
一种基于隐马尔科夫模型的步态去噪方法.pdf

一只****爱敏

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于隐马尔科夫模型的步态去噪方法.pdf
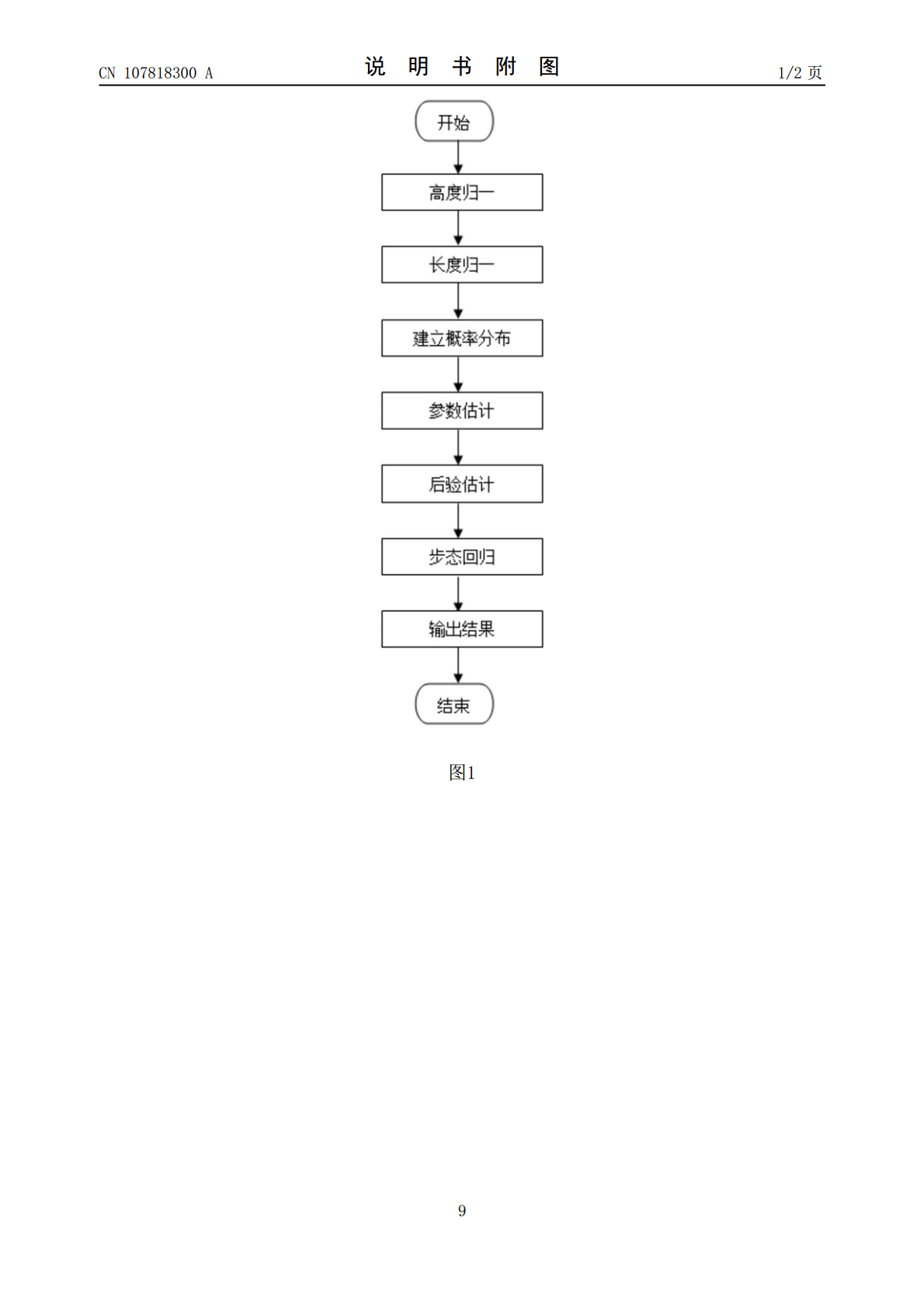
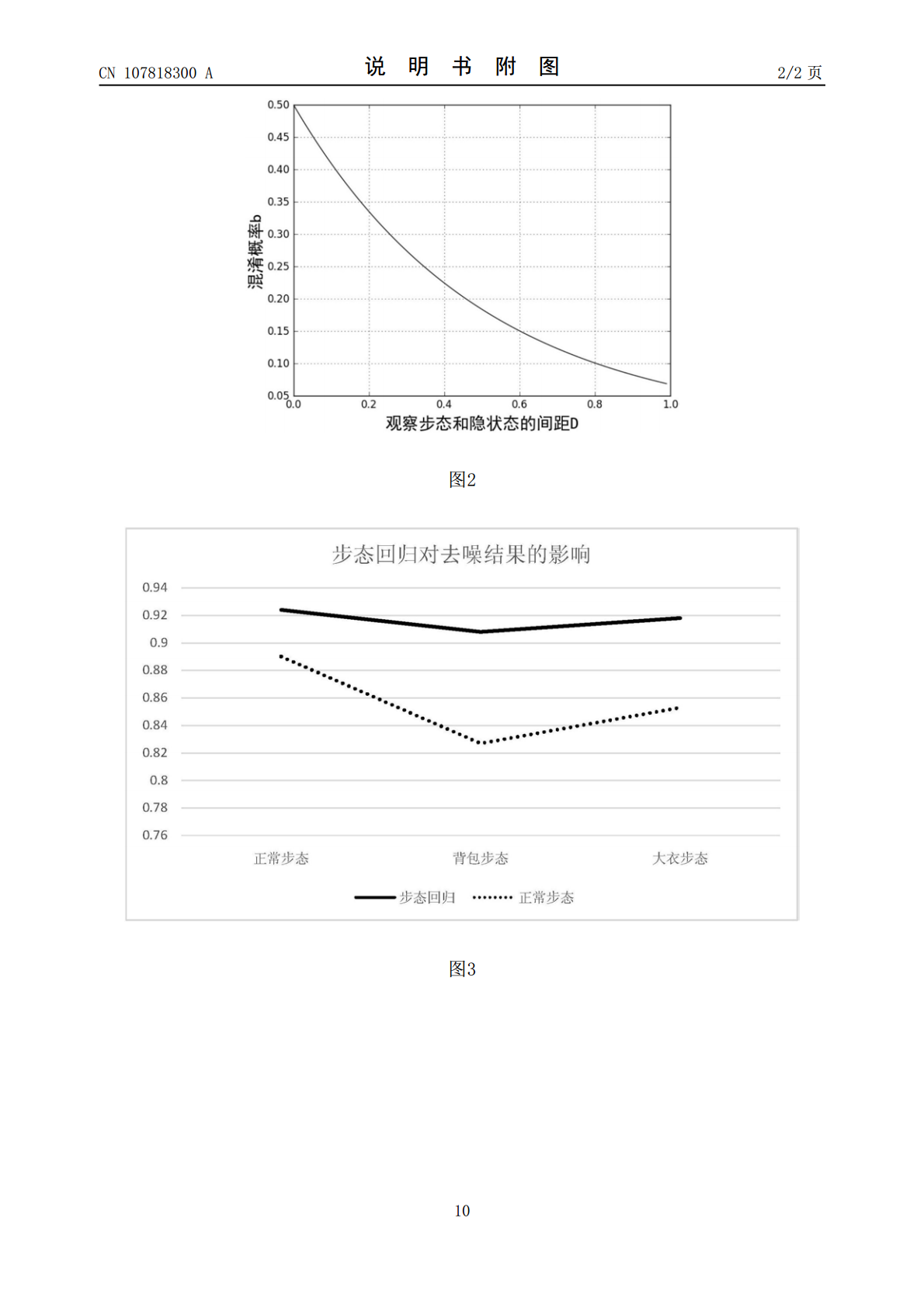
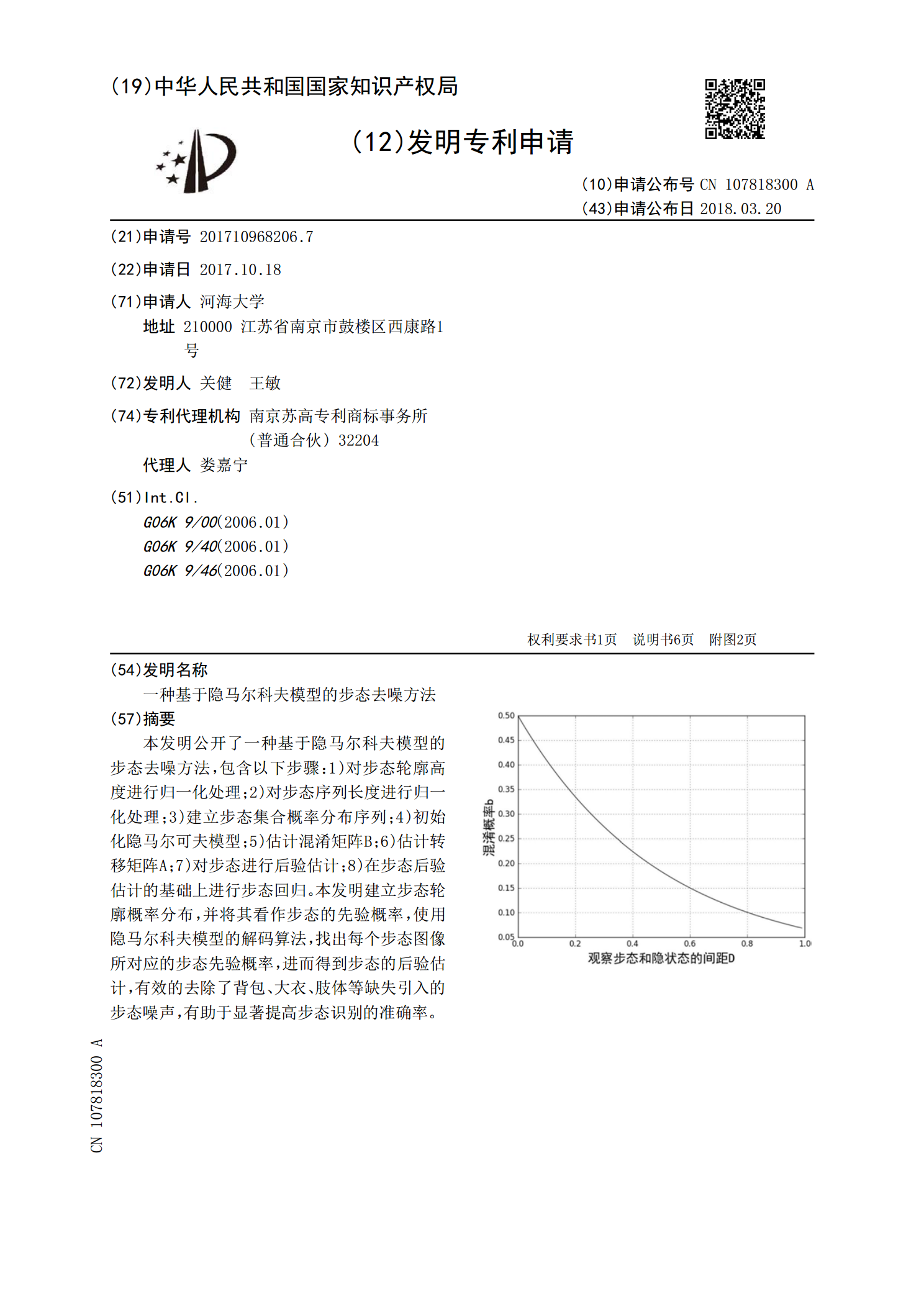
本发明公开了一种基于隐马尔科夫模型的步态去噪方法,包含以下步骤:1)对步态轮廓高度进行归一化处理;2)对步态序列长度进行归一化处理;3)建立步态集合概率分布序列;4)初始化隐马尔可夫模型;5)估计混淆矩阵B;6)估计转移矩阵A;7)对步态进行后验估计;8)在步态后验估计的基础上进行步态回归。本发明建立步态轮廓概率分布,并将其看作步态的先验概率,使用隐马尔科夫模型的解码算法,找出每个步态图像所对应的步态先验概率,进而得到步态的后验估计,有效的去除了背包、大衣、肢体等缺失引入的步态噪声,有助于显著提高步态识别

基于隐马尔科夫模型的步态身份识别的任务书.docx
基于隐马尔科夫模型的步态身份识别的任务书一、任务背景步态身份识别是指通过对个人步态特征的分析和比较来进行身份辨识的技术。步态身份识别具有非接触、实时性强、隐私保护等优点,并在安防、智能门禁、犯罪侦查等领域得到了广泛应用。在实际应用中,建立准确的步态身份识别模型对于确保识别精度和可靠性,提高系统稳定性和实用性至关重要。传统的步态身份识别方法主要有基于人体姿态的方法和基于步态特征的方法。前者需要获取身体骨架和关节角度的三维模型并进行比对,对环境有较高要求,适应性较差。后者则基于不同个体在步行时形成的独特的时间

基于轮廓波域块隐马尔可夫模型SAR图像去噪方法.pdf
本发明公开了一种基于轮廓波域块隐马尔可夫模型SAR图像去噪方法,它涉及图像处理领域,主要解决现有方法缺少空间适应性,细节信息丢失严重,边缘模糊的问题。其步骤为:(1)对数变换和Contourlet分解;(2)对Contourlet系数进行BlockHMM建模并训练;(3)利用估计参数对Contourlet系数进行校正;(4)对校正后的Contourlet数依次进行Contourlet逆变换和反对数变换,得到一次去噪图像;(5)对差值图像进行去噪,得到二次去噪图像;(6)对两次去噪图像进行融合,
一种基于隐半马尔科夫模型的上肢运动功能评分方法.pdf
本发明公开了一种基于隐半马尔科夫模型的上肢运动功能评分方法,包括步骤:(1)选取标准运动功能评估动作;(2)采集患者健侧上肢执行运动功能评估动作的上肢位姿与肌电数据集;(3)训练适用于运动功能评估的隐半马尔科夫模型;(4)利用(3)中的模型进行运动功能评估。本发明能够对脑卒中偏瘫患者的上肢运动功能恢复程度进行评估,在一定程度上取代康复治疗医师利用运动功能评估量表进行经验性评估的方法,从而降低康复治疗医师工作强度,辅助治疗医师工作,提高医师工作效率的目的。
隐马尔科夫模型HiddenMarkovmodel.ppt
目录HMM的由来马尔可夫性马尔科夫链转移概率矩阵转移概率矩阵(续)HMM实例HMM实例——描述HMM实例——约束HMM概念Markov链(,A)HMM的基本要素HMM可解决的问题解决问题1——基础方法解决问题1——前向法前向法示意图解决问题1——后向法Viterbi算法Viterbi算法(续)Baum-Welch算法(模型训练算法)Baum-Welch算法(续)Baum-Welch算法(续2)几种典型形状的马尔科夫链HMM的应用领域主要参考文献欢迎批评指正,谢谢!