
一种多连杆式电动爬楼机构.pdf

是你****盟主

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多连杆式电动爬楼机构.pdf
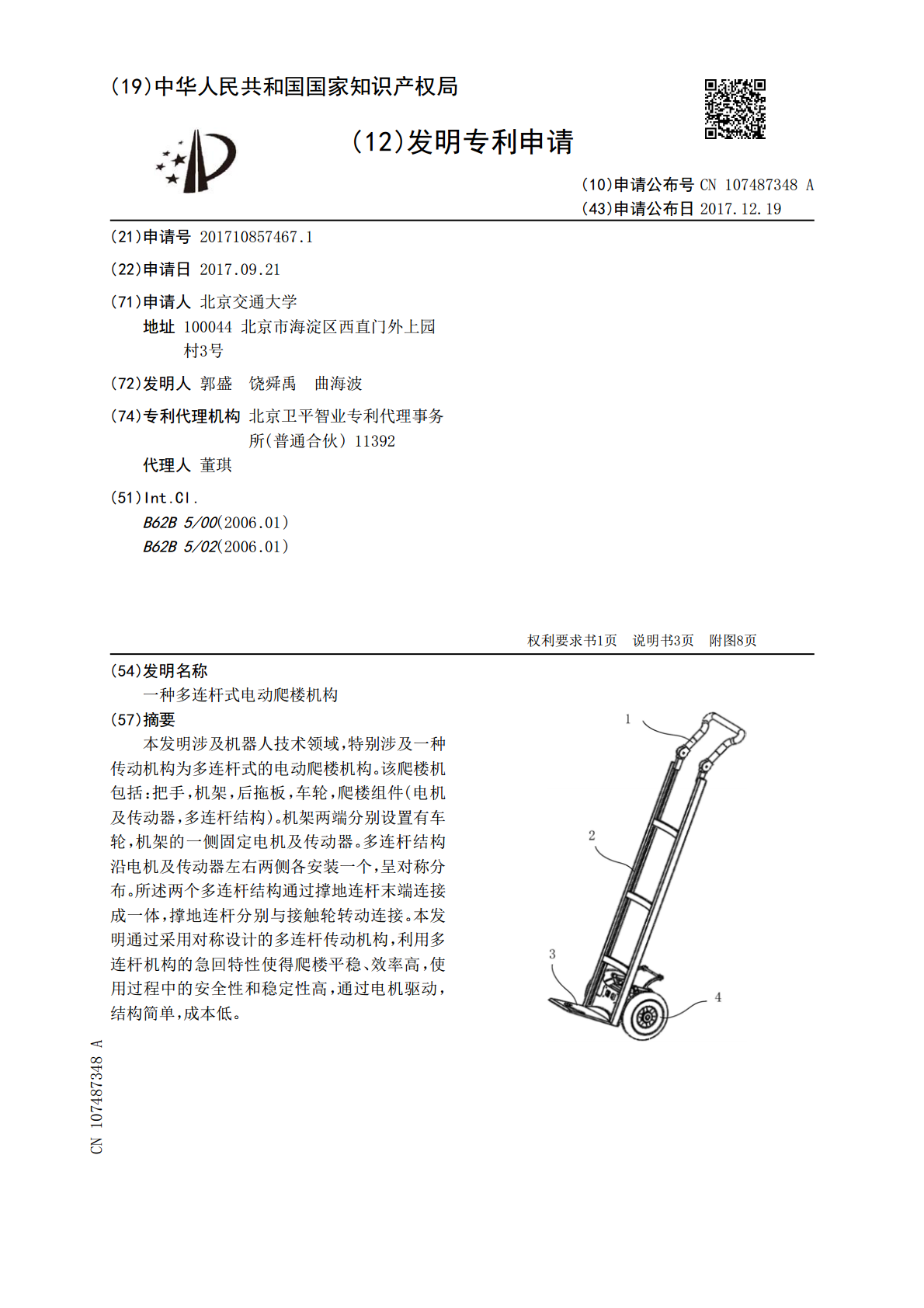
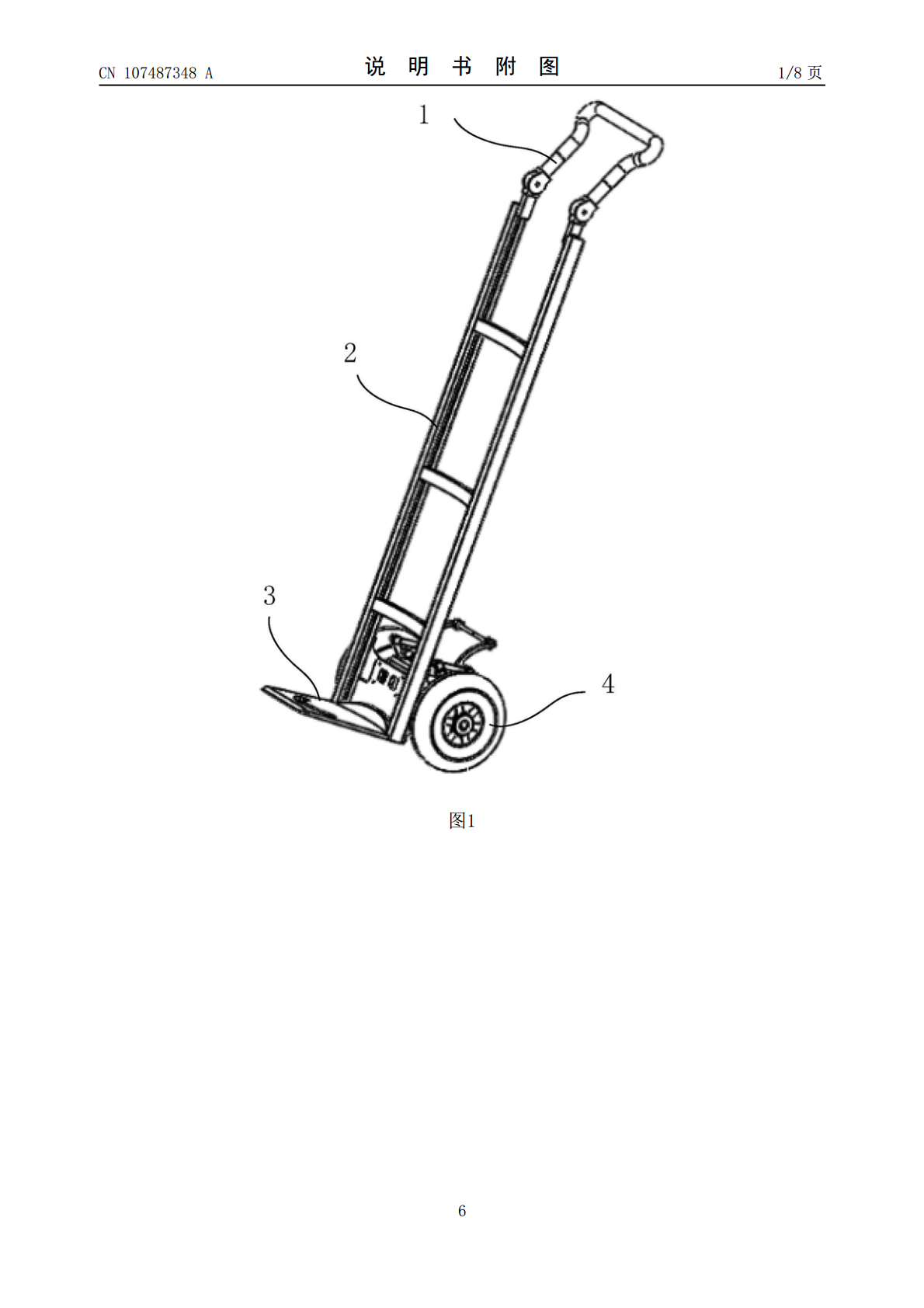
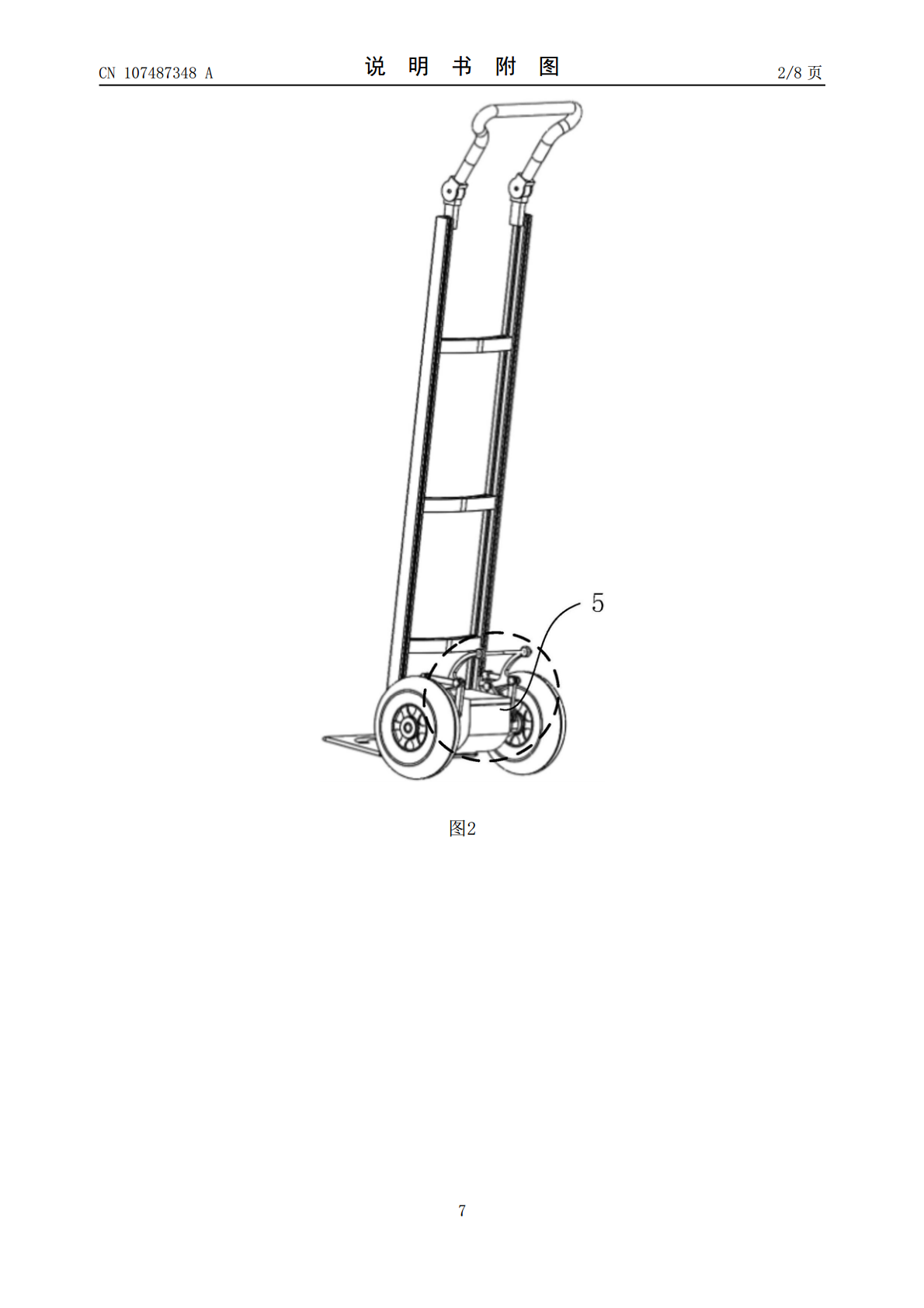
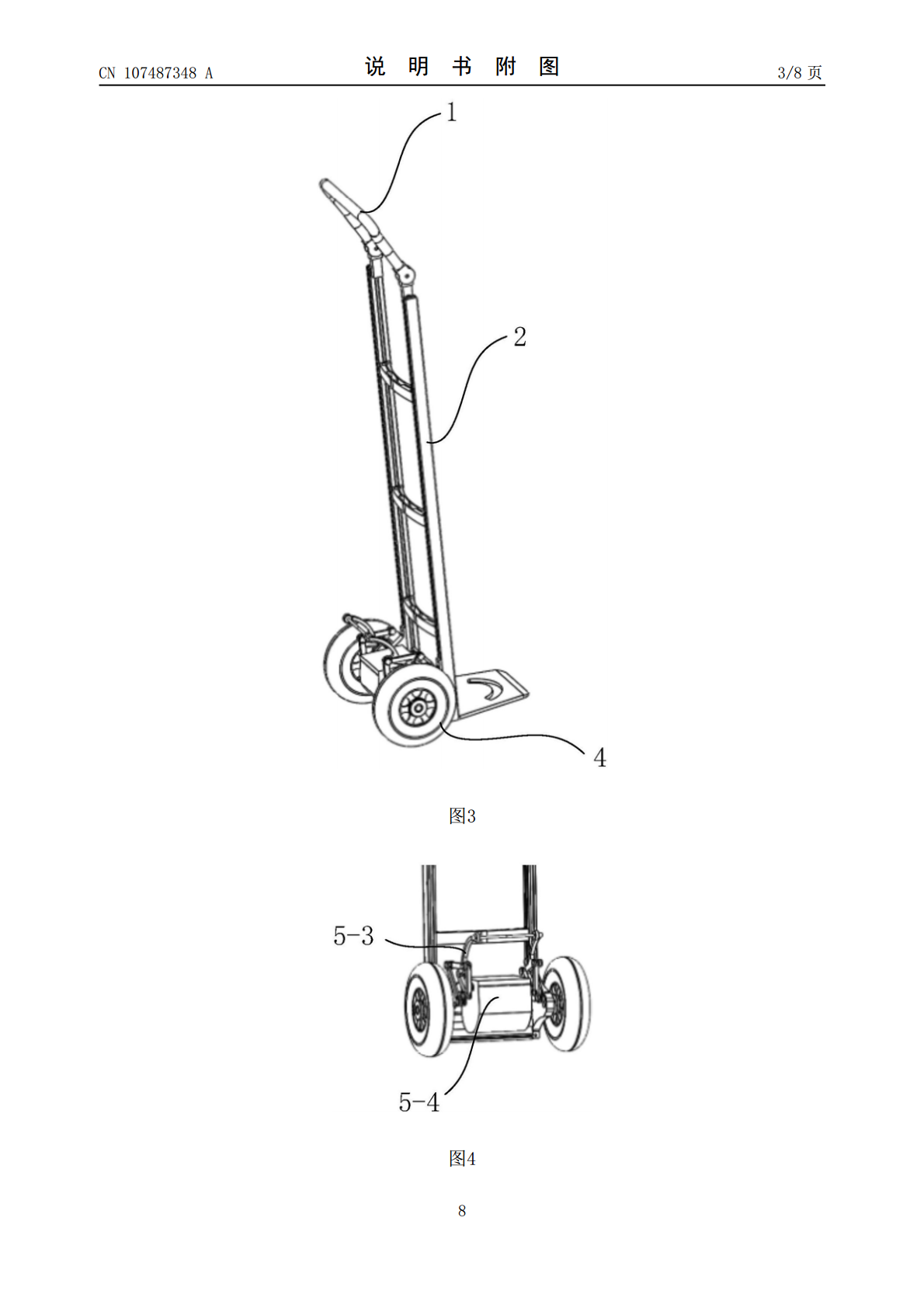
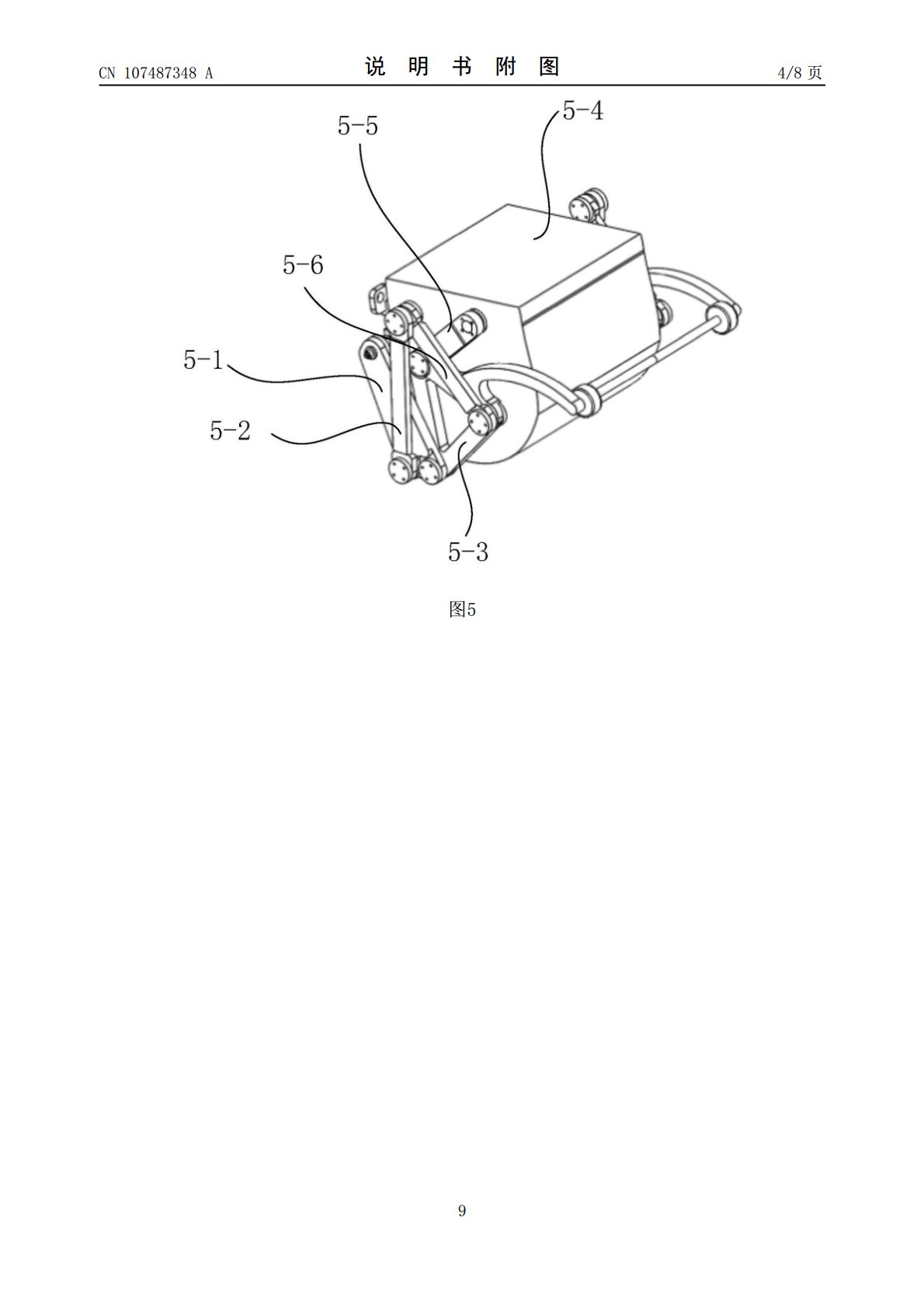
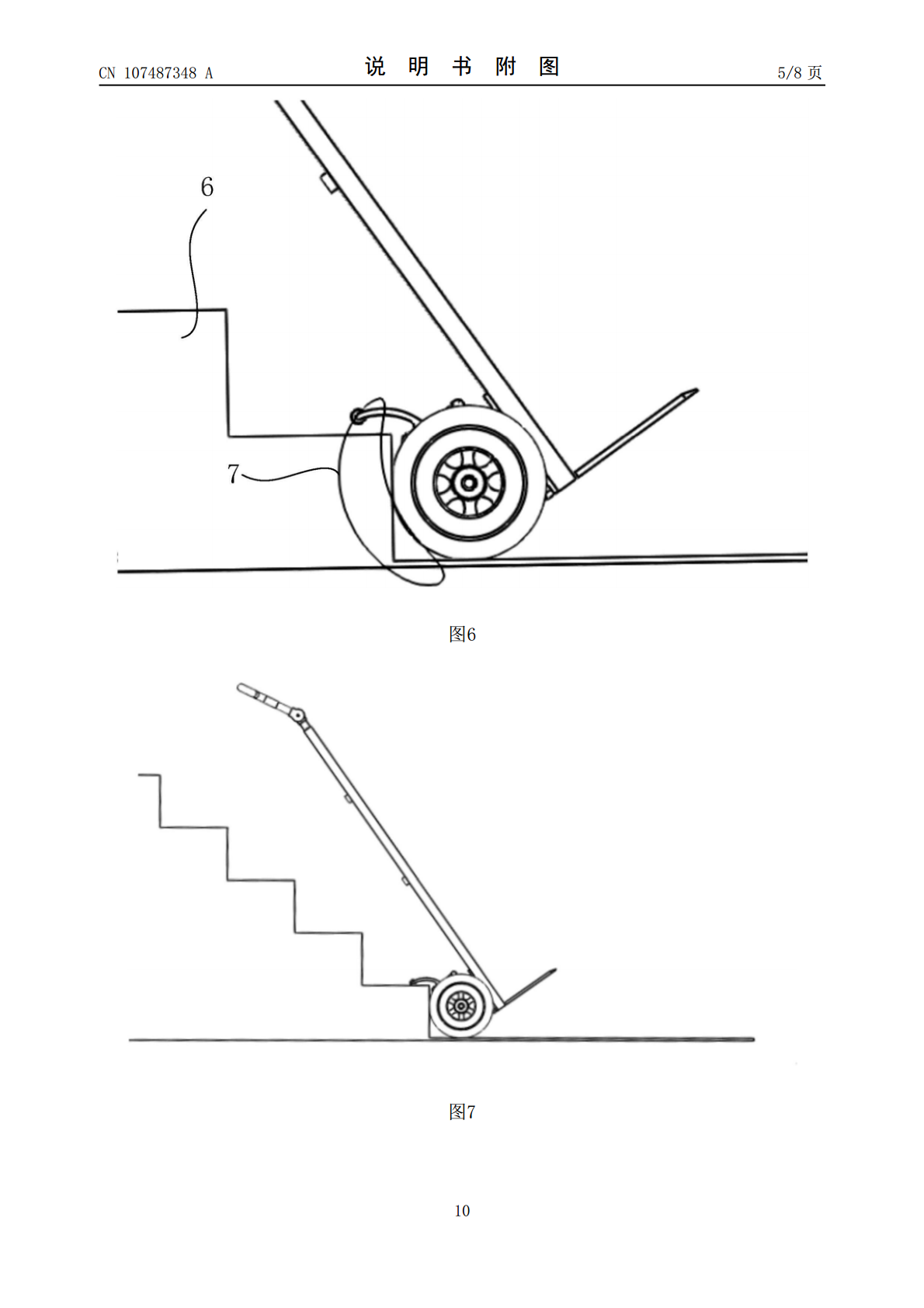
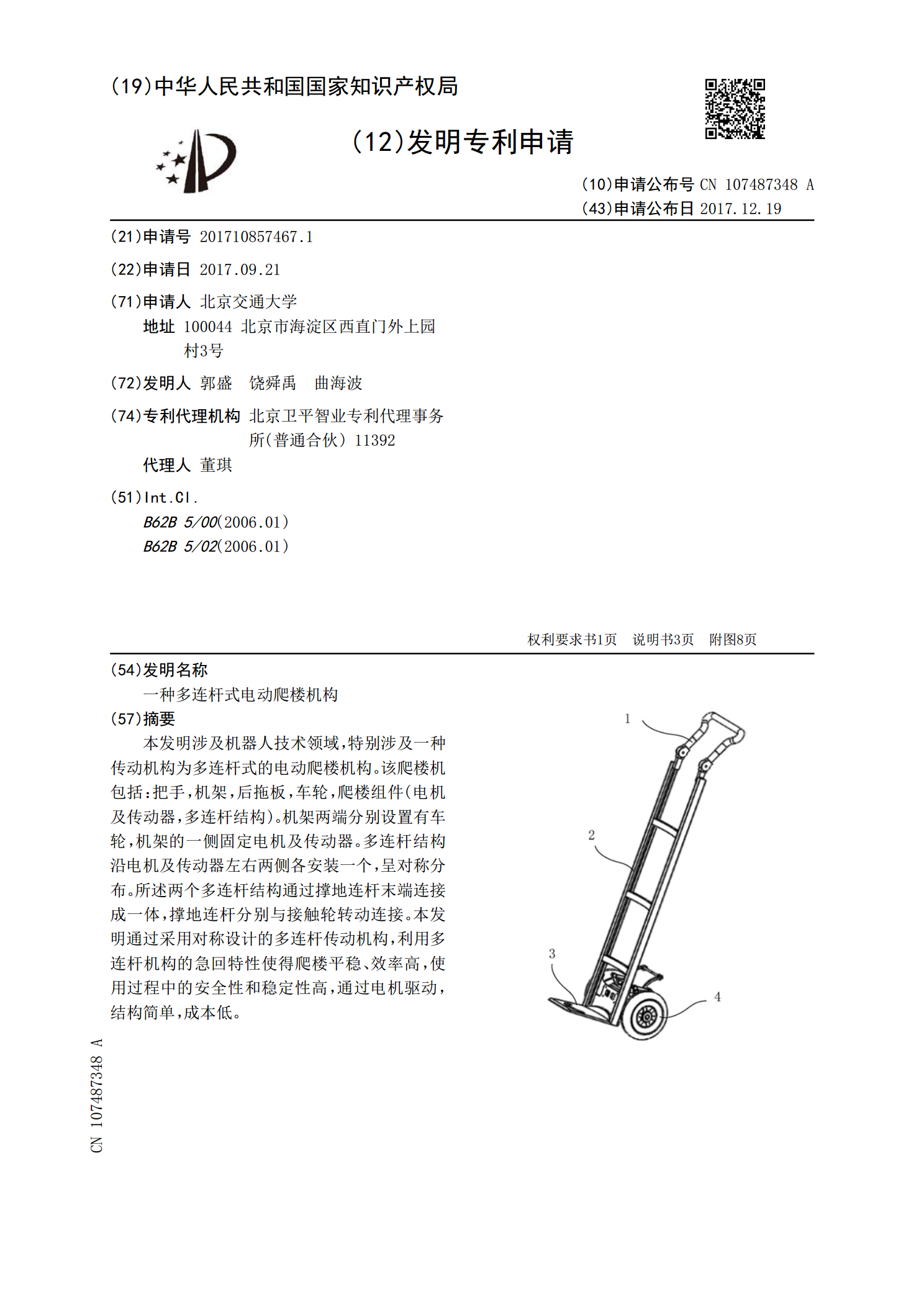
本发明涉及机器人技术领域,特别涉及一种传动机构为多连杆式的电动爬楼机构。该爬楼机包括:把手,机架,后拖板,车轮,爬楼组件(电机及传动器,多连杆结构)。机架两端分别设置有车轮,机架的一侧固定电机及传动器。多连杆结构沿电机及传动器左右两侧各安装一个,呈对称分布。所述两个多连杆结构通过撑地连杆末端连接成一体,撑地连杆分别与接触轮转动连接。本发明通过采用对称设计的多连杆传动机构,利用多连杆机构的急回特性使得爬楼平稳、效率高,使用过程中的安全性和稳定性高,通过电机驱动,结构简单,成本低。
一种基于曲柄滑块机构的电动爬楼机构.pdf
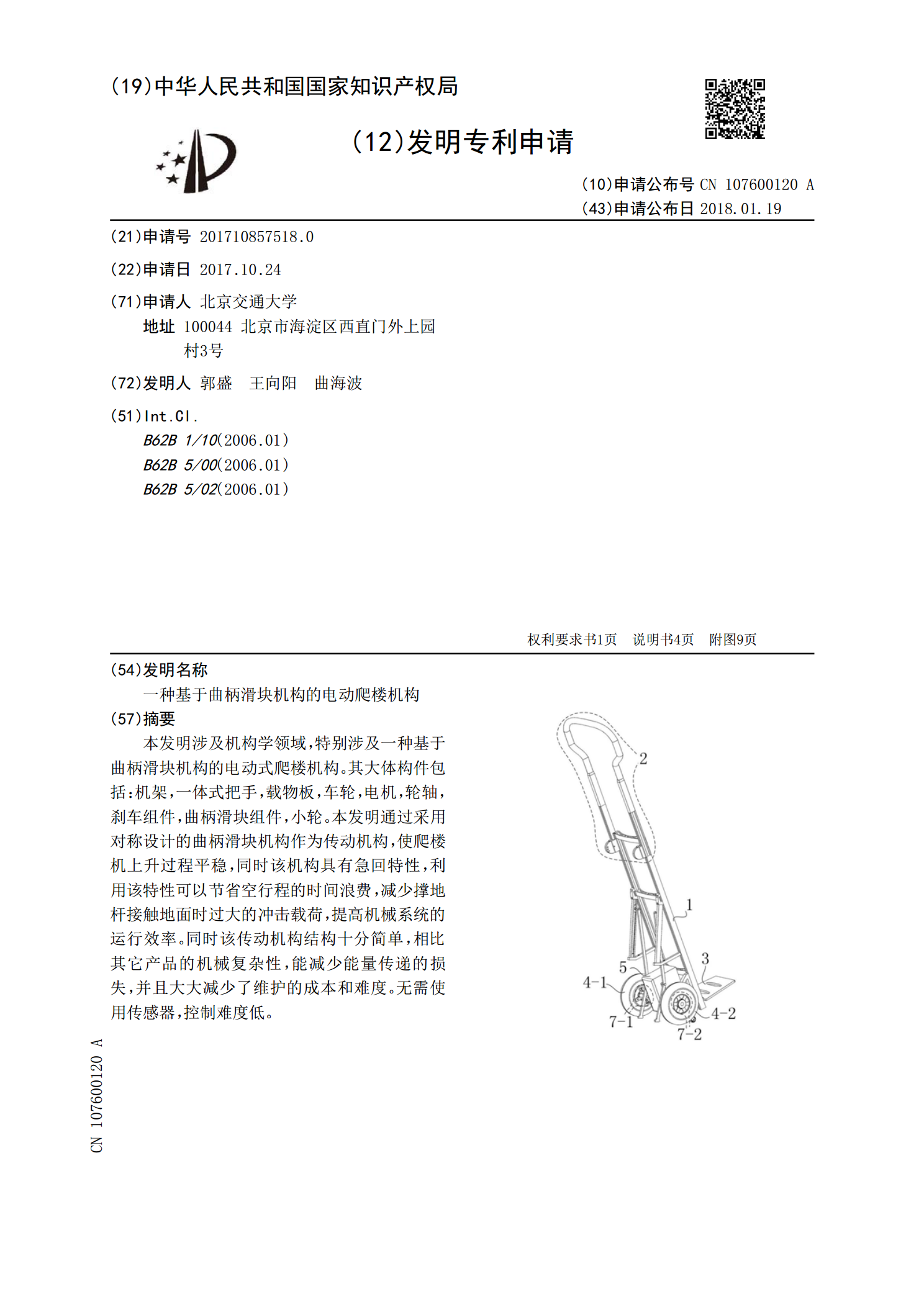
本发明涉及机构学领域,特别涉及一种基于曲柄滑块机构的电动式爬楼机构。其大体构件包括:机架,一体式把手,载物板,车轮,电机,轮轴,刹车组件,曲柄滑块组件,小轮。本发明通过采用对称设计的曲柄滑块机构作为传动机构,使爬楼机上升过程平稳,同时该机构具有急回特性,利用该特性可以节省空行程的时间浪费,减少撑地杆接触地面时过大的冲击载荷,提高机械系统的运行效率。同时该传动机构结构十分简单,相比其它产品的机械复杂性,能减少能量传递的损失,并且大大减少了维护的成本和难度。无需使用传感器,控制难度低。
一种连杆式爬楼轮椅.pdf
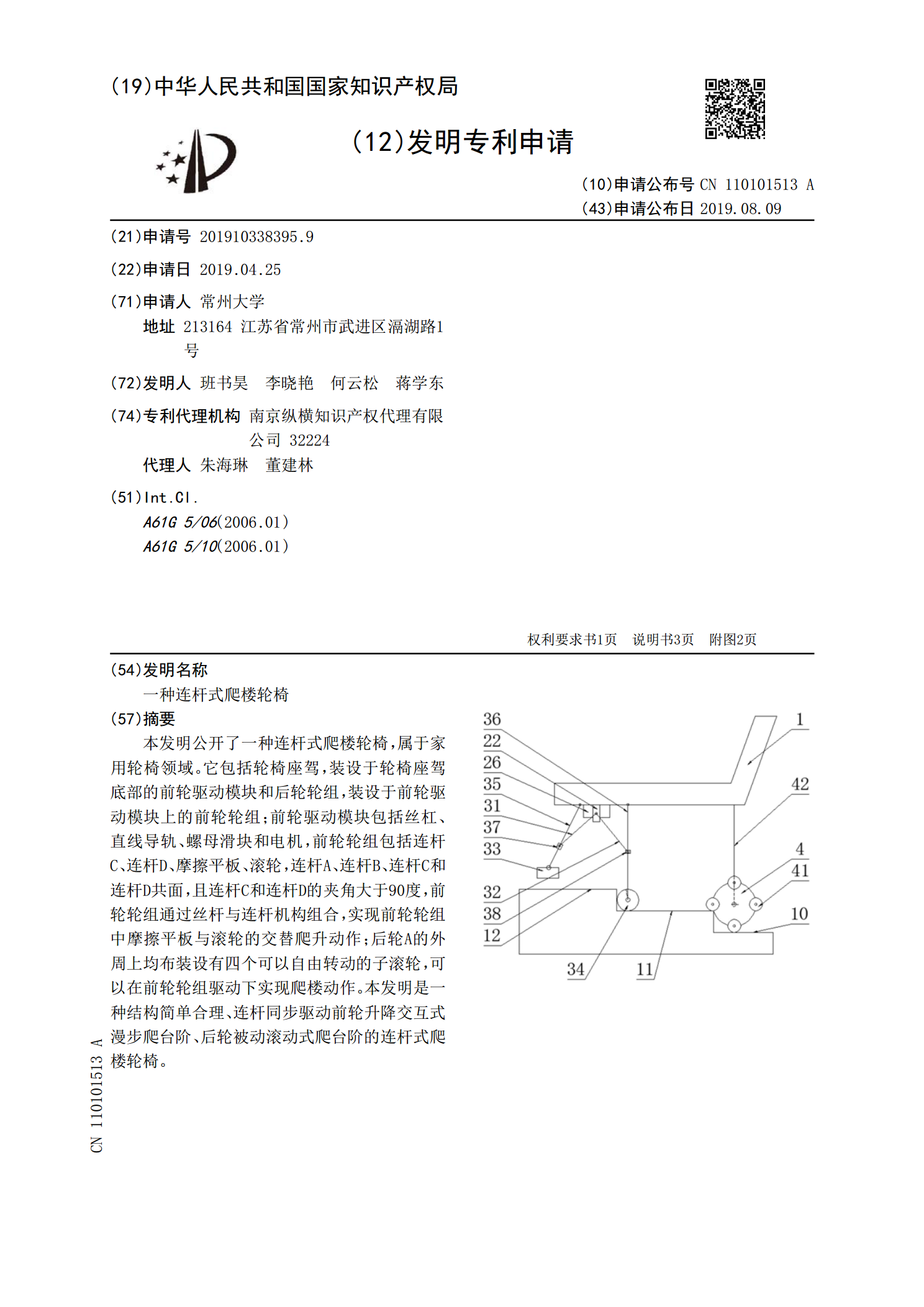
本发明公开了一种连杆式爬楼轮椅,属于家用轮椅领域。它包括轮椅座驾,装设于轮椅座驾底部的前轮驱动模块和后轮轮组,装设于前轮驱动模块上的前轮轮组;前轮驱动模块包括丝杠、直线导轨、螺母滑块和电机,前轮轮组包括连杆C、连杆D、摩擦平板、滚轮,连杆A、连杆B、连杆C和连杆D共面,且连杆C和连杆D的夹角大于90度,前轮轮组通过丝杆与连杆机构组合,实现前轮轮组中摩擦平板与滚轮的交替爬升动作;后轮A的外周上均布装设有四个可以自由转动的子滚轮,可以在前轮轮组驱动下实现爬楼动作。本发明是一种结构简单合理、连杆同步驱动前轮升降
一种带有刹车装置的电动爬楼机构.pdf
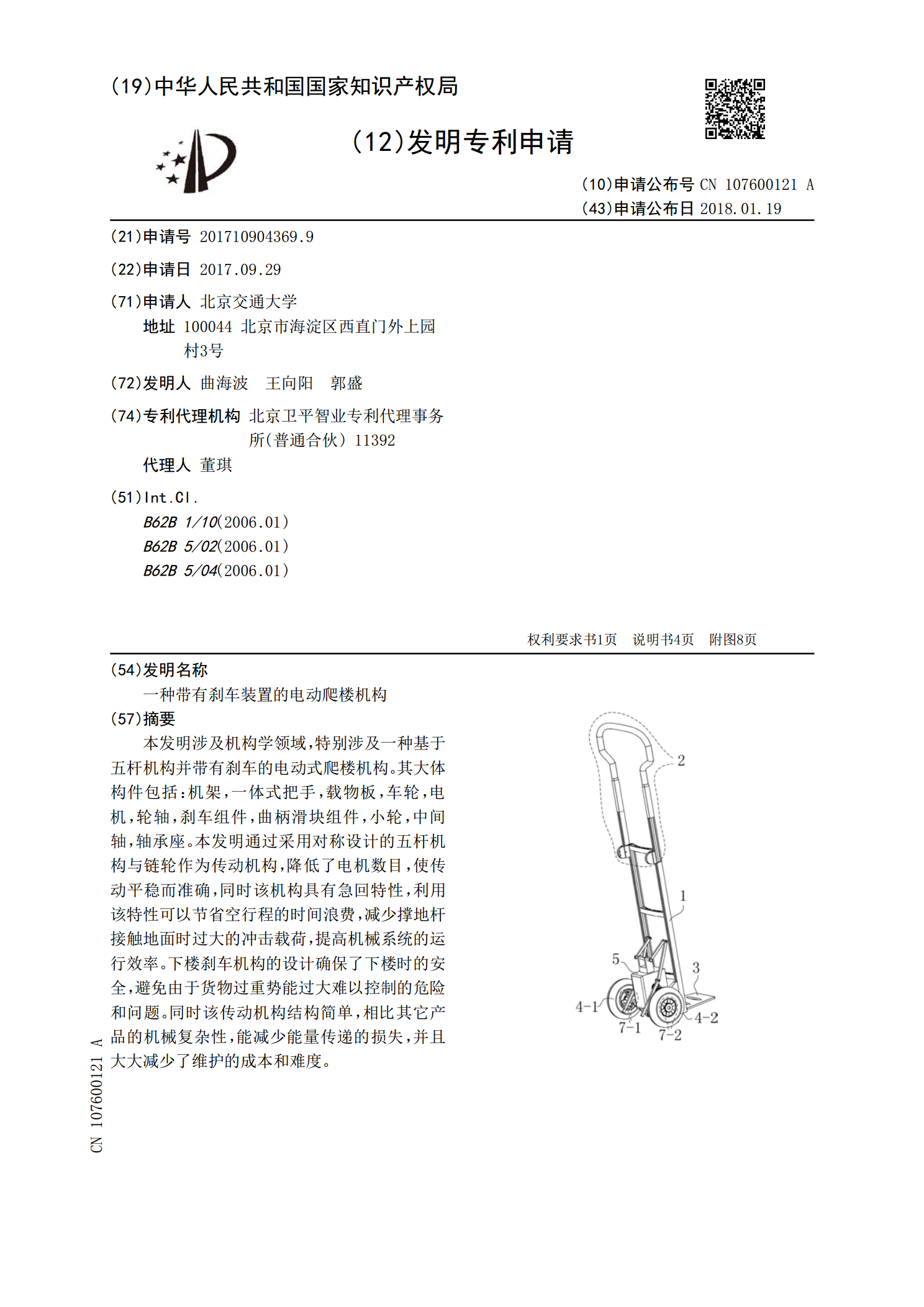
本发明涉及机构学领域,特别涉及一种基于五杆机构并带有刹车的电动式爬楼机构。其大体构件包括:机架,一体式把手,载物板,车轮,电机,轮轴,刹车组件,曲柄滑块组件,小轮,中间轴,轴承座。本发明通过采用对称设计的五杆机构与链轮作为传动机构,降低了电机数目,使传动平稳而准确,同时该机构具有急回特性,利用该特性可以节省空行程的时间浪费,减少撑地杆接触地面时过大的冲击载荷,提高机械系统的运行效率。下楼刹车机构的设计确保了下楼时的安全,避免由于货物过重势能过大难以控制的危险和问题。同时该传动机构结构简单,相比其它产品的机
一种基于五杆机构的电动爬楼装置.pdf
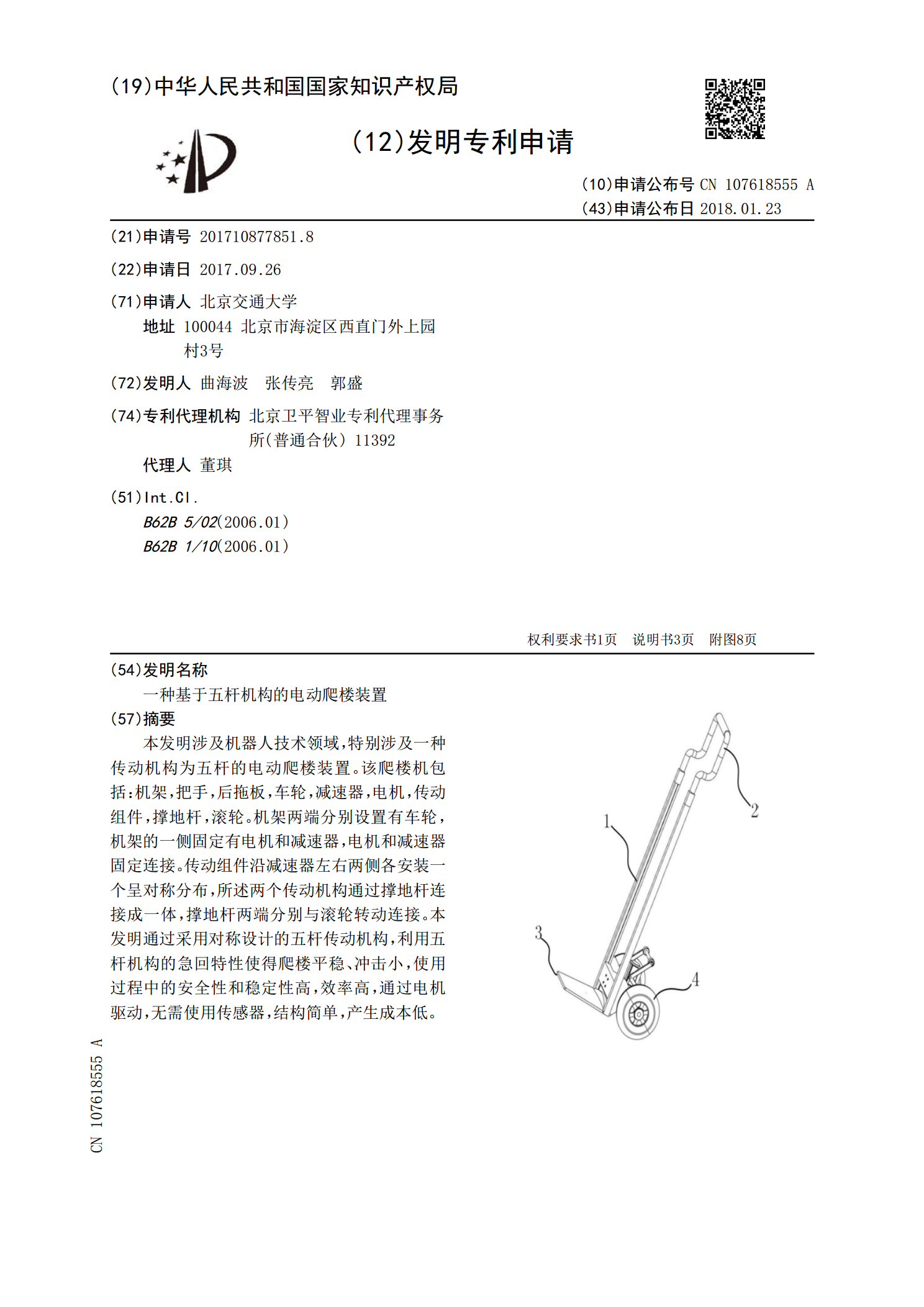
本发明涉及机器人技术领域,特别涉及一种传动机构为五杆的电动爬楼装置。该爬楼机包括:机架,把手,后拖板,车轮,减速器,电机,传动组件,撑地杆,滚轮。机架两端分别设置有车轮,机架的一侧固定有电机和减速器,电机和减速器固定连接。传动组件沿减速器左右两侧各安装一个呈对称分布,所述两个传动机构通过撑地杆连接成一体,撑地杆两端分别与滚轮转动连接。本发明通过采用对称设计的五杆传动机构,利用五杆机构的急回特性使得爬楼平稳、冲击小,使用过程中的安全性和稳定性高,效率高,通过电机驱动,无需使用传感器,结构简单,产生成本低。