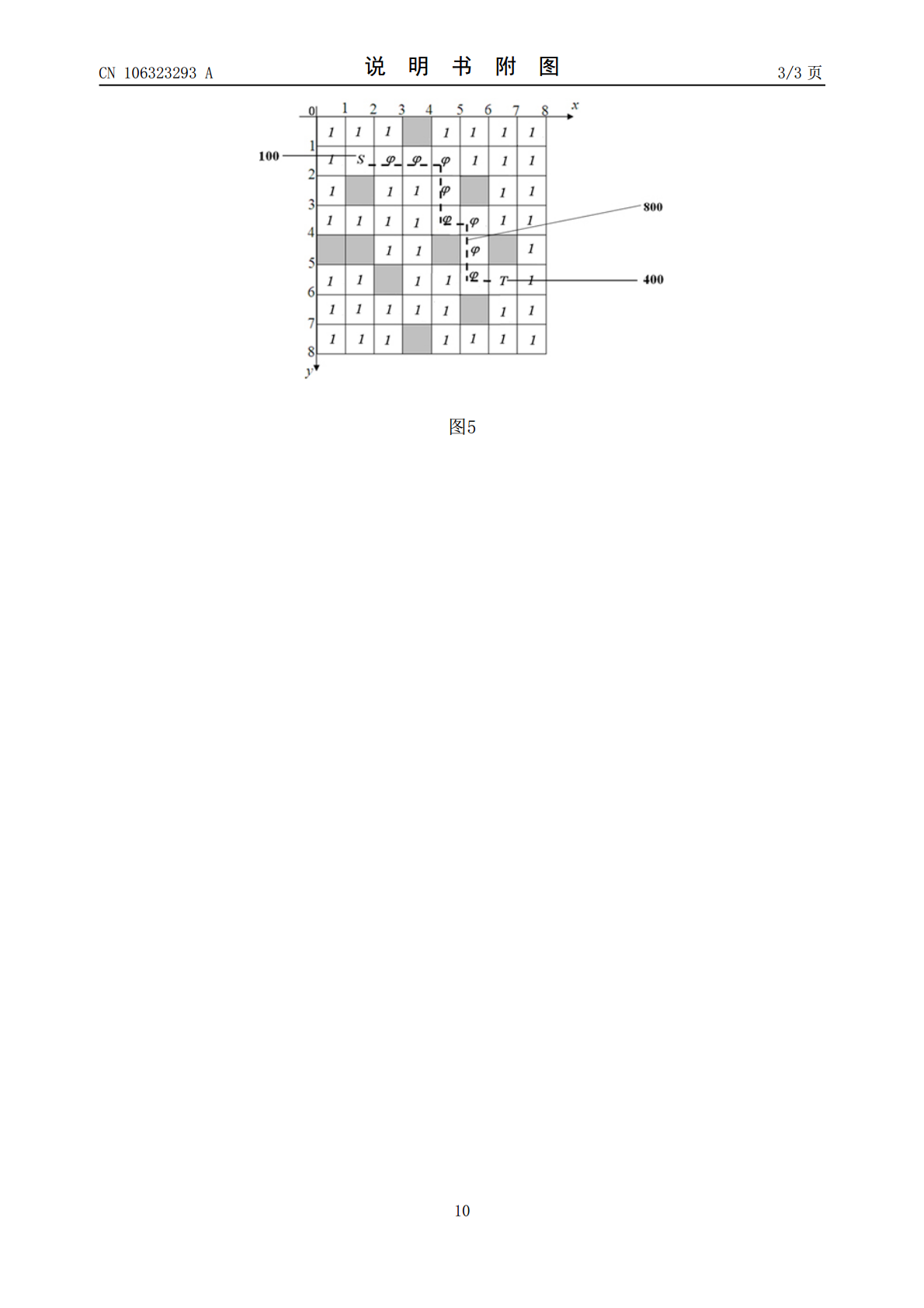
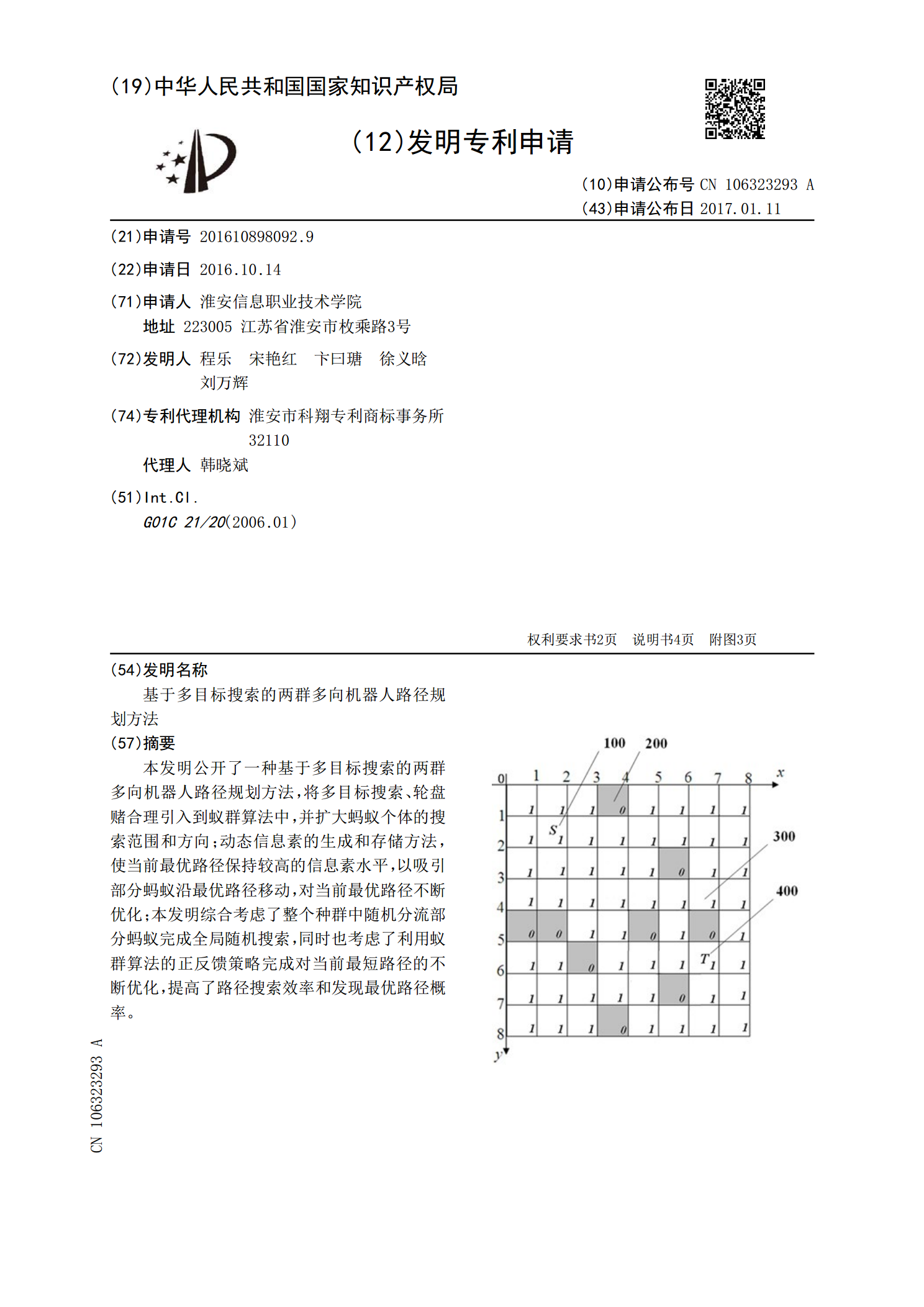
本发明公开了一种基于多目标搜索的两群多向机器人路径规划方法,将多目标搜索、轮盘赌合理引入到蚁群算法中,并扩大蚂蚁个体的搜索范围和方向;动态信息素的生成和存储方法,使当前最优路径保持较高的信息素水平,以吸引部分蚂蚁沿最优路径移动,对当前最优路径不断优化;本发明综合考虑了整个种群中随机分流部分蚂蚁完成全局随机搜索,同时也考虑了利用蚁群算法的正反馈策略完成对当前最短路径的不断优化,提高了路径搜索效率和发现最优路径概率。

基于分类搜索蚁群算法的机器人路径规划研究的任务书.docx
基于分类搜索蚁群算法的机器人路径规划研究的任务书一、研究背景随着机器人在工业领域中广泛应用,机器人的路径规划也变得越来越重要。路径规划是指机器人在满足任务需求的前提下,选择最佳路径达到目标点的过程,这是机器人实现自主移动和自主操作的重要基础。在实际应用过程中,机器人路径规划问题会受到环境约束和机器人自身的运动能力限制等多方面因素的影响。因此,如何在保证路径优化的同时满足多种需求是机器人路径规划的重要研究方向。近年来,蚁群算法在优化问题中被广泛应用,成功解决了诸如旅行商问题、车辆路径规划等一系列问题。蚁群算

基于量子猫群搜索机制的多目标中继选择方法.pdf
本发明提供的是一种基于量子猫群搜索机制的多目标中继选择方法。一,建立中继系统模型。二,初始化三个量子猫群。三,对第1个量子猫群和第2个量子猫进行更新。四:对第3个量子猫群中的每一量子猫进行更新。五:将第3个量子猫群更新出的H个量子猫放入非支配解集中。对非支配解集中的量子猫进行非支配解排序和拥挤度计算,保留前H个量子猫作为非支配解。将第3个量子猫的解群替换为非支配解集中的解。六:对非支配解集和演化单目标的量子猫群进行操作。七:如果进化没有终止,返回步骤三,否则,终止迭代,输出非支配解集中的非支配解。本发明可
基于多目标人工蜂群算法的多机器人路径规划方法.pdf
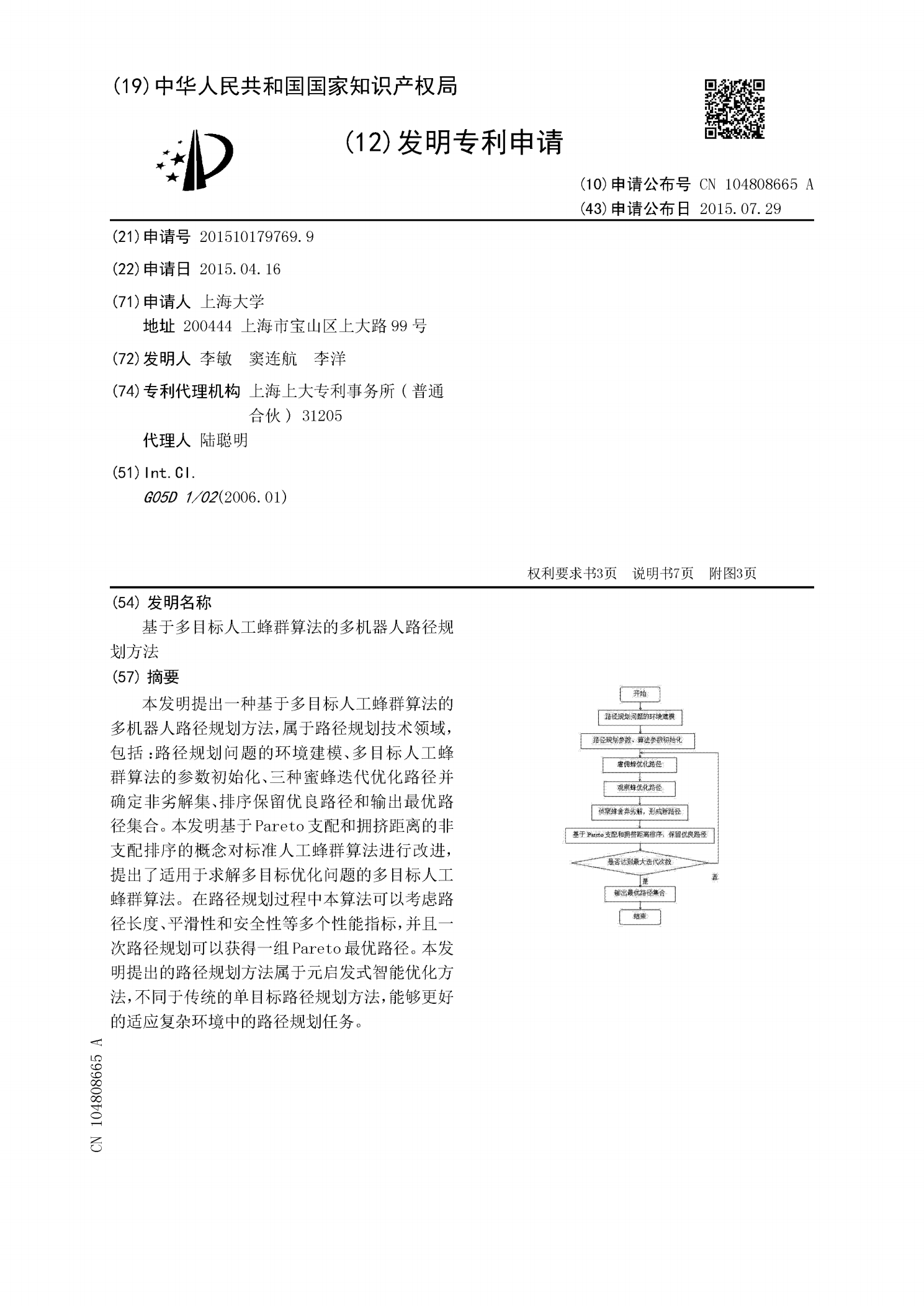
本发明提出一种基于多目标人工蜂群算法的多机器人路径规划方法,属于路径规划技术领域,包括:路径规划问题的环境建模、多目标人工蜂群算法的参数初始化、三种蜜蜂迭代优化路径并确定非劣解集、排序保留优良路径和输出最优路径集合。本发明基于Pareto支配和拥挤距离的非支配排序的概念对标准人工蜂群算法进行改进,提出了适用于求解多目标优化问题的多目标人工蜂群算法。在路径规划过程中本算法可以考虑路径长度、平滑性和安全性等多个性能指标,并且一次路径规划可以获得一组Pareto最优路径。本发明提出的路径规划方法属于元启发式智能
基于区间多目标优化的水下机器人全局路径规划方法.pdf
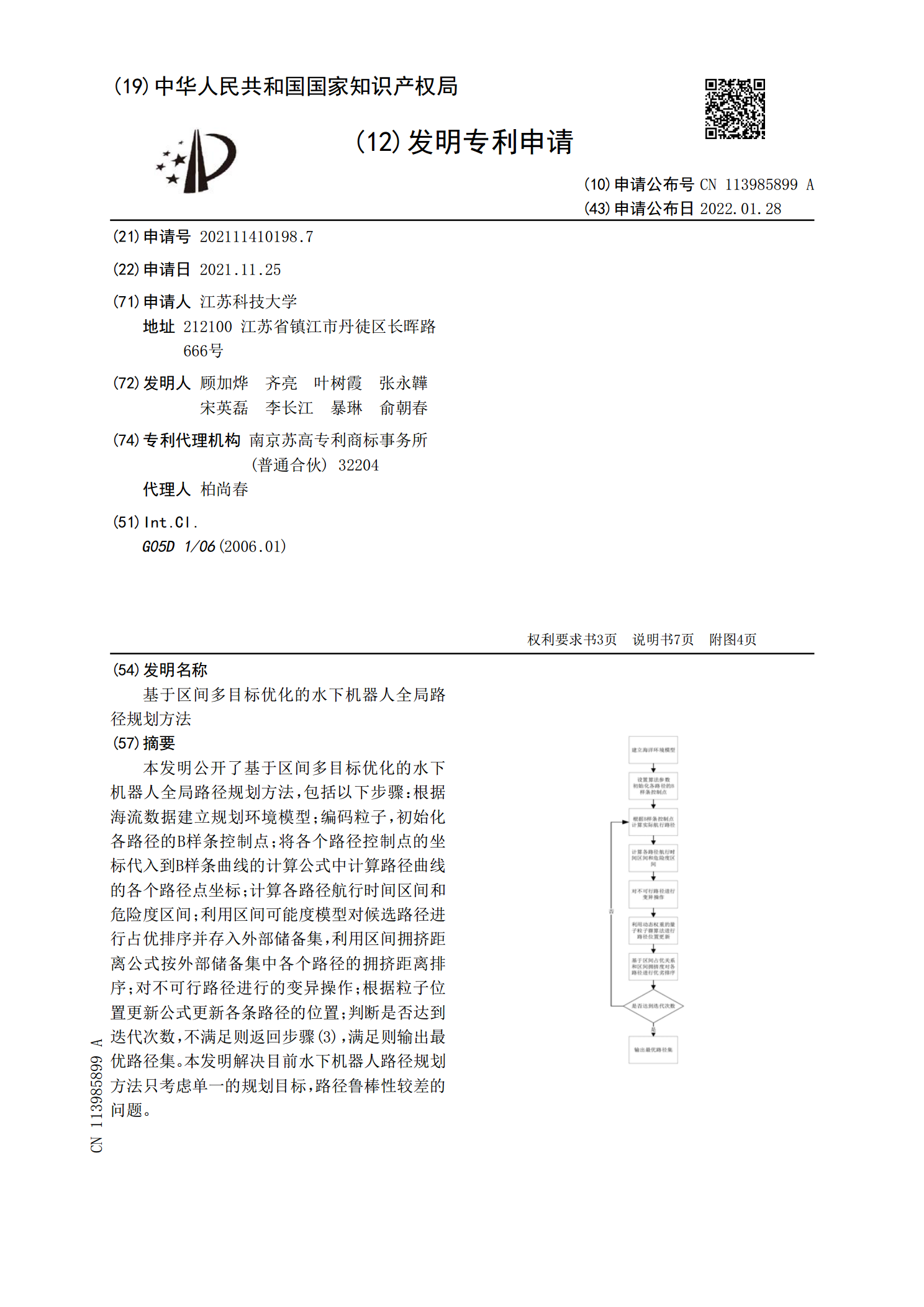
本发明公开了基于区间多目标优化的水下机器人全局路径规划方法,包括以下步骤:根据海流数据建立规划环境模型;编码粒子,初始化各路径的B样条控制点;将各个路径控制点的坐标代入到B样条曲线的计算公式中计算路径曲线的各个路径点坐标;计算各路径航行时间区间和危险度区间;利用区间可能度模型对候选路径进行占优排序并存入外部储备集,利用区间拥挤距离公式按外部储备集中各个路径的拥挤距离排序;对不可行路径进行的变异操作;根据粒子位置更新公式更新各条路径的位置;判断是否达到迭代次数,不满足则返回步骤(3),满足则输出最优路径集。