
一种可高度调节的智能化轮椅.pdf

是你****馨呀

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可高度调节的智能化轮椅.pdf
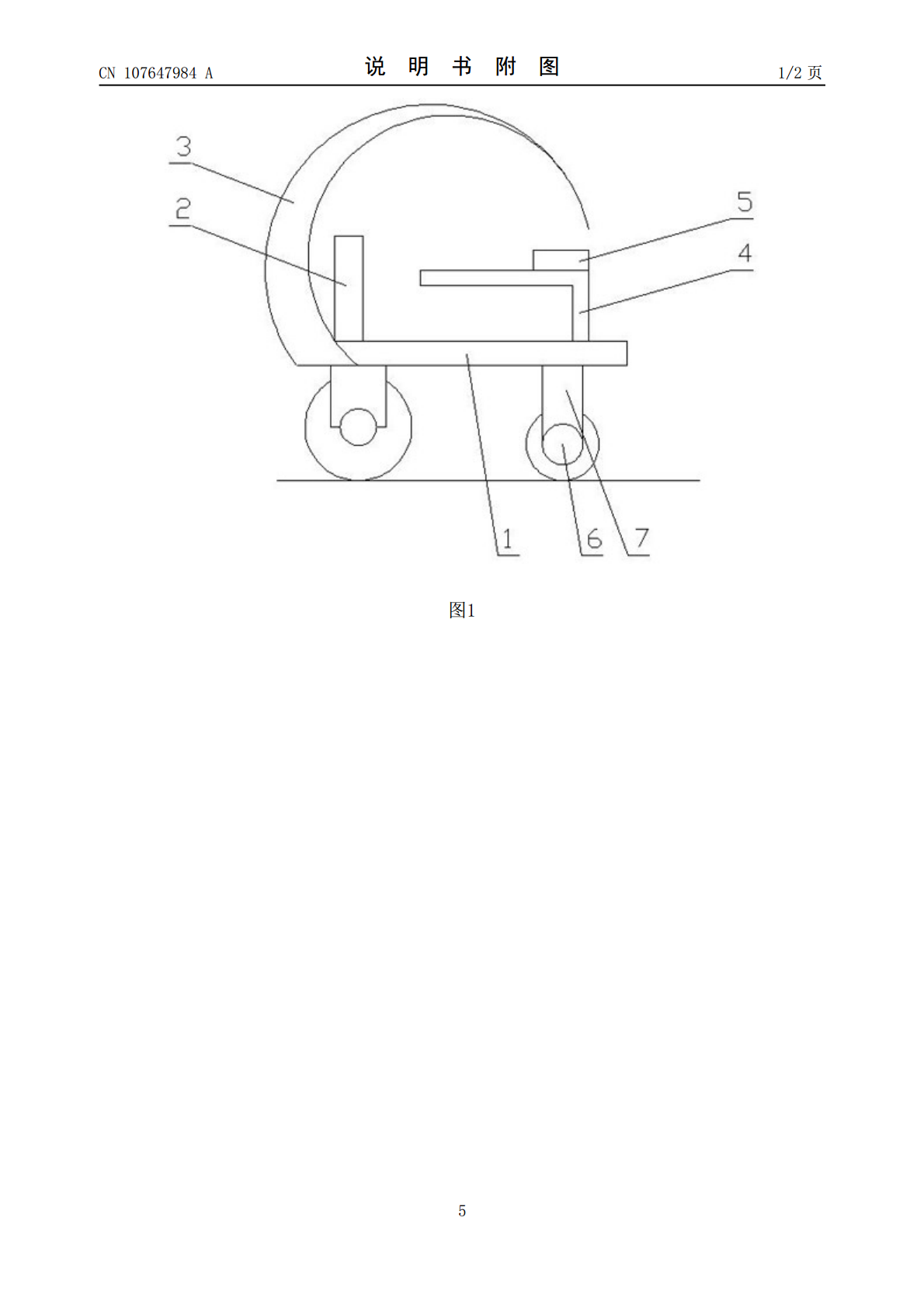
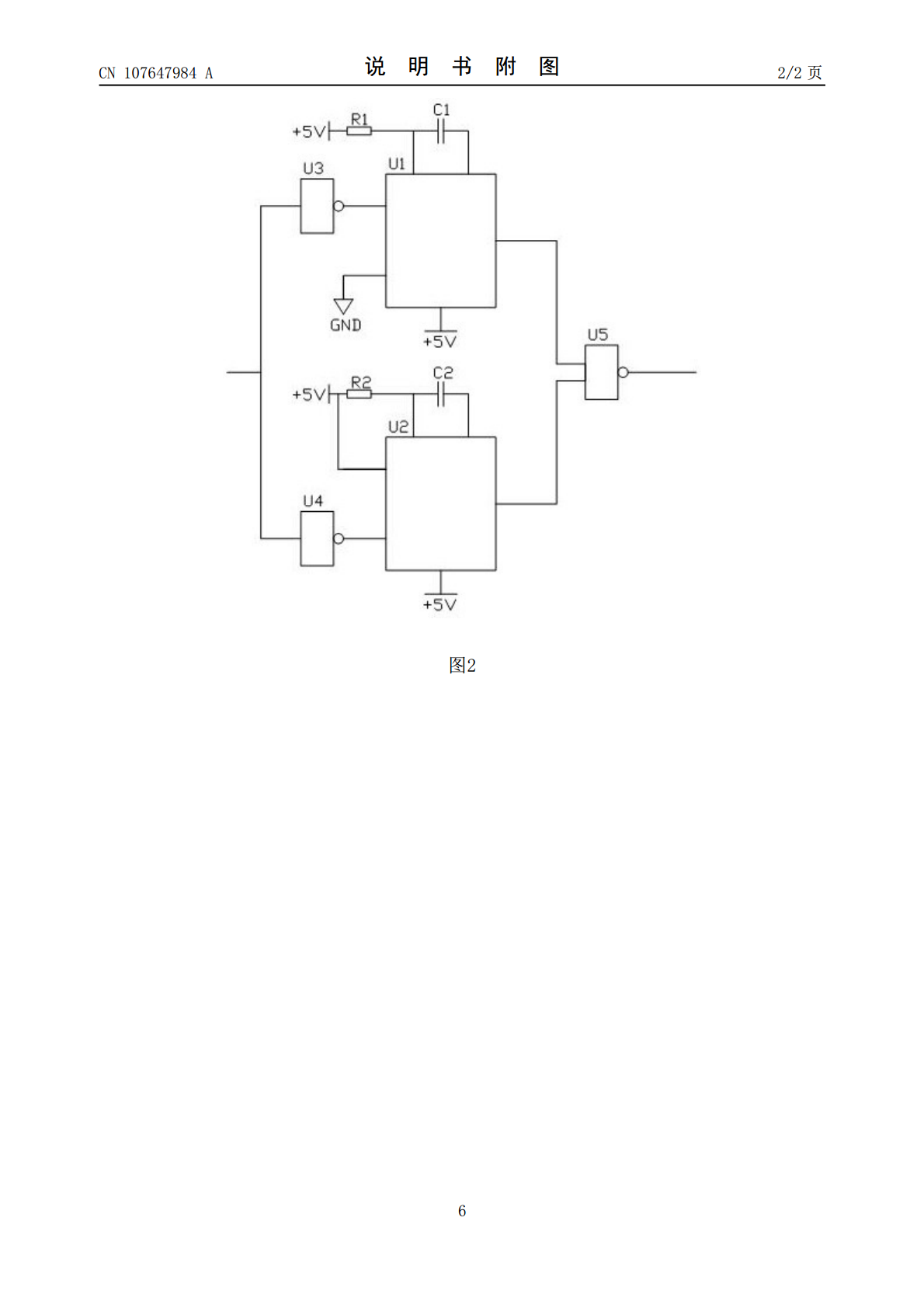
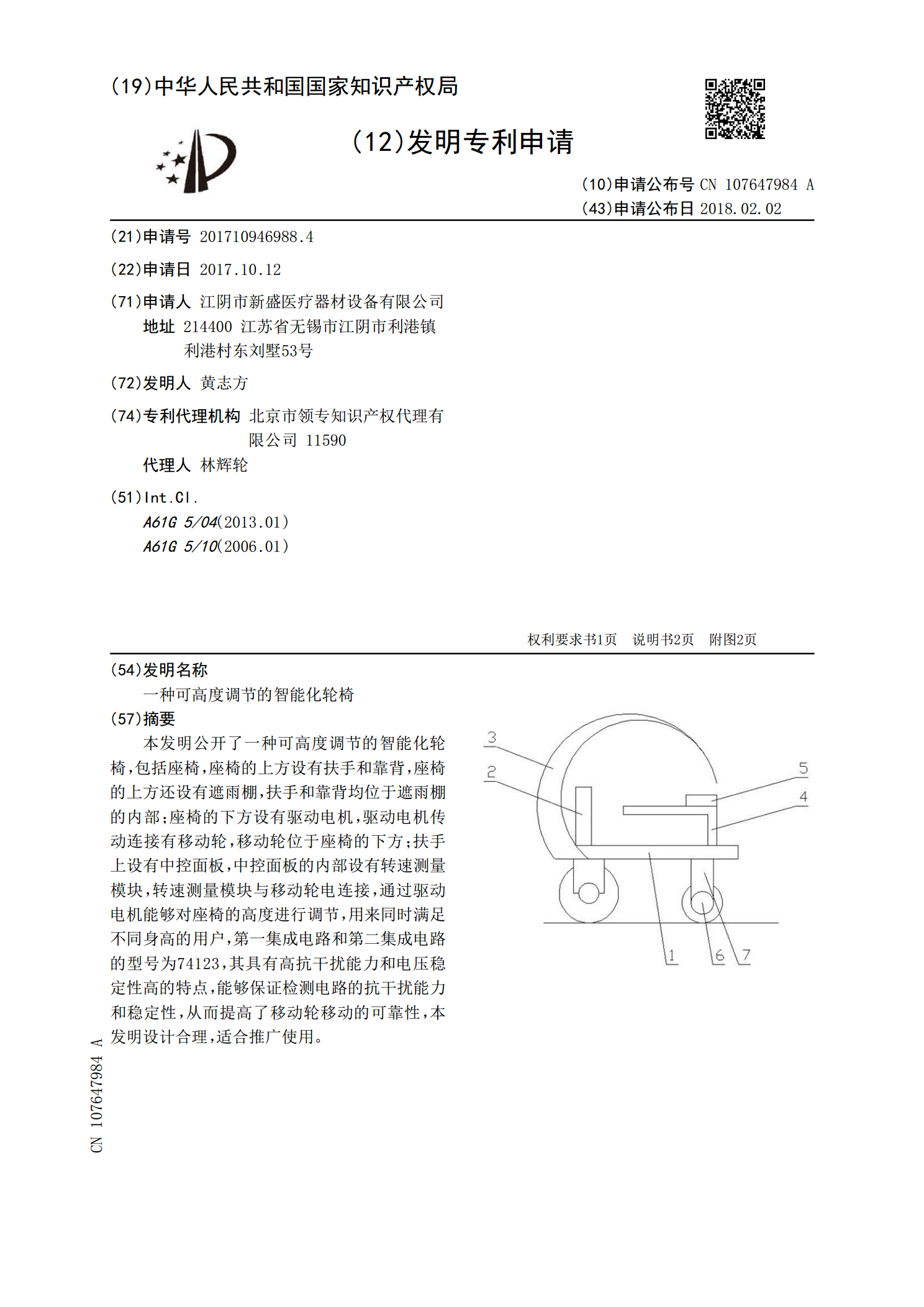
本发明公开了一种可高度调节的智能化轮椅,包括座椅,座椅的上方设有扶手和靠背,座椅的上方还设有遮雨棚,扶手和靠背均位于遮雨棚的内部;座椅的下方设有驱动电机,驱动电机传动连接有移动轮,移动轮位于座椅的下方;扶手上设有中控面板,中控面板的内部设有转速测量模块,转速测量模块与移动轮电连接,通过驱动电机能够对座椅的高度进行调节,用来同时满足不同身高的用户,第一集成电路和第二集成电路的型号为74123,其具有高抗干扰能力和电压稳定性高的特点,能够保证检测电路的抗干扰能力和稳定性,从而提高了移动轮移动的可靠性,本发明设
一种可连续调节轮椅座椅高度的手摇装置及其方法、轮椅.pdf
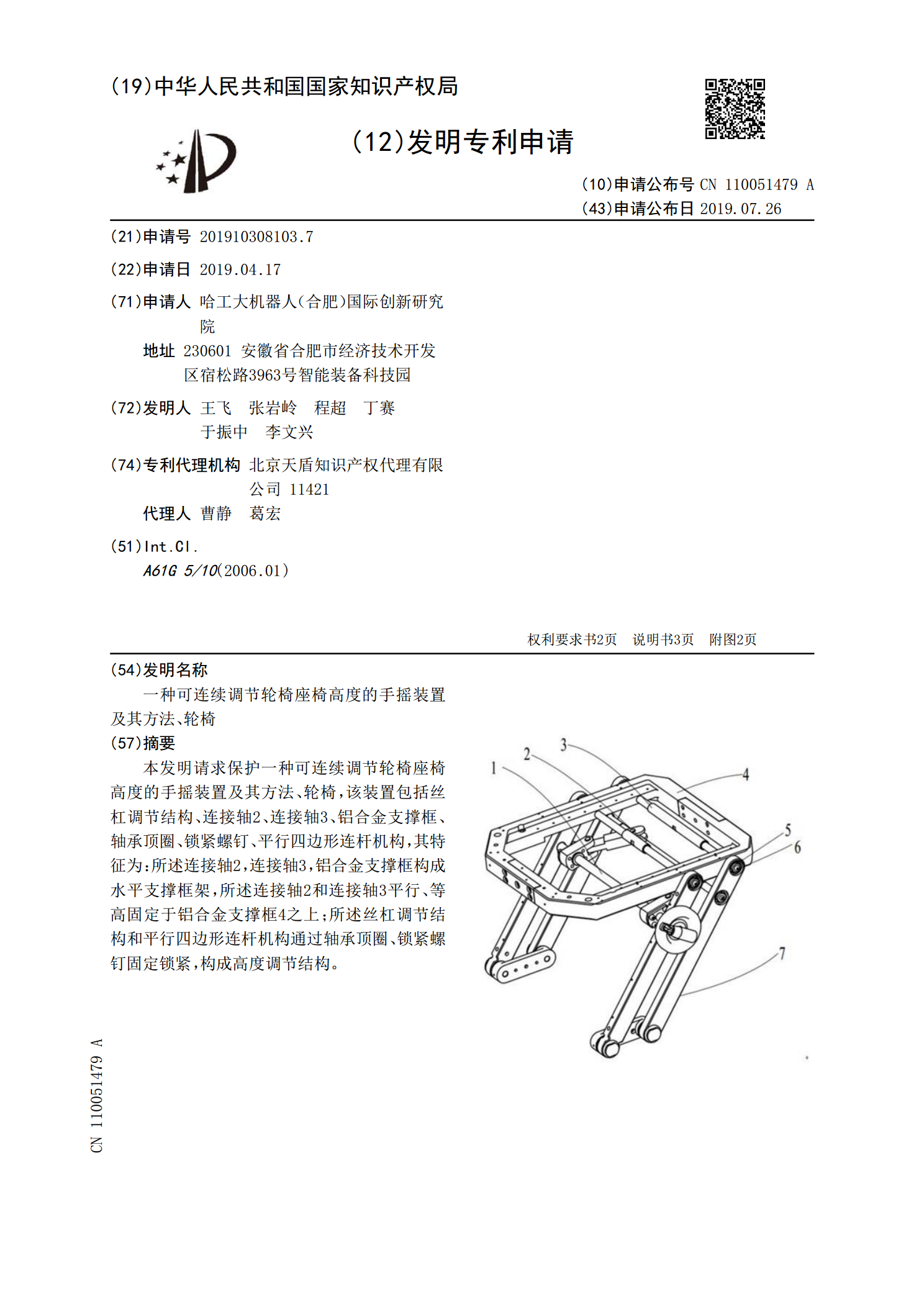
本发明请求保护一种可连续调节轮椅座椅高度的手摇装置及其方法、轮椅,该装置包括丝杠调节结构、连接轴2、连接轴3、铝合金支撑框、轴承顶圈、锁紧螺钉、平行四边形连杆机构,其特征为:所述连接轴2,连接轴3,铝合金支撑框构成水平支撑框架,所述连接轴2和连接轴3平行、等高固定于铝合金支撑框4之上;所述丝杠调节结构和平行四边形连杆机构通过轴承顶圈、锁紧螺钉固定锁紧,构成高度调节结构。
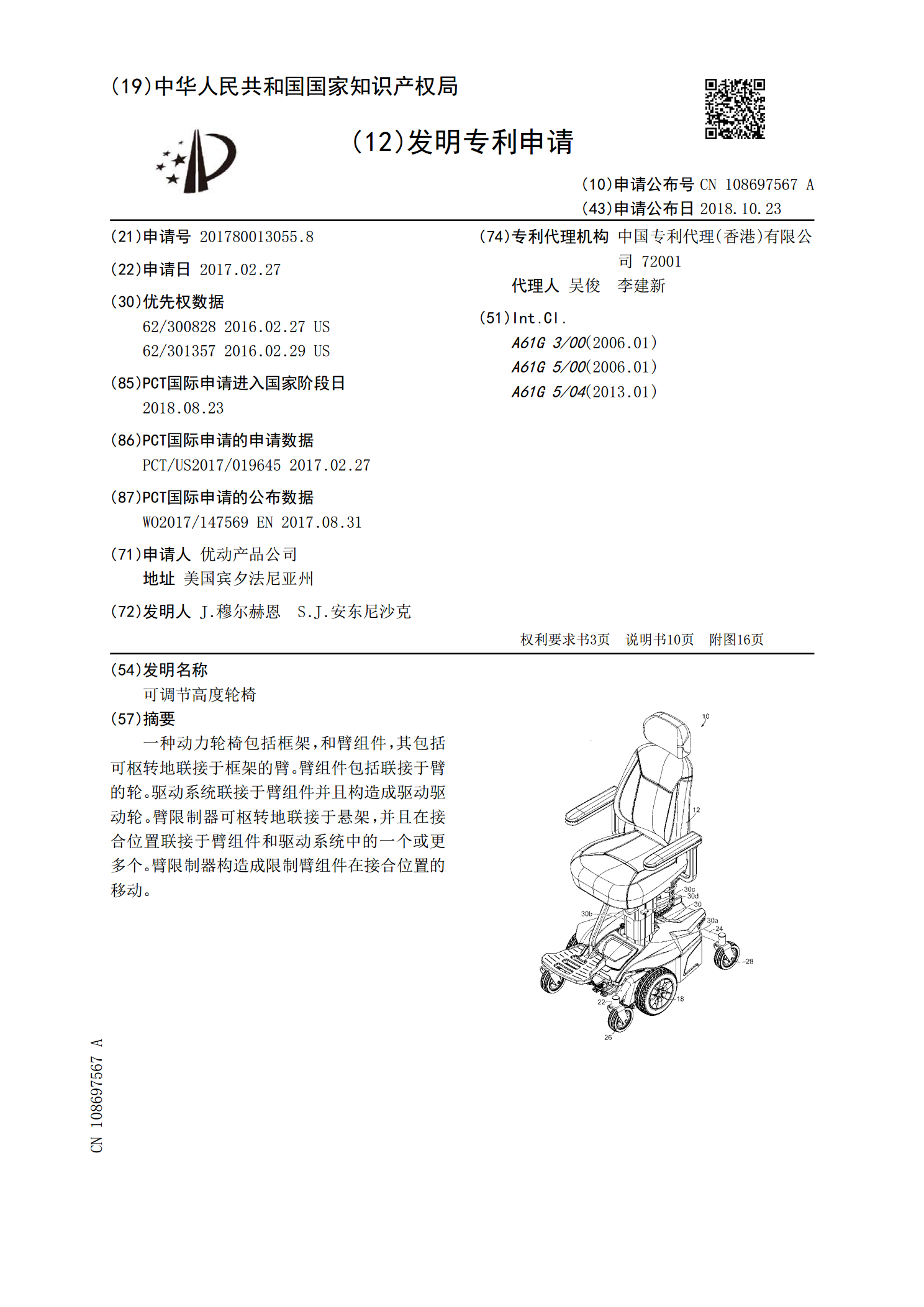
可调节高度轮椅.pdf
一种动力轮椅包括框架,和臂组件,其包括可枢转地联接于框架的臂。臂组件包括联接于臂的轮。驱动系统联接于臂组件并且构造成驱动驱动轮。臂限制器可枢转地联接于悬架,并且在接合位置联接于臂组件和驱动系统中的一个或更多个。臂限制器构造成限制臂组件在接合位置的移动。
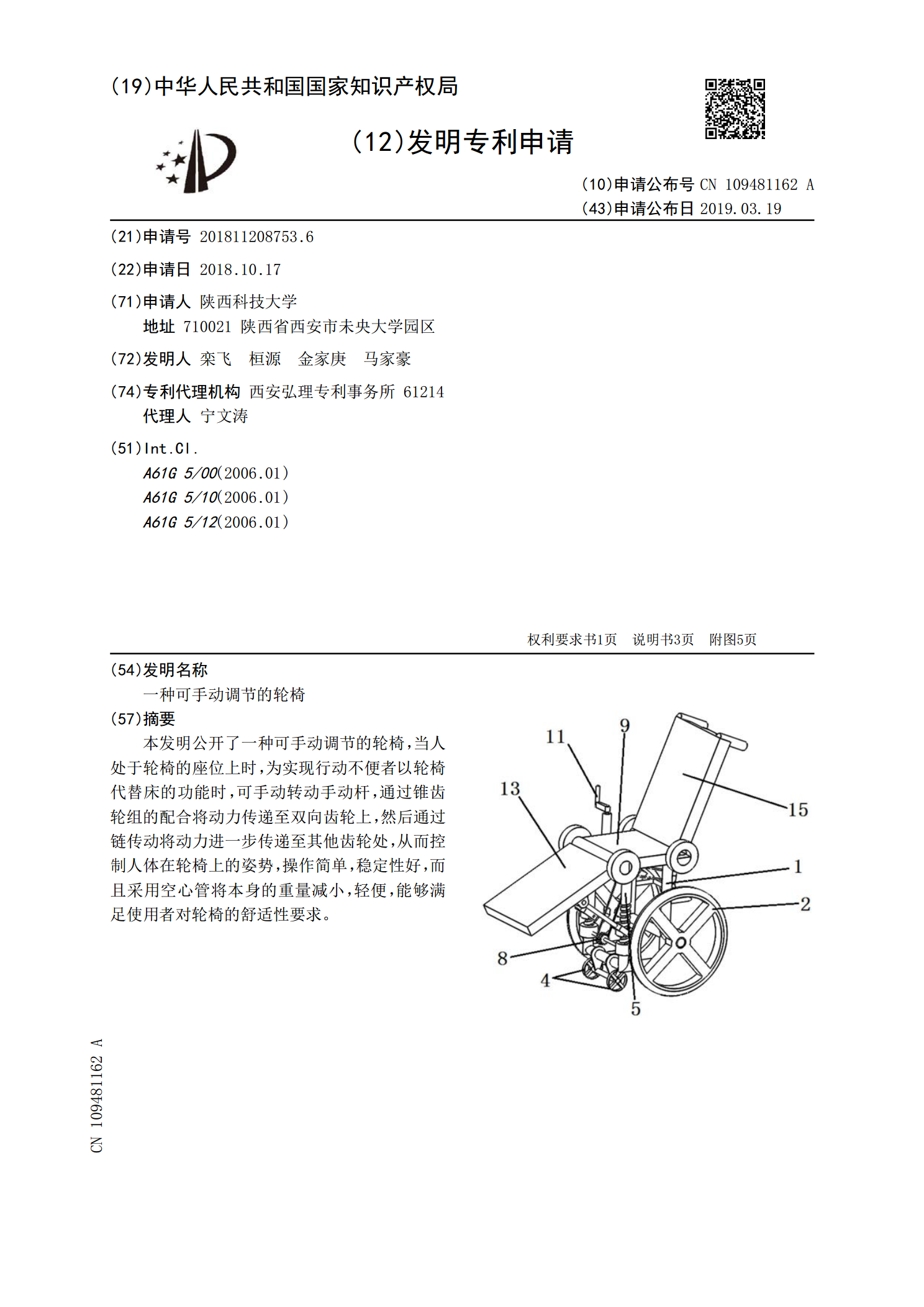
一种可手动调节的轮椅.pdf
本发明公开了一种可手动调节的轮椅,当人处于轮椅的座位上时,为实现行动不便者以轮椅代替床的功能时,可手动转动手动杆,通过锥齿轮组的配合将动力传递至双向齿轮上,然后通过链传动将动力进一步传递至其他齿轮处,从而控制人体在轮椅上的姿势,操作简单,稳定性好,而且采用空心管将本身的重量减小,轻便,能够满足使用者对轮椅的舒适性要求。
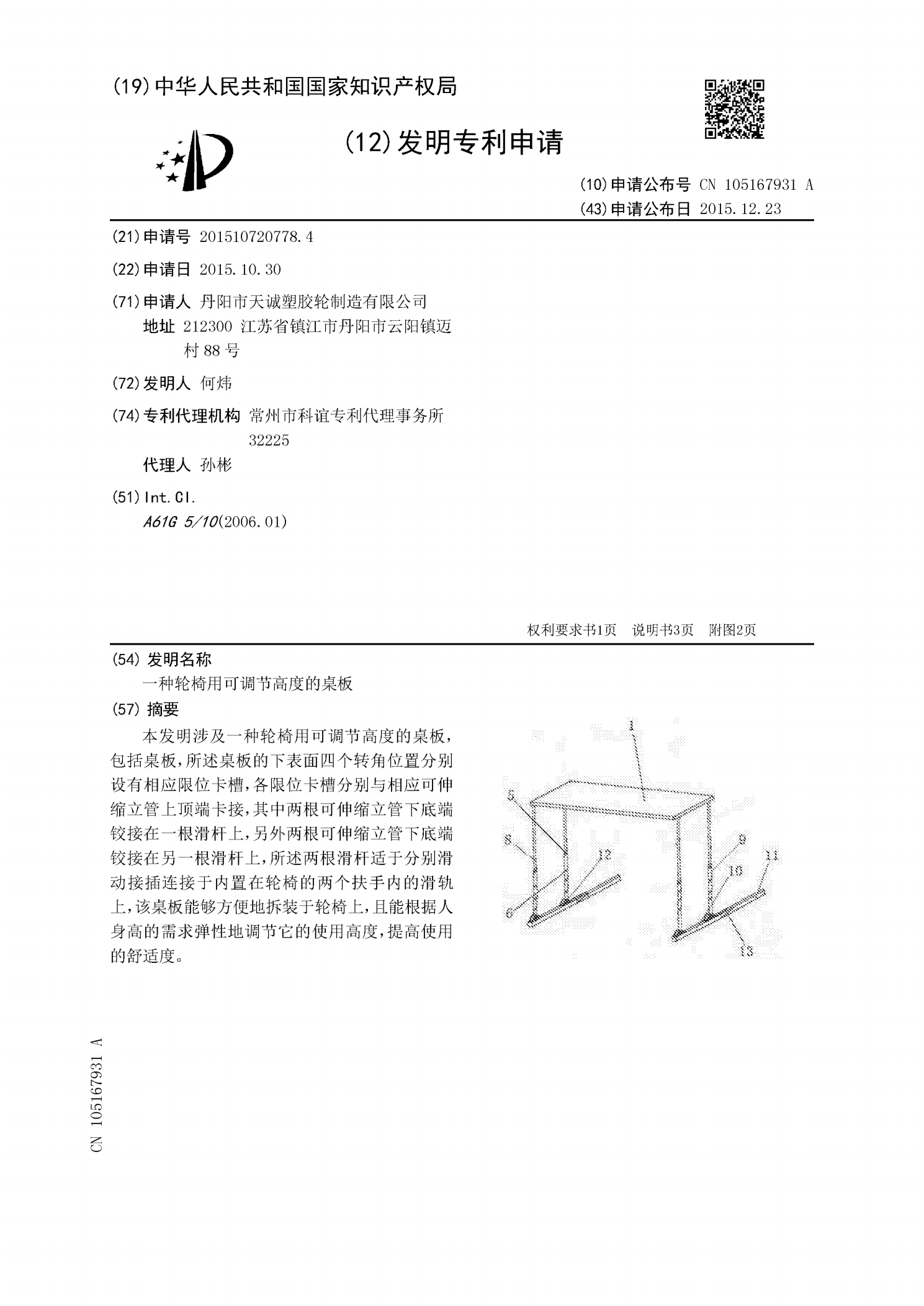
一种轮椅用可调节高度的桌板.pdf
本发明涉及一种轮椅用可调节高度的桌板,包括桌板,所述桌板的下表面四个转角位置分别设有相应限位卡槽,各限位卡槽分别与相应可伸缩立管上顶端卡接,其中两根可伸缩立管下底端铰接在一根滑杆上,另外两根可伸缩立管下底端铰接在另一根滑杆上,所述两根滑杆适于分别滑动接插连接于内置在轮椅的两个扶手内的滑轨上,该桌板能够方便地拆装于轮椅上,且能根据人身高的需求弹性地调节它的使用高度,提高使用的舒适度。