
一种基于机器视觉的小鼠探索的识别方法.pdf

含秀****66


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于机器视觉的小鼠探索的识别方法.pdf
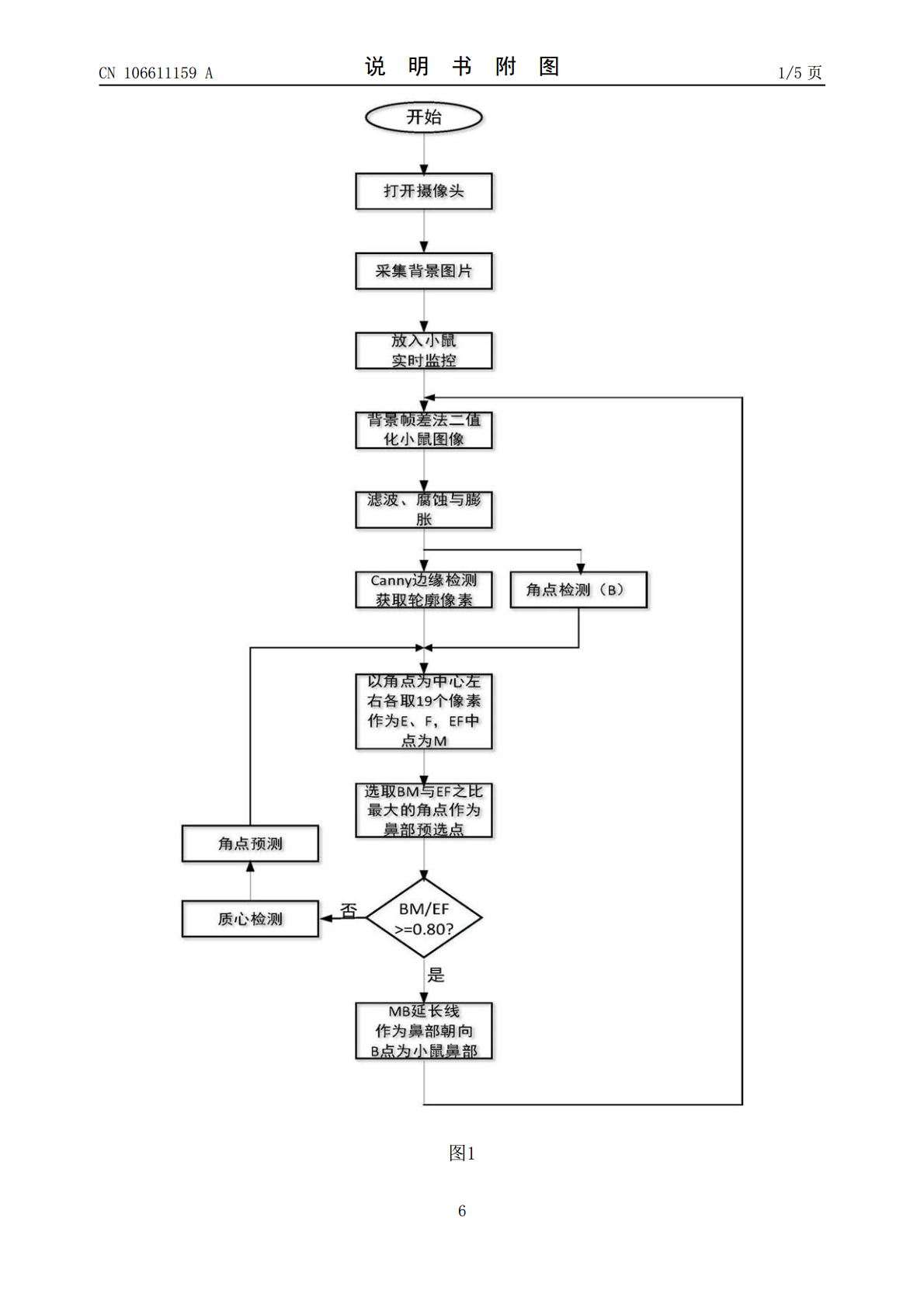
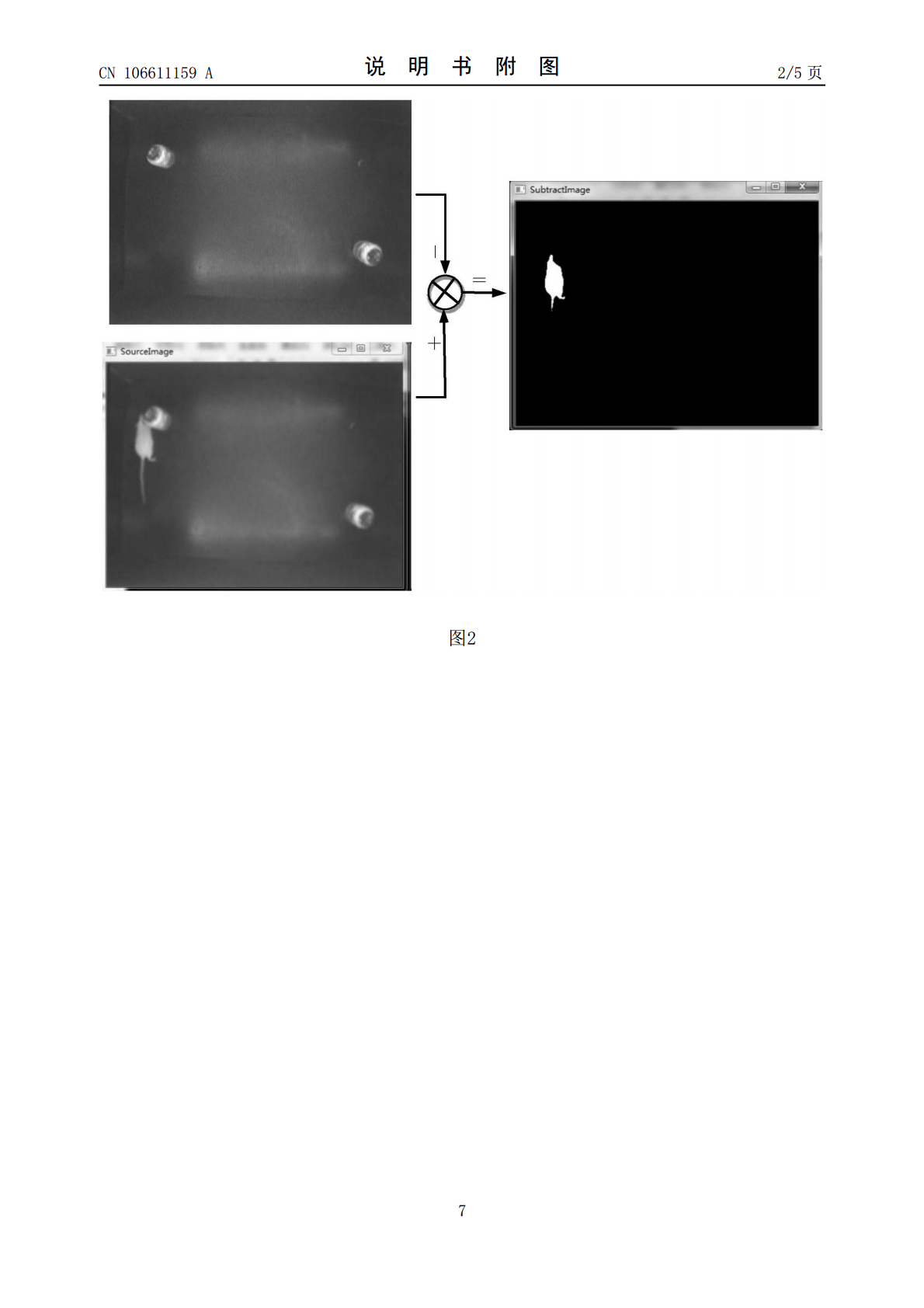
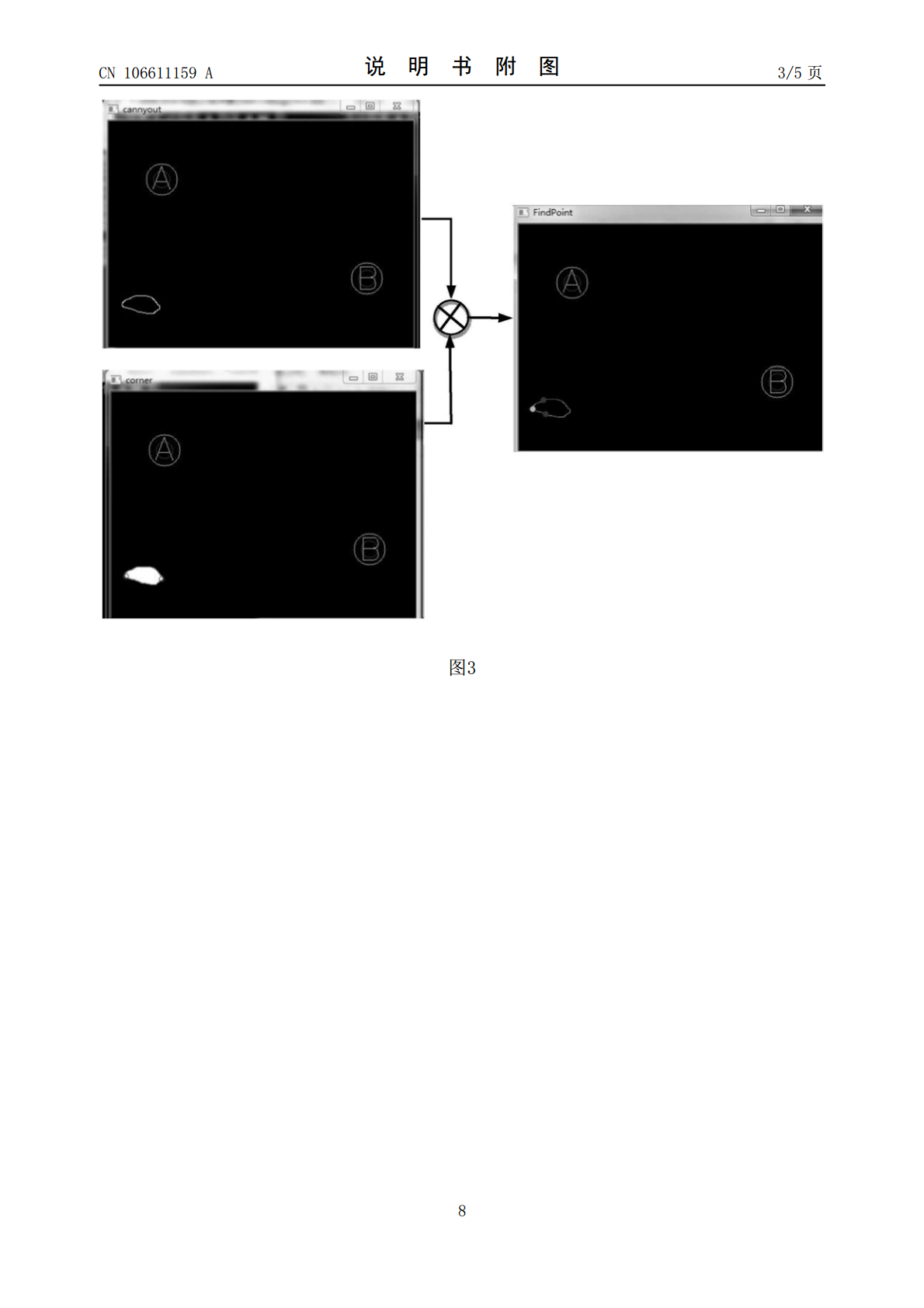
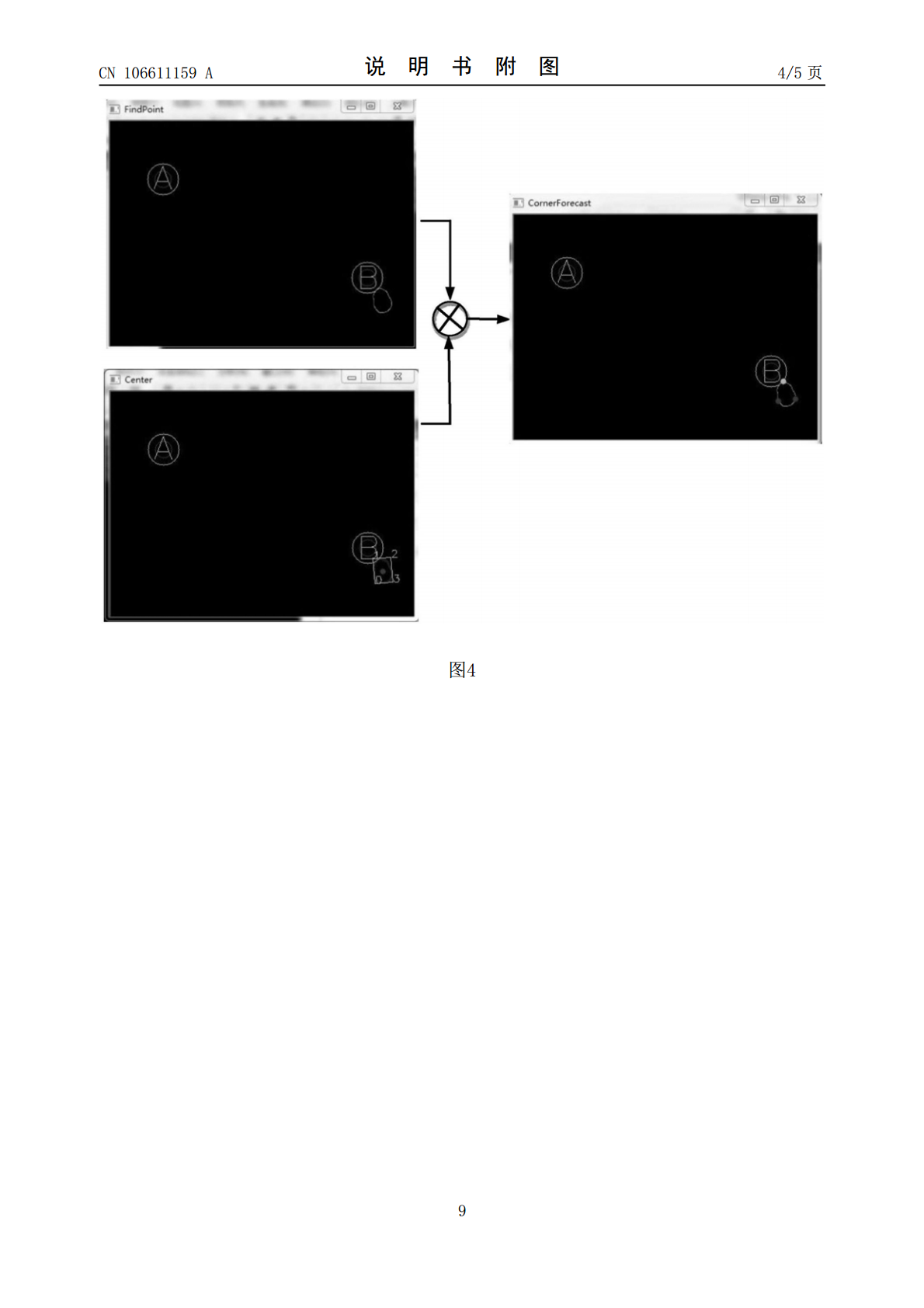
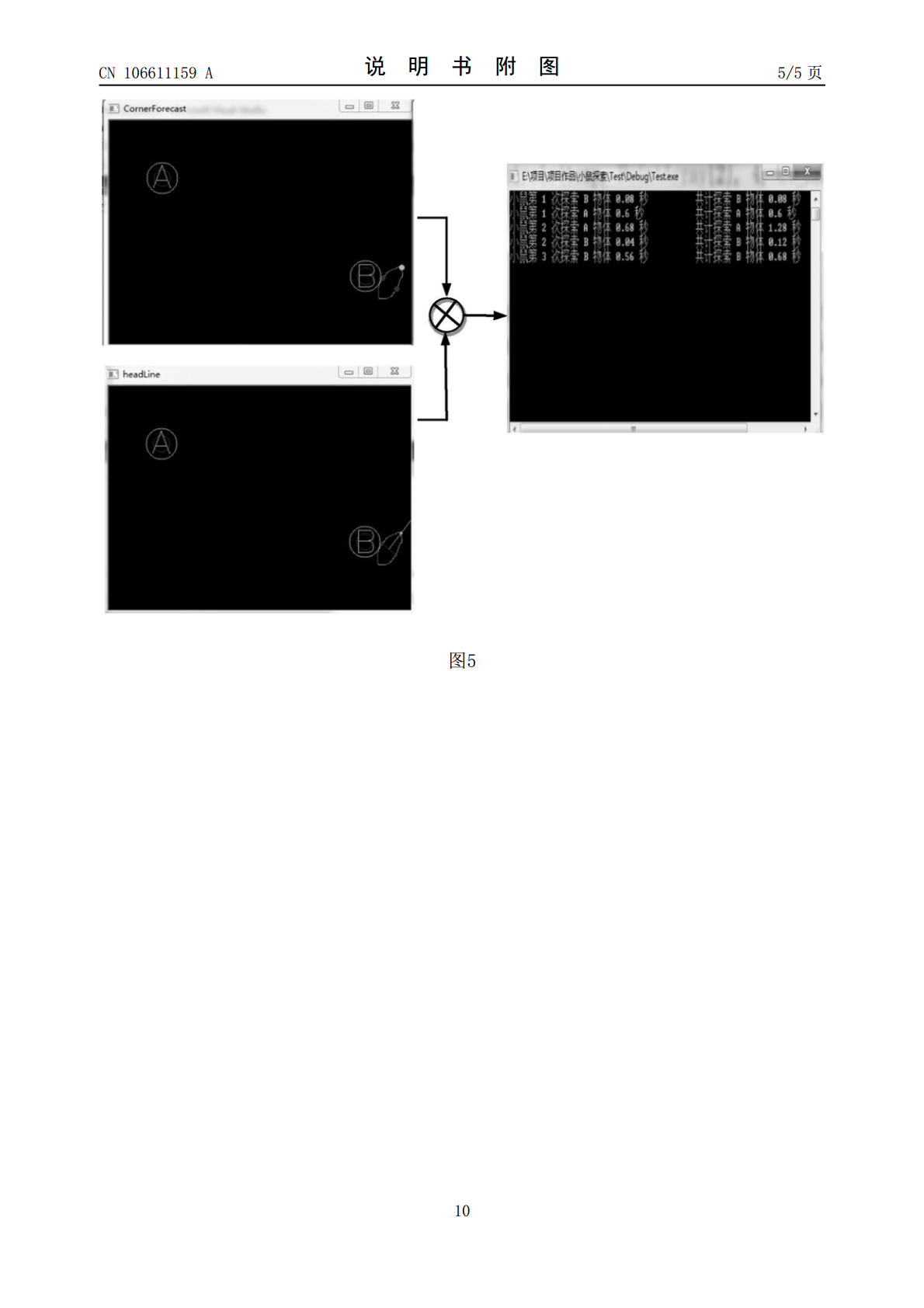
本发明公开了一种基于机器视觉的小鼠探索的识别方法,所述方法利用现有监控摄像机采集图像,利用背景分割技术将小鼠轮廓从图像中去噪并提取出来后,进行综合性的智能识别。将小鼠鼻部距离目标物体一定范围(可根据需求定义),且鼻部朝向经过目标物体的行为,视为探索行为,并记录探索时间。该方法综合各种机器视觉技术,包括Canny边缘检测,角点检测,质心检测等技术,并提出基于比例约束的角点检测的算法,和基于质心检测的角点预测算法,能够准确的识别实验小鼠鼻部探索行为参数,准确率高达97%。本发明方法无需人工监管,极大地节省人力
基于机器视觉的桥梁动力特性识别方法.pdf
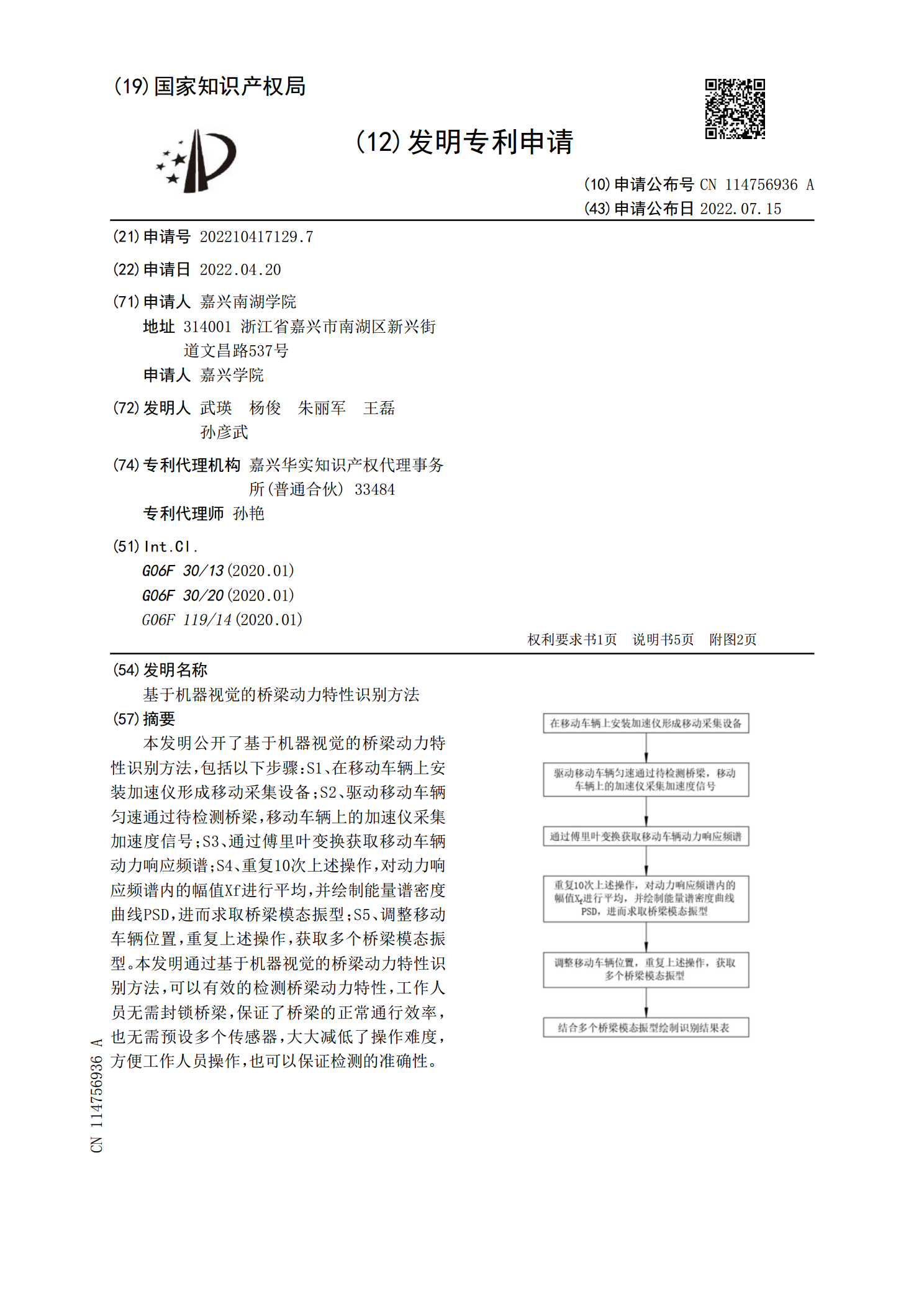
本发明公开了基于机器视觉的桥梁动力特性识别方法,包括以下步骤:S1、在移动车辆上安装加速仪形成移动采集设备;S2、驱动移动车辆匀速通过待检测桥梁,移动车辆上的加速仪采集加速度信号;S3、通过傅里叶变换获取移动车辆动力响应频谱;S4、重复10次上述操作,对动力响应频谱内的幅值Xf进行平均,并绘制能量谱密度曲线PSD,进而求取桥梁模态振型;S5、调整移动车辆位置,重复上述操作,获取多个桥梁模态振型。本发明通过基于机器视觉的桥梁动力特性识别方法,可以有效的检测桥梁动力特性,工作人员无需封锁桥梁,保证了桥梁的正常
一种基于机器视觉的工件定位与识别方法.pdf
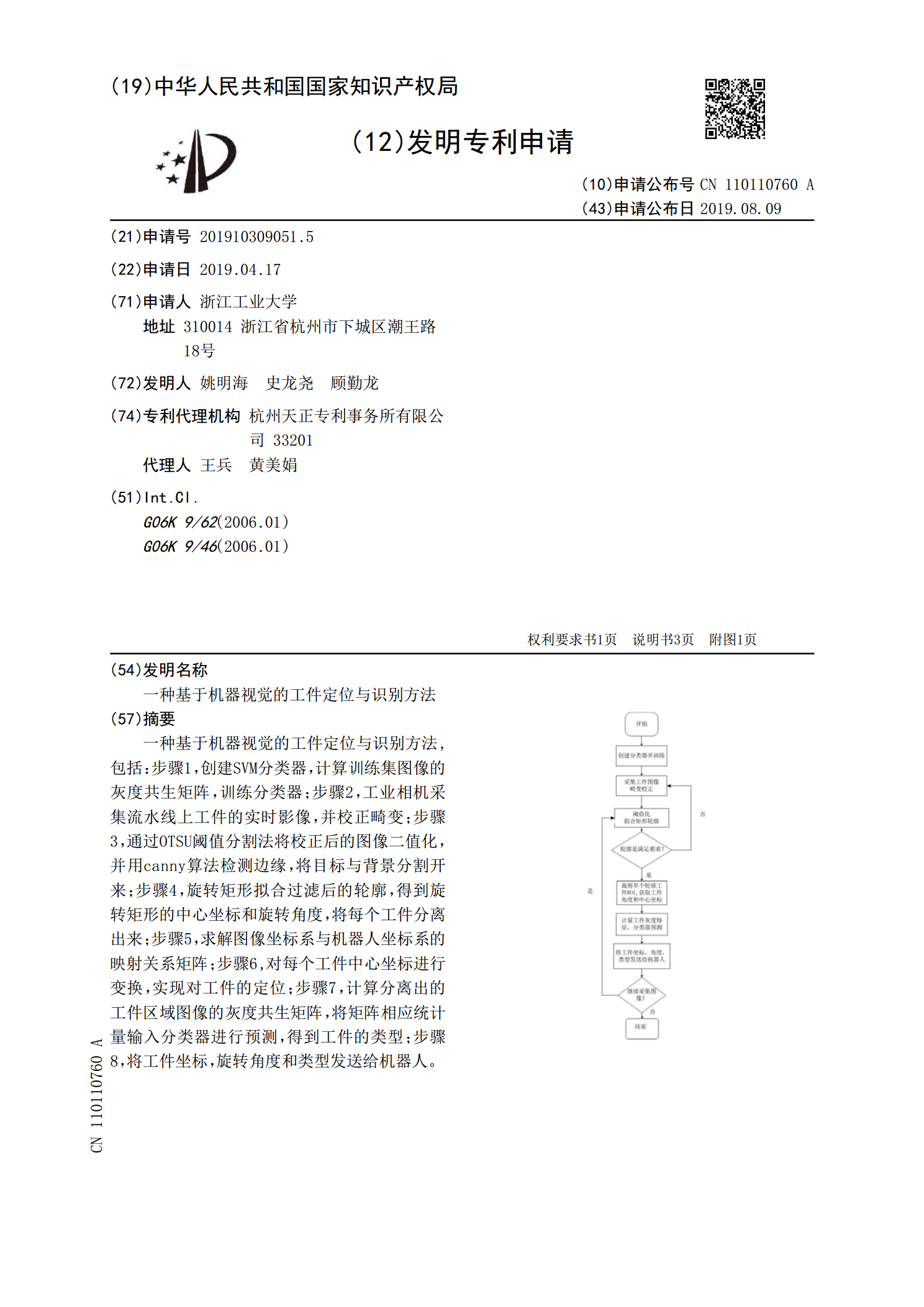
一种基于机器视觉的工件定位与识别方法,包括:步骤1,创建SVM分类器,计算训练集图像的灰度共生矩阵,训练分类器;步骤2,工业相机采集流水线上工件的实时影像,并校正畸变;步骤3,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;步骤4,旋转矩形拟合过滤后的轮廓,得到旋转矩形的中心坐标和旋转角度,将每个工件分离出来;步骤5,求解图像坐标系与机器人坐标系的映射关系矩阵;步骤6,对每个工件中心坐标进行变换,实现对工件的定位;步骤7,计算分离出的工件区域图像的灰度共生矩阵
一种基于机器视觉的动态图像识别方法.pdf
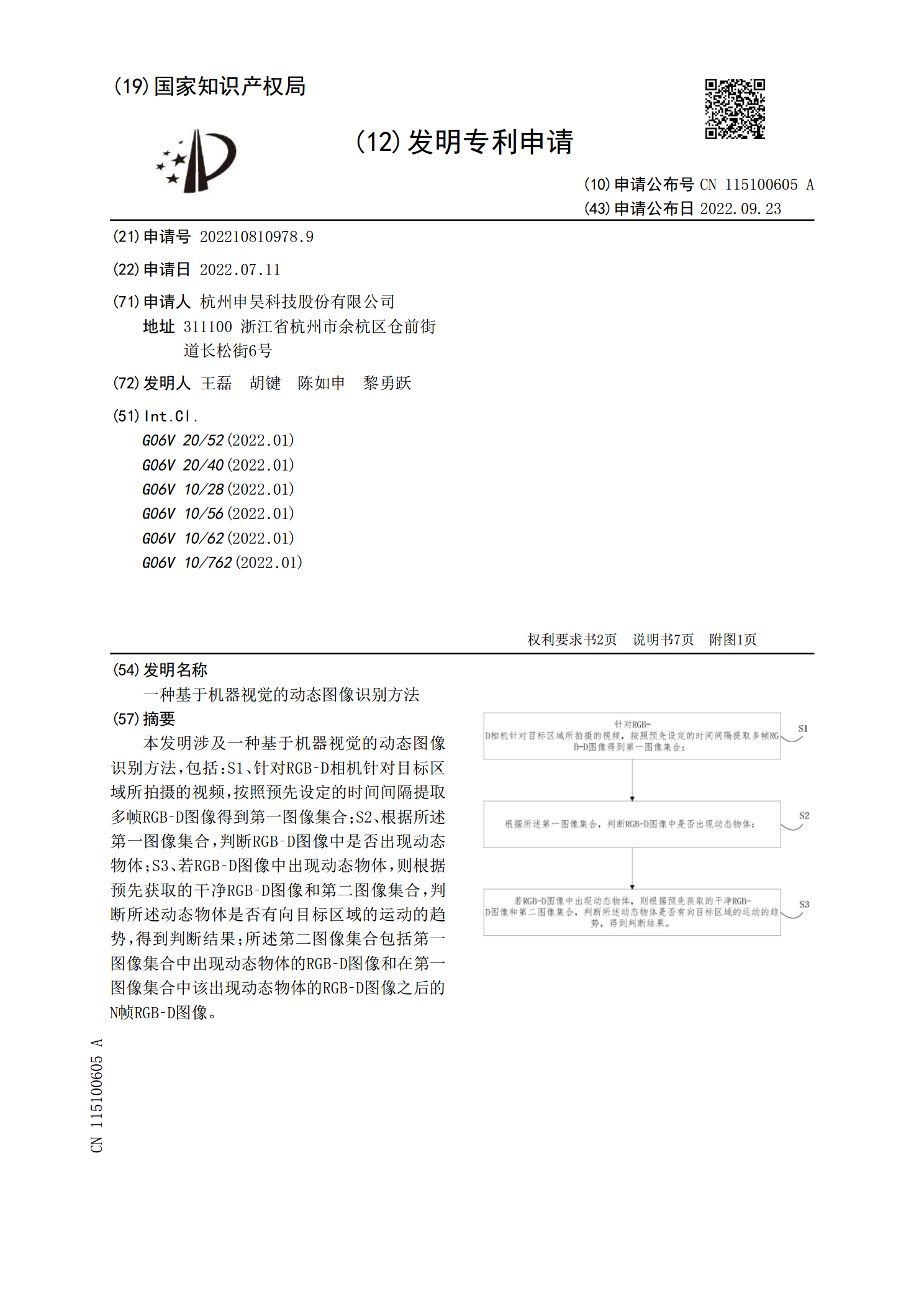
本发明涉及一种基于机器视觉的动态图像识别方法,包括:S1、针对RGB‑D相机针对目标区域所拍摄的视频,按照预先设定的时间间隔提取多帧RGB‑D图像得到第一图像集合;S2、根据所述第一图像集合,判断RGB‑D图像中是否出现动态物体;S3、若RGB‑D图像中出现动态物体,则根据预先获取的干净RGB‑D图像和第二图像集合,判断所述动态物体是否有向目标区域的运动的趋势,得到判断结果;所述第二图像集合包括第一图像集合中出现动态物体的RGB‑D图像和在第一图像集合中该出现动态物体的RGB‑D图像之后的N帧RGB‑D图
一种基于机器视觉的表具自动识别方法.pdf
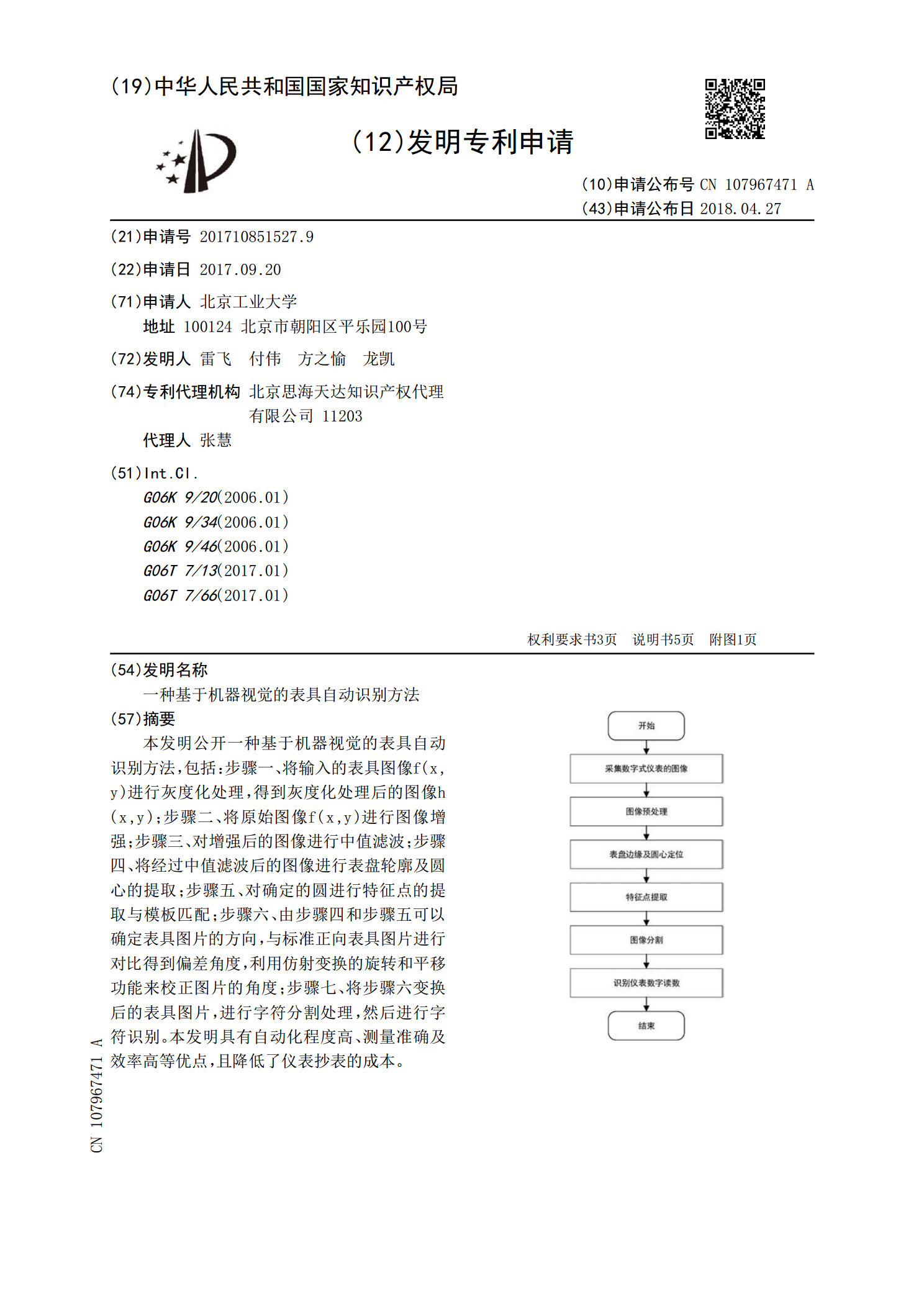
本发明公开一种基于机器视觉的表具自动识别方法,包括:步骤一、将输入的表具图像f(x,y)进行灰度化处理,得到灰度化处理后的图像h(x,y);步骤二、将原始图像f(x,y)进行图像增强;步骤三、对增强后的图像进行中值滤波;步骤四、将经过中值滤波后的图像进行表盘轮廓及圆心的提取;步骤五、对确定的圆进行特征点的提取与模板匹配;步骤六、由步骤四和步骤五可以确定表具图片的方向,与标准正向表具图片进行对比得到偏差角度,利用仿射变换的旋转和平移功能来校正图片的角度;步骤七、将步骤六变换后的表具图片,进行字符分割处理,然