
一种新型抓胎装置.pdf

Wi****m7


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型抓胎装置.pdf
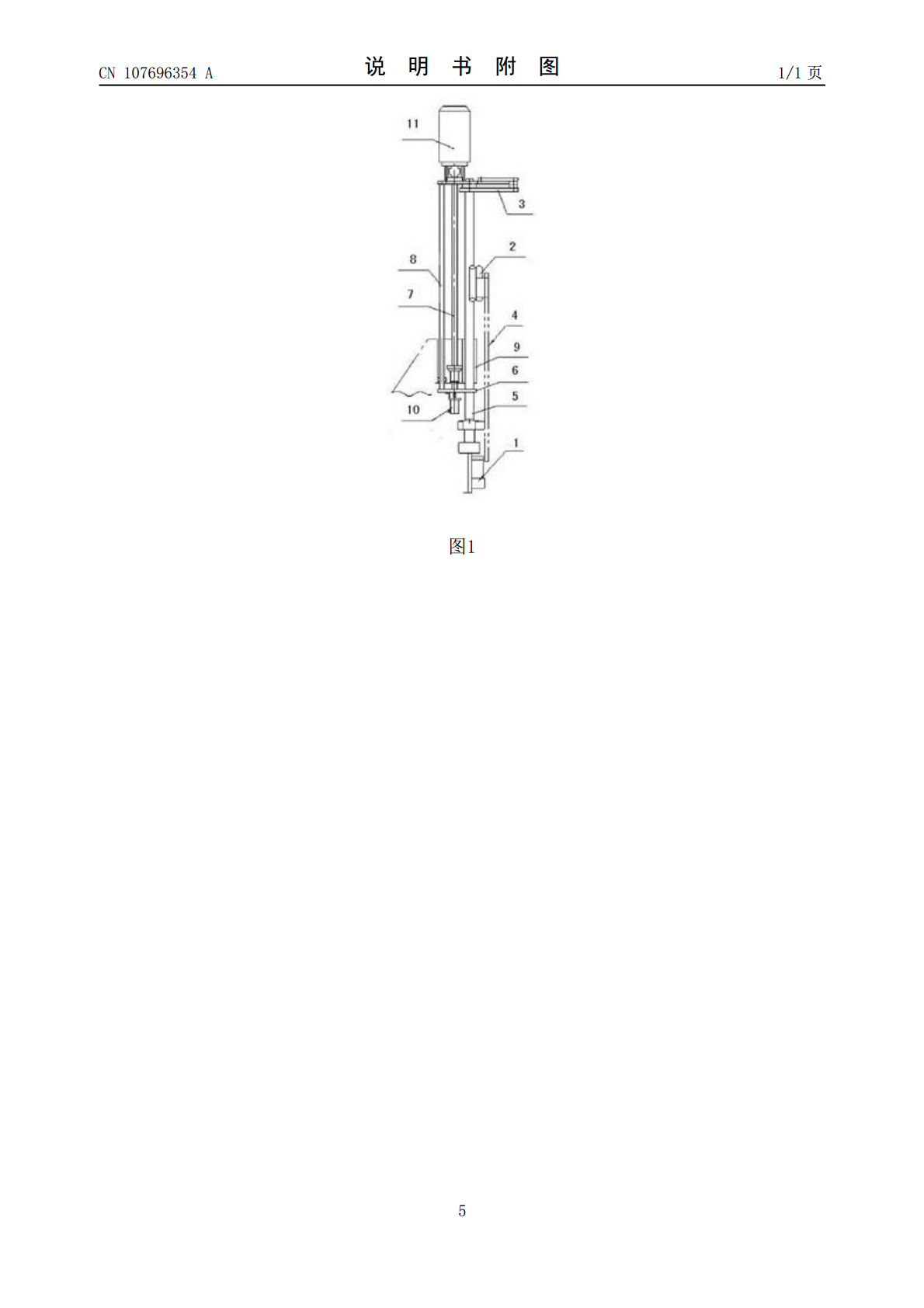
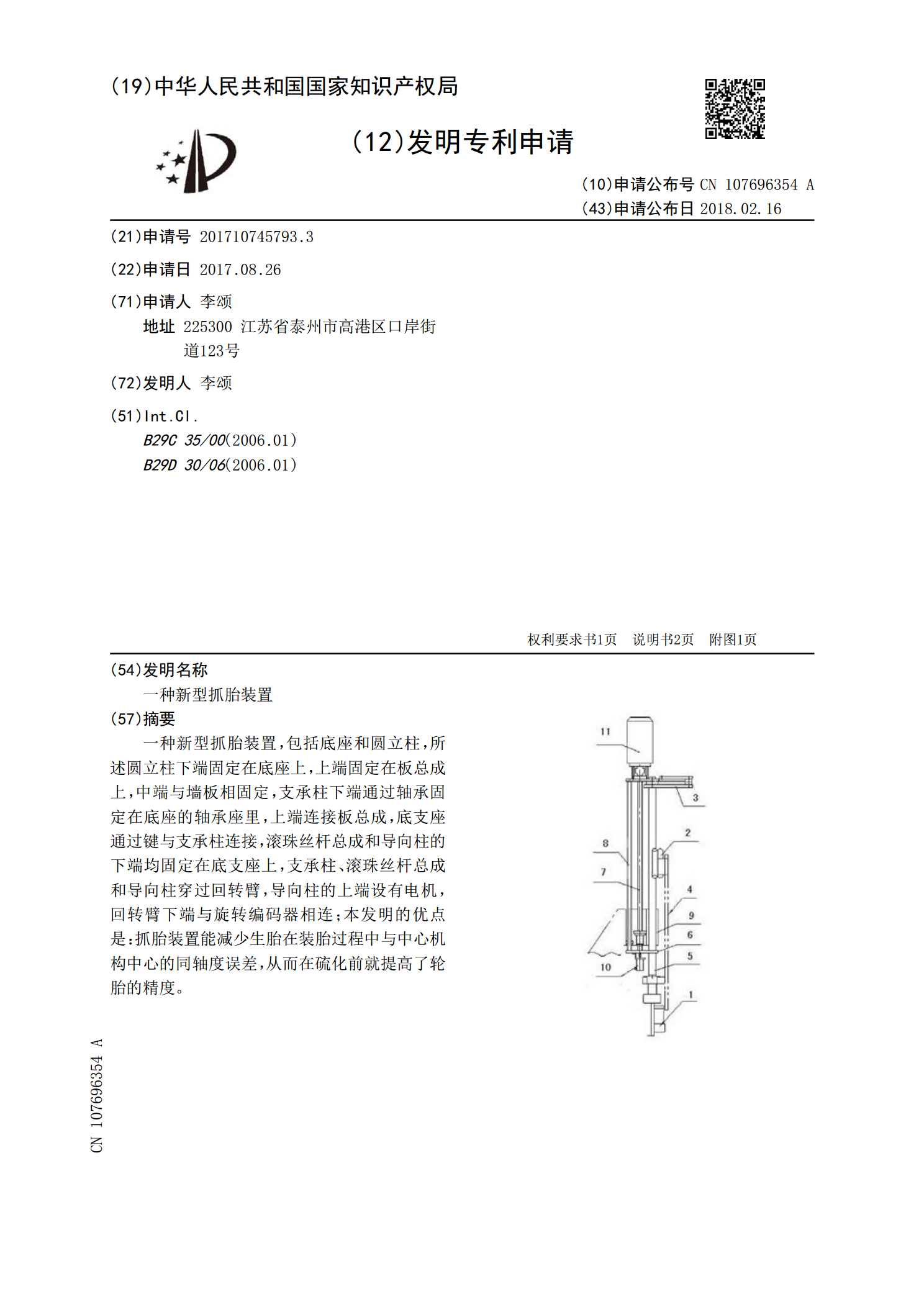
一种新型抓胎装置,包括底座和圆立柱,所述圆立柱下端固定在底座上,上端固定在板总成上,中端与墙板相固定,支承柱下端通过轴承固定在底座的轴承座里,上端连接板总成,底支座通过键与支承柱连接,滚珠丝杆总成和导向柱的下端均固定在底支座上,支承柱、滚珠丝杆总成和导向柱穿过回转臂,导向柱的上端设有电机,回转臂下端与旋转编码器相连;本发明的优点是:抓胎装置能减少生胎在装胎过程中与中心机构中心的同轴度误差,从而在硫化前就提高了轮胎的精度。

一种新型轮胎抓胎器装置.pdf
本发明涉及一种新型轮胎抓胎器装置。其技术方案是油缸、感应式定位系统、摇臂、爪片和转动盘安装于固定臂上,油缸通过活塞杆连接摇臂,感应式定位系统安装在油缸的前部或者安装在油缸的内部,利用感应式定位系统的反馈,可以实时感应并控制油缸的活塞杆移动位置,所述的摇臂与转动盘连接,转动盘的下部设有多个爪片,所述的摇臂将活塞杆的直线运动转化为转动盘旋转运动,使其驱动抓胎器爪片张开闭合。有益效果是:通过感应式定位系统控制油缸活塞杆的行程来确定抓胎器爪手张开闭合的大小,从而使抓胎器爪片的张开闭合大小实现自动化控制,使抓胎器可
一种抓胎装置.pdf
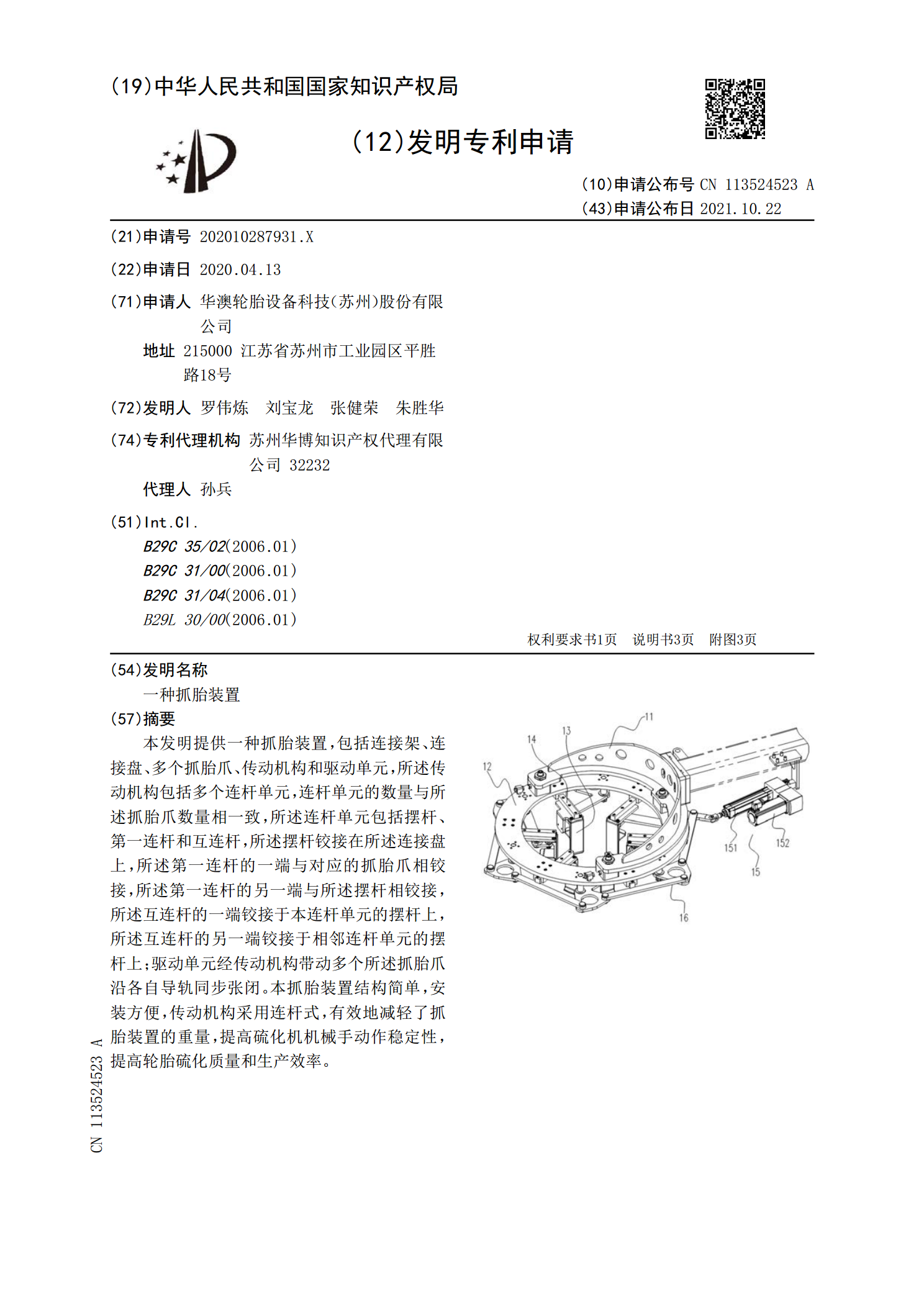
本发明提供一种抓胎装置,包括连接架、连接盘、多个抓胎爪、传动机构和驱动单元,所述传动机构包括多个连杆单元,连杆单元的数量与所述抓胎爪数量相一致,所述连杆单元包括摆杆、第一连杆和互连杆,所述摆杆铰接在所述连接盘上,所述第一连杆的一端与对应的抓胎爪相铰接,所述第一连杆的另一端与所述摆杆相铰接,所述互连杆的一端铰接于本连杆单元的摆杆上,所述互连杆的另一端铰接于相邻连杆单元的摆杆上;驱动单元经传动机构带动多个所述抓胎爪沿各自导轨同步张闭。本抓胎装置结构简单,安装方便,传动机构采用连杆式,有效地减轻了抓胎装置的重量
一种新型雪地胎胎钉伸缩装置.pdf
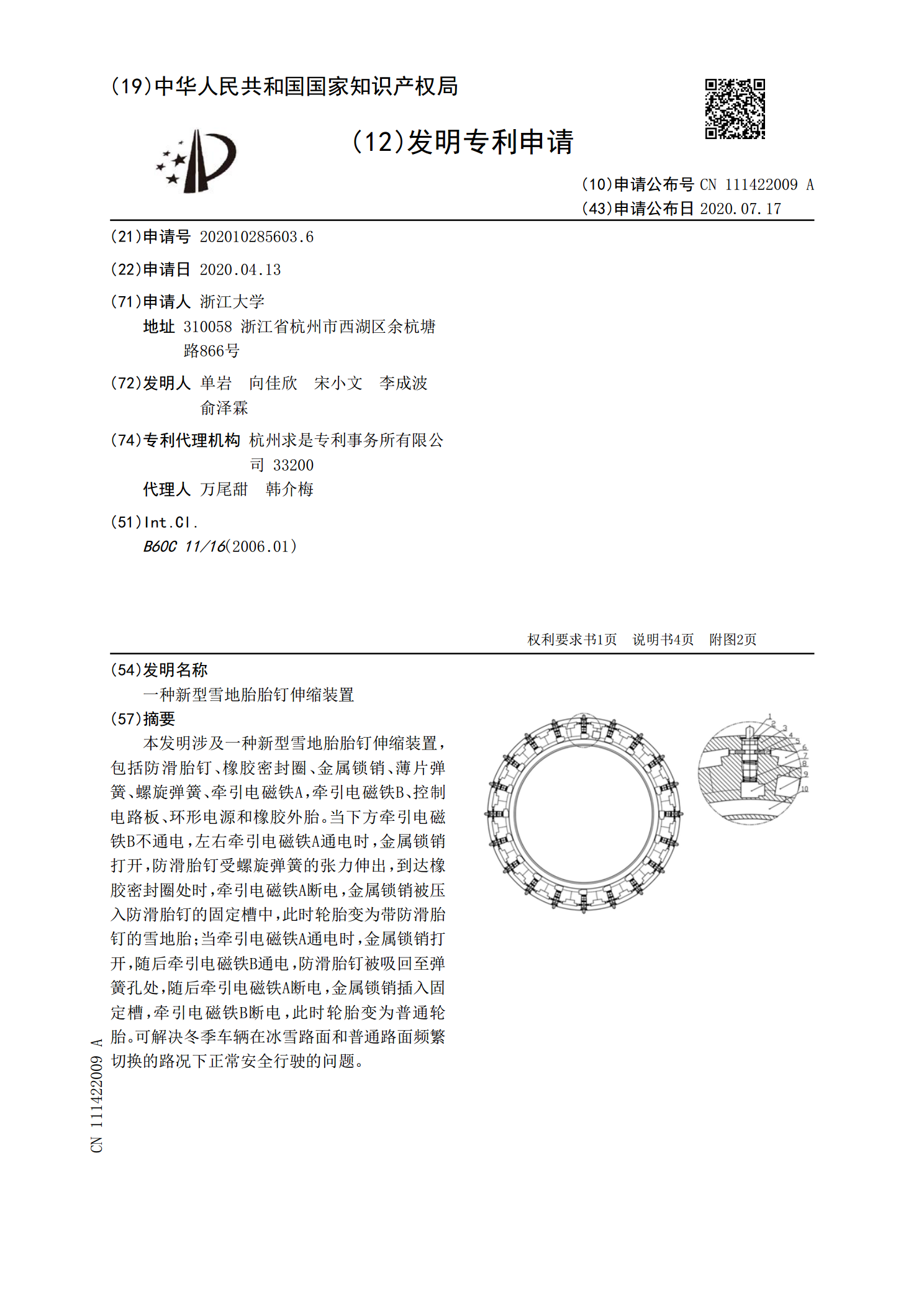
本发明涉及一种新型雪地胎胎钉伸缩装置,包括防滑胎钉、橡胶密封圈、金属锁销、薄片弹簧、螺旋弹簧、牵引电磁铁A,牵引电磁铁B、控制电路板、环形电源和橡胶外胎。当下方牵引电磁铁B不通电,左右牵引电磁铁A通电时,金属锁销打开,防滑胎钉受螺旋弹簧的张力伸出,到达橡胶密封圈处时,牵引电磁铁A断电,金属锁销被压入防滑胎钉的固定槽中,此时轮胎变为带防滑胎钉的雪地胎;当牵引电磁铁A通电时,金属锁销打开,随后牵引电磁铁B通电,防滑胎钉被吸回至弹簧孔处,随后牵引电磁铁A断电,金属锁销插入固定槽,牵引电磁铁B断电,此时轮胎变为普
一种新型白胎侧挤出装置.pdf
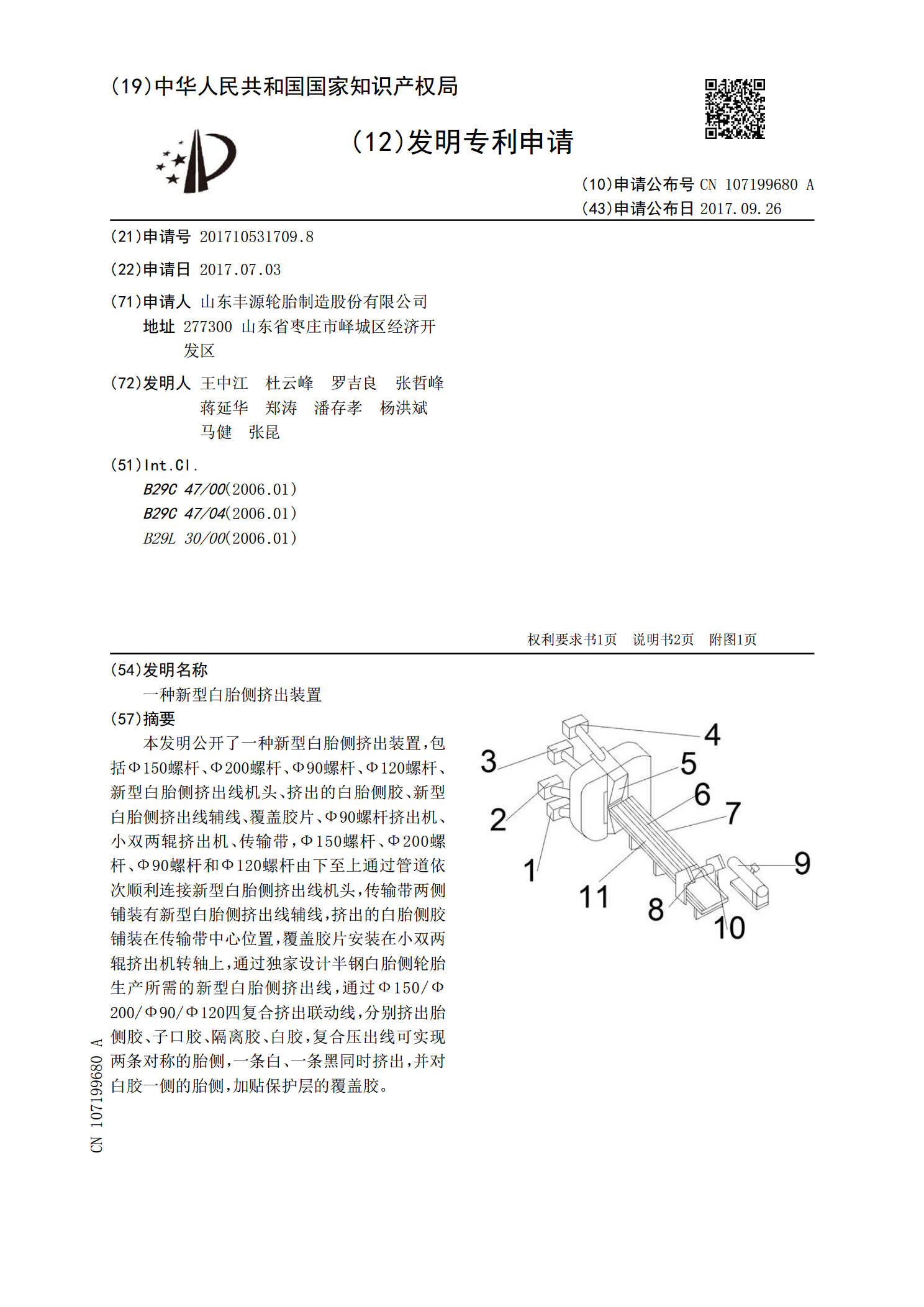
本发明公开了一种新型白胎侧挤出装置,包括Ф150螺杆、Ф200螺杆、Ф90螺杆、Ф120螺杆、新型白胎侧挤出线机头、挤出的白胎侧胶、新型白胎侧挤出线辅线、覆盖胶片、Ф90螺杆挤出机、小双两辊挤出机、传输带,Ф150螺杆、Ф200螺杆、Ф90螺杆和Ф120螺杆由下至上通过管道依次顺利连接新型白胎侧挤出线机头,传输带两侧铺装有新型白胎侧挤出线辅线,挤出的白胎侧胶铺装在传输带中心位置,覆盖胶片安装在小双两辊挤出机转轴上,通过独家设计半钢白胎侧轮胎生产所需的新型白胎侧挤出线,通过Ф150/Ф200/Ф90/Ф12