
一种轨道机器人精确定位系统及精确定位方法.pdf

努力****向丝

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轨道机器人精确定位系统及精确定位方法.pdf
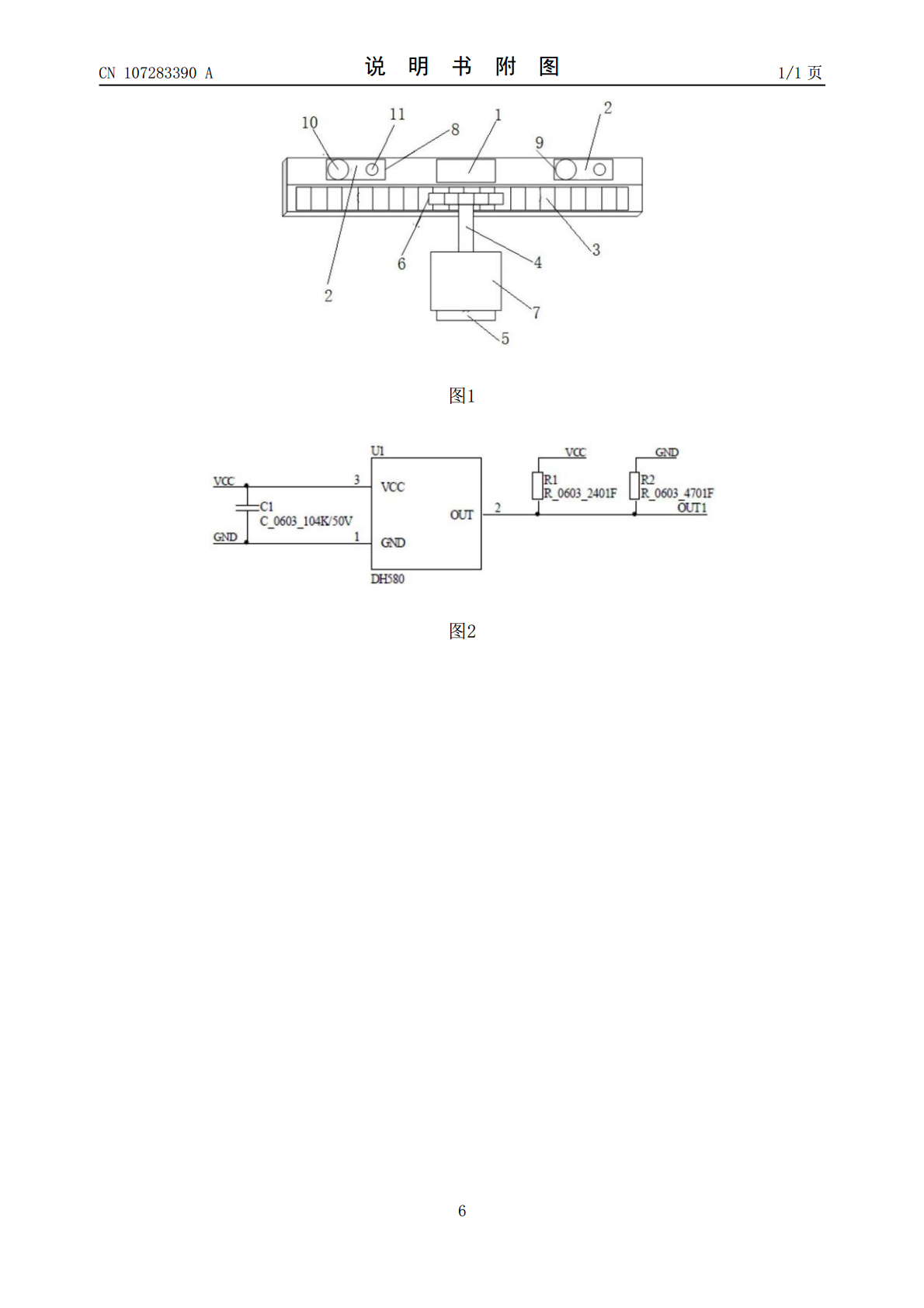
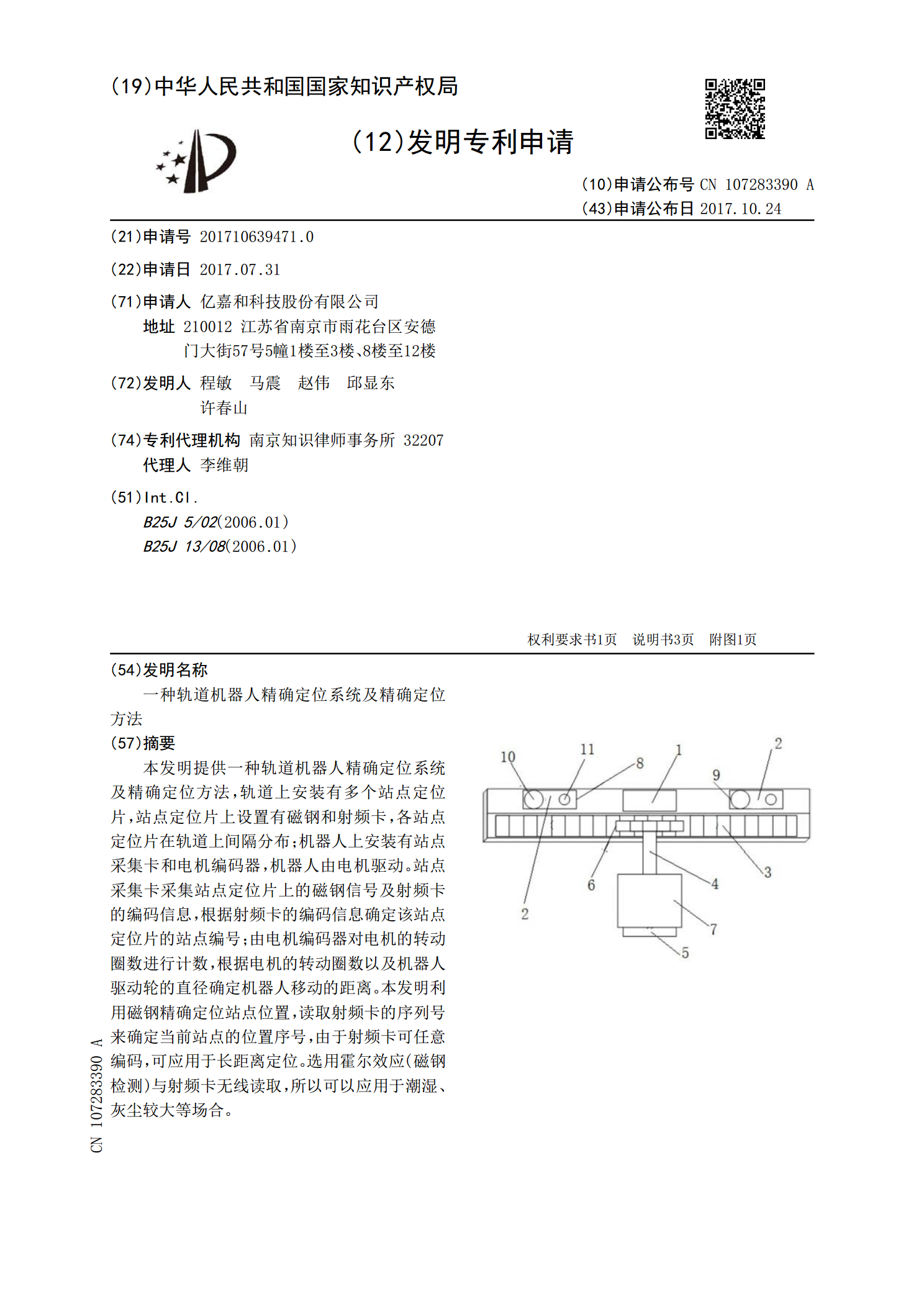
本发明提供一种轨道机器人精确定位系统及精确定位方法,轨道上安装有多个站点定位片,站点定位片上设置有磁钢和射频卡,各站点定位片在轨道上间隔分布;机器人上安装有站点采集卡和电机编码器,机器人由电机驱动。站点采集卡采集站点定位片上的磁钢信号及射频卡的编码信息,根据射频卡的编码信息确定该站点定位片的站点编号;由电机编码器对电机的转动圈数进行计数,根据电机的转动圈数以及机器人驱动轮的直径确定机器人移动的距离。本发明利用磁钢精确定位站点位置,读取射频卡的序列号来确定当前站点的位置序号,由于射频卡可任意编码,可应用于长
轨道精确定位机构以及轨道精确运动装置.pdf
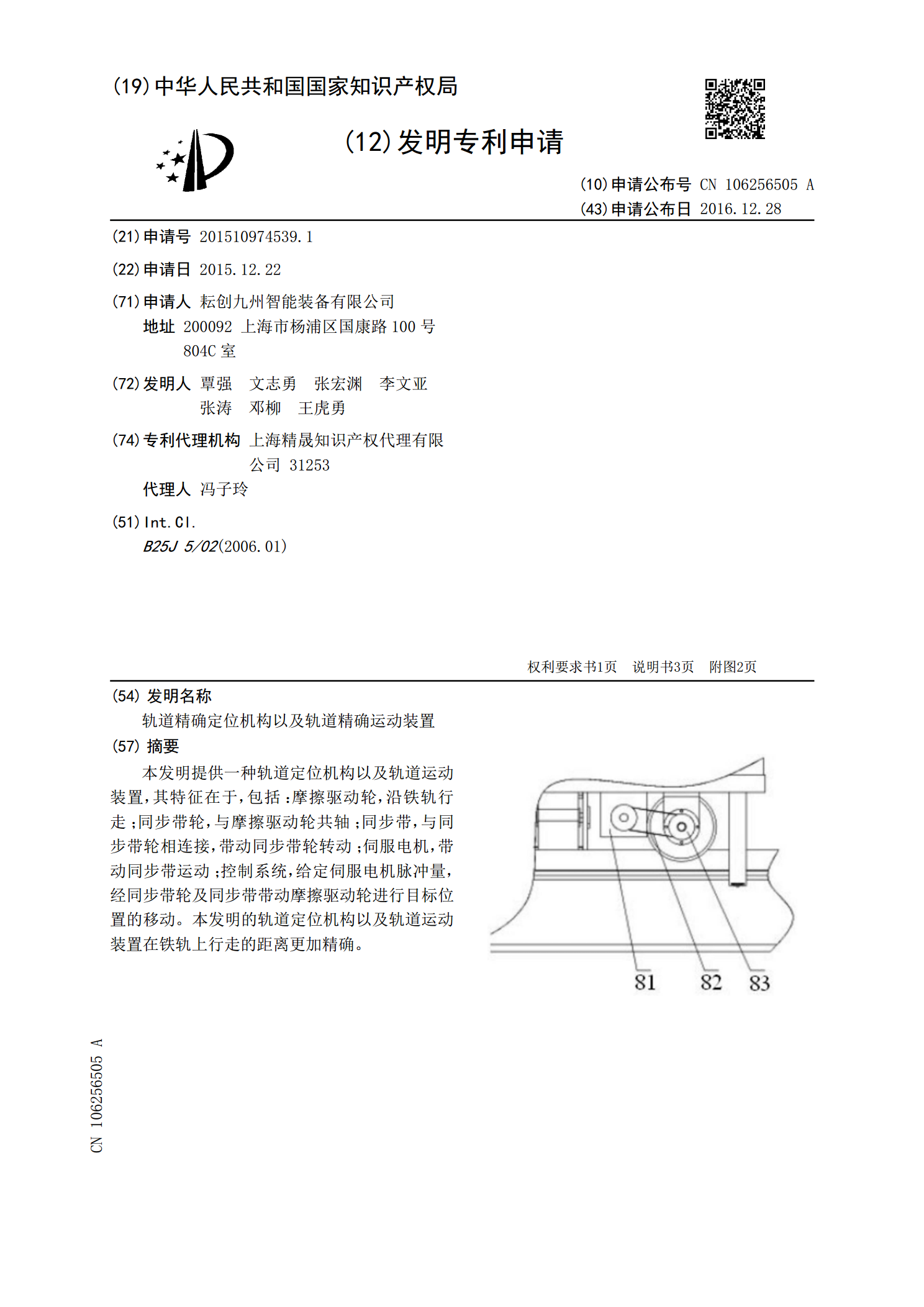
本发明提供一种轨道定位机构以及轨道运动装置,其特征在于,包括:摩擦驱动轮,沿铁轨行走;同步带轮,与摩擦驱动轮共轴;同步带,与同步带轮相连接,带动同步带轮转动;伺服电机,带动同步带运动;控制系统,给定伺服电机脉冲量,经同步带轮及同步带带动摩擦驱动轮进行目标位置的移动。本发明的轨道定位机构以及轨道运动装置在铁轨上行走的距离更加精确。

一种目标跟踪丢失后的精确定位方法及精确定位系统.pdf
本发明提供一种目标跟踪丢失后的精确定位方法及精确定位系统,方法包括:基于卷积神经网络识别每一帧图像信息中的目标预测结果,所述目标预测结果包括目标框预测位置;根据每一帧图像信息经过卷积神经网络的目标预测结果的置信度输出,判别目标是否出现丢失现象以及目标出现丢失现象对应的当前帧图像信息;基于当前帧图像信息,对其中的目标位置进行粗定位和精定位,获得当前帧图像信息的精定位目标跟踪位置。当目标出现遮挡特别是完全遮挡时,目标跟踪任务会失败,或者快速运动的目标超出观察视场导致目标丢失的情况下,通过本发明可以对跟踪丢失的
一种井下精确定位系统及井下定位方法.pdf
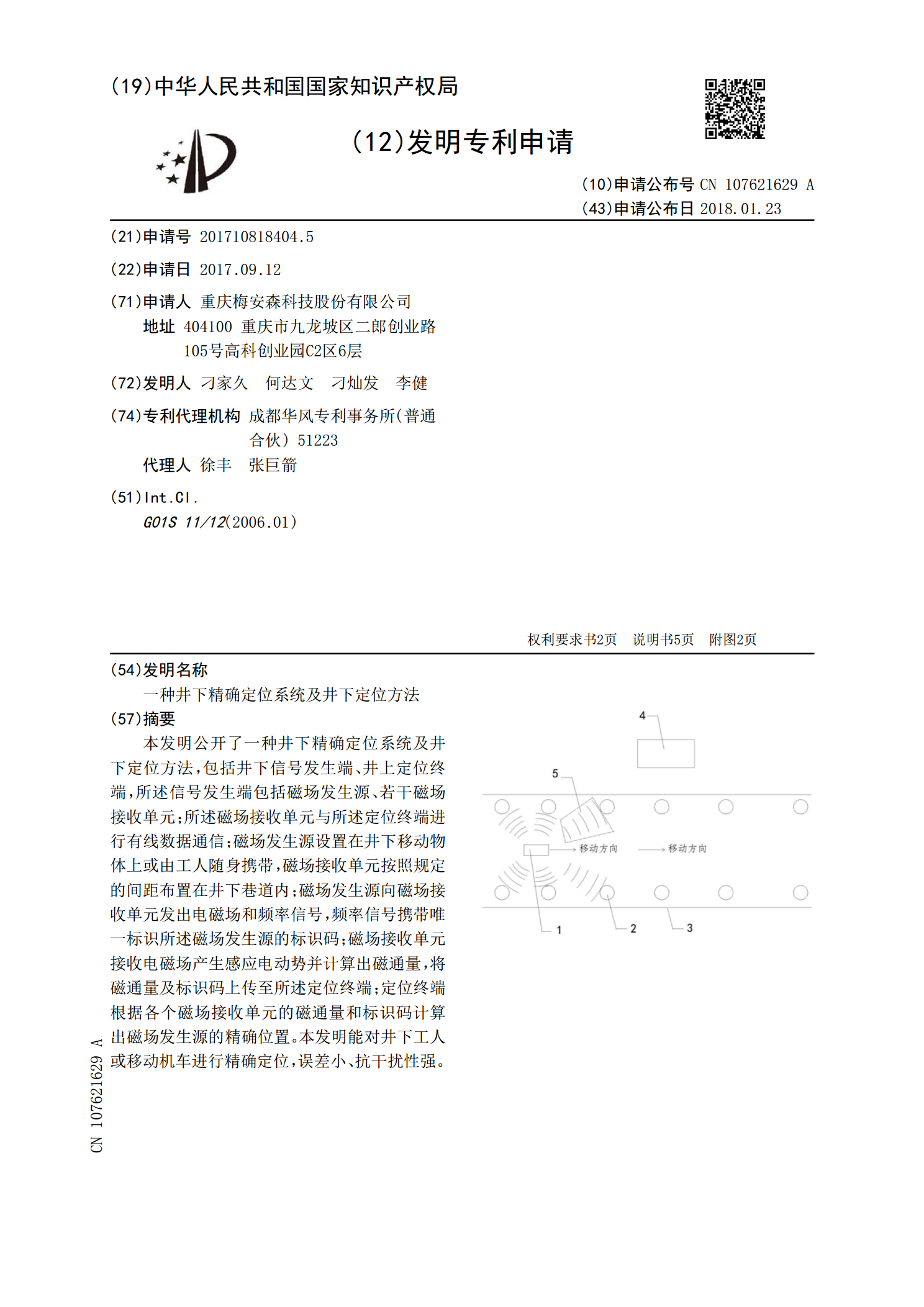
本发明公开了一种井下精确定位系统及井下定位方法,包括井下信号发生端、井上定位终端,所述信号发生端包括磁场发生源、若干磁场接收单元;所述磁场接收单元与所述定位终端进行有线数据通信;磁场发生源设置在井下移动物体上或由工人随身携带,磁场接收单元按照规定的间距布置在井下巷道内;磁场发生源向磁场接收单元发出电磁场和频率信号,频率信号携带唯一标识所述磁场发生源的标识码;磁场接收单元接收电磁场产生感应电动势并计算出磁通量,将磁通量及标识码上传至所述定位终端;定位终端根据各个磁场接收单元的磁通量和标识码计算出磁场发生源的
精确定位系统及其使用方法.pdf
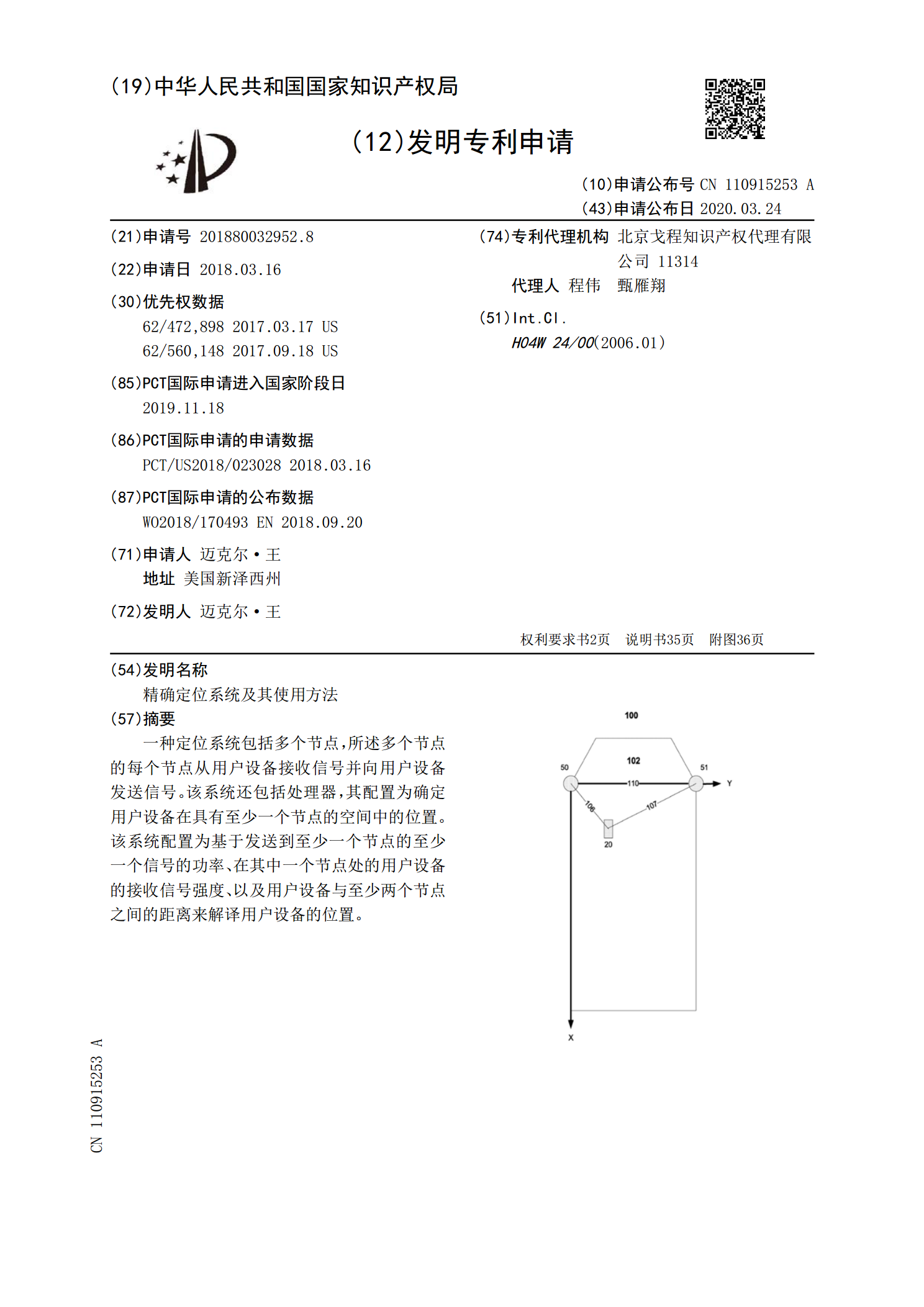
一种定位系统包括多个节点,所述多个节点的每个节点从用户设备接收信号并向用户设备发送信号。该系统还包括处理器,其配置为确定用户设备在具有至少一个节点的空间中的位置。该系统配置为基于发送到至少一个节点的至少一个信号的功率、在其中一个节点处的用户设备的接收信号强度、以及用户设备与至少两个节点之间的距离来解译用户设备的位置。