
一种基于形状匹配的汽车零配件的质量检测方法.pdf

春景****23

1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于形状匹配的汽车零配件的质量检测方法.pdf
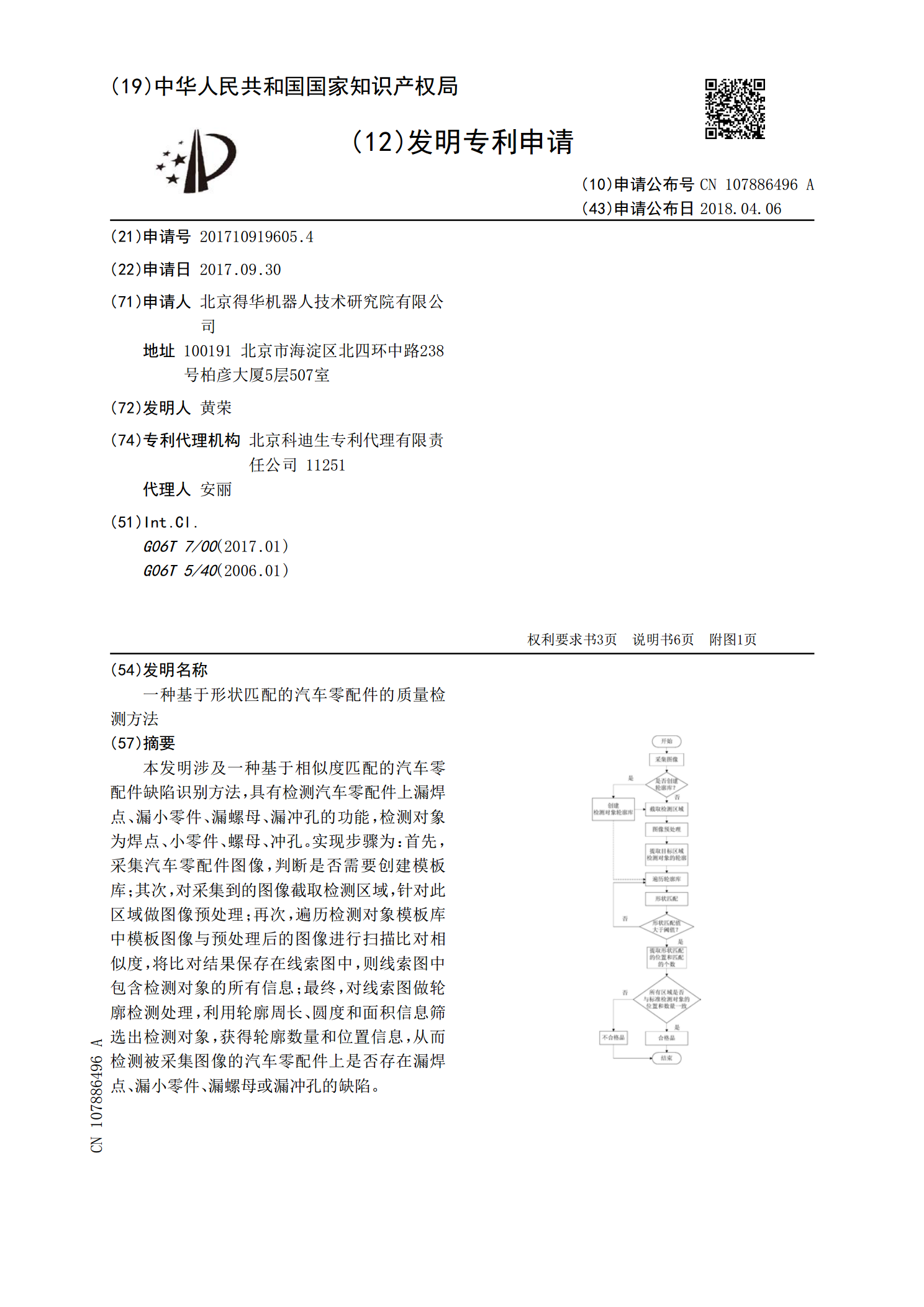
本发明涉及一种基于相似度匹配的汽车零配件缺陷识别方法,具有检测汽车零配件上漏焊点、漏小零件、漏螺母、漏冲孔的功能,检测对象为焊点、小零件、螺母、冲孔。实现步骤为:首先,采集汽车零配件图像,判断是否需要创建模板库;其次,对采集到的图像截取检测区域,针对此区域做图像预处理;再次,遍历检测对象模板库中模板图像与预处理后的图像进行扫描比对相似度,将比对结果保存在线索图中,则线索图中包含检测对象的所有信息;最终,对线索图做轮廓检测处理,利用轮廓周长、圆度和面积信息筛选出检测对象,获得轮廓数量和位置信息,从而检测被采
一种基于相似度匹配的汽车零配件缺陷识别方法.pdf
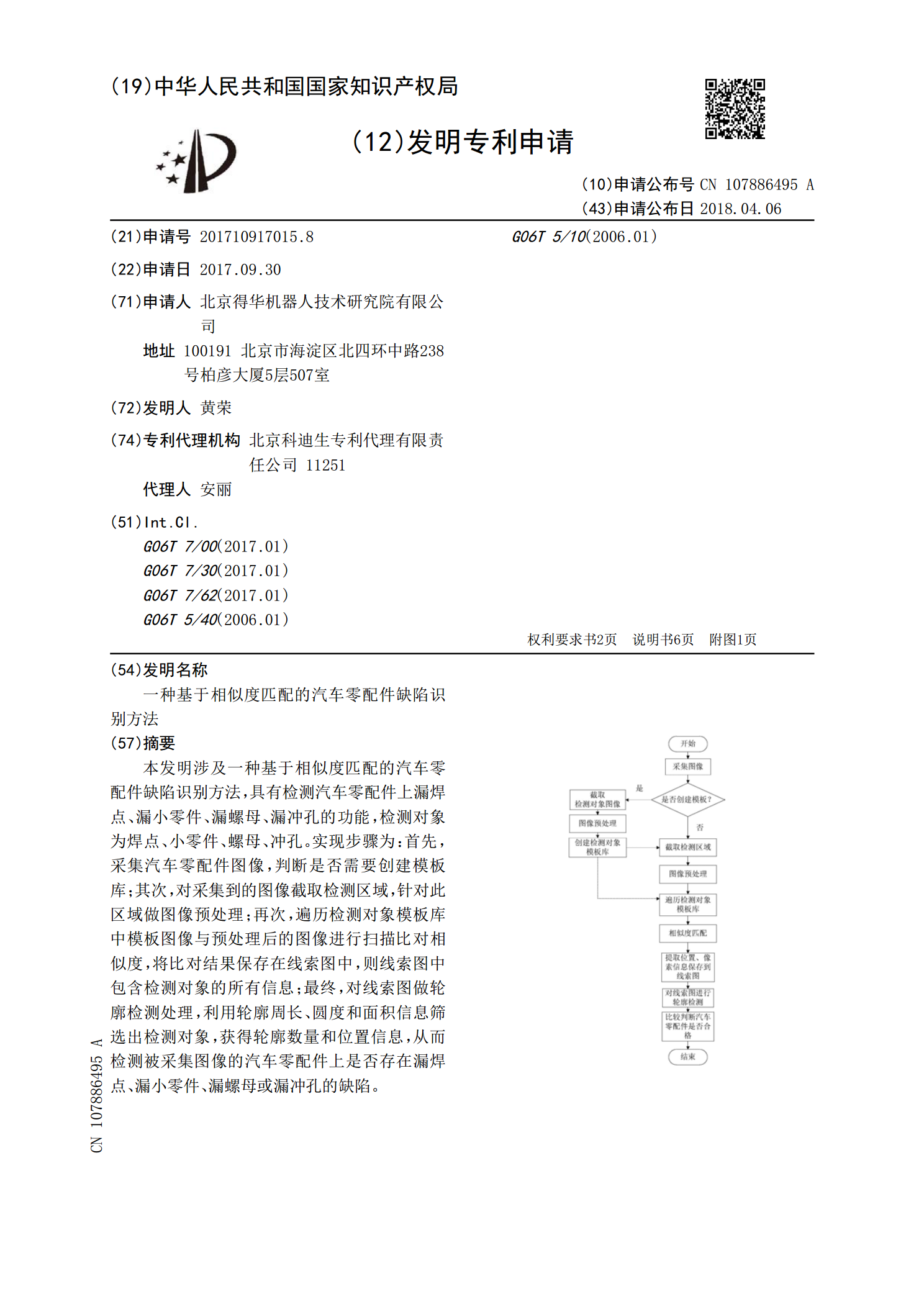
本发明涉及一种基于相似度匹配的汽车零配件缺陷识别方法,具有检测汽车零配件上漏焊点、漏小零件、漏螺母、漏冲孔的功能,检测对象为焊点、小零件、螺母、冲孔。实现步骤为:首先,采集汽车零配件图像,判断是否需要创建模板库;其次,对采集到的图像截取检测区域,针对此区域做图像预处理;再次,遍历检测对象模板库中模板图像与预处理后的图像进行扫描比对相似度,将比对结果保存在线索图中,则线索图中包含检测对象的所有信息;最终,对线索图做轮廓检测处理,利用轮廓周长、圆度和面积信息筛选出检测对象,获得轮廓数量和位置信息,从而检测被采

一种基于度量信息的形状匹配方法.pdf
本发明属于计算机视觉领域,涉及到一种基于度量信息的形状匹配方法。首先,将形状轮廓点的度量信息作为特征描述子,建立轮廓点与整体形状之间的约束关系;其次,为增强本发明对形状局部特征对微小变形的适应性,将度量信息进行分段平滑处理;最后,将这种基于度量的方法进行推广,用欧氏距离、三角形半径等度量方式生成特征描述符。该方法的特点是生成的形状特征描述符相对简单,仅仅需要简单的分段建模和数据计算,就能够对平面目标性状进行描述及匹配操作,运算时间大大减少,增加了其通用性。本发明的方法具有平移、旋转不变性,且计算简单,维度

一种基于混合描述子的形状匹配方法及系统.pdf
本申请提供了一种基于混合描述子的形状匹配方法,获取目标形状的边缘,得到所述目标形状的边界轮廓点;计算每个所述边界轮廓点的混合描述子;根据所述目标形状中所有边界轮廓点的混合描述子,计算所述目标形状与数据库中各个模板形状的匹配度值;根据各个所述匹配度值,确定与所述目标形状相匹配的模板形状。本发明计算每个边界轮廓点的混合描述子,并根据目标形状中所有边界轮廓点的混合描述子,计算所述目标形状与数据库中各个模板形状的匹配度值,可以对图像形状进行特征的提取和有效表示,具有尺度不变性、旋转不变性和平移不变性等优良性能,有
一种基于形状匹配的运动目标轨迹相似片段提取方法.pdf
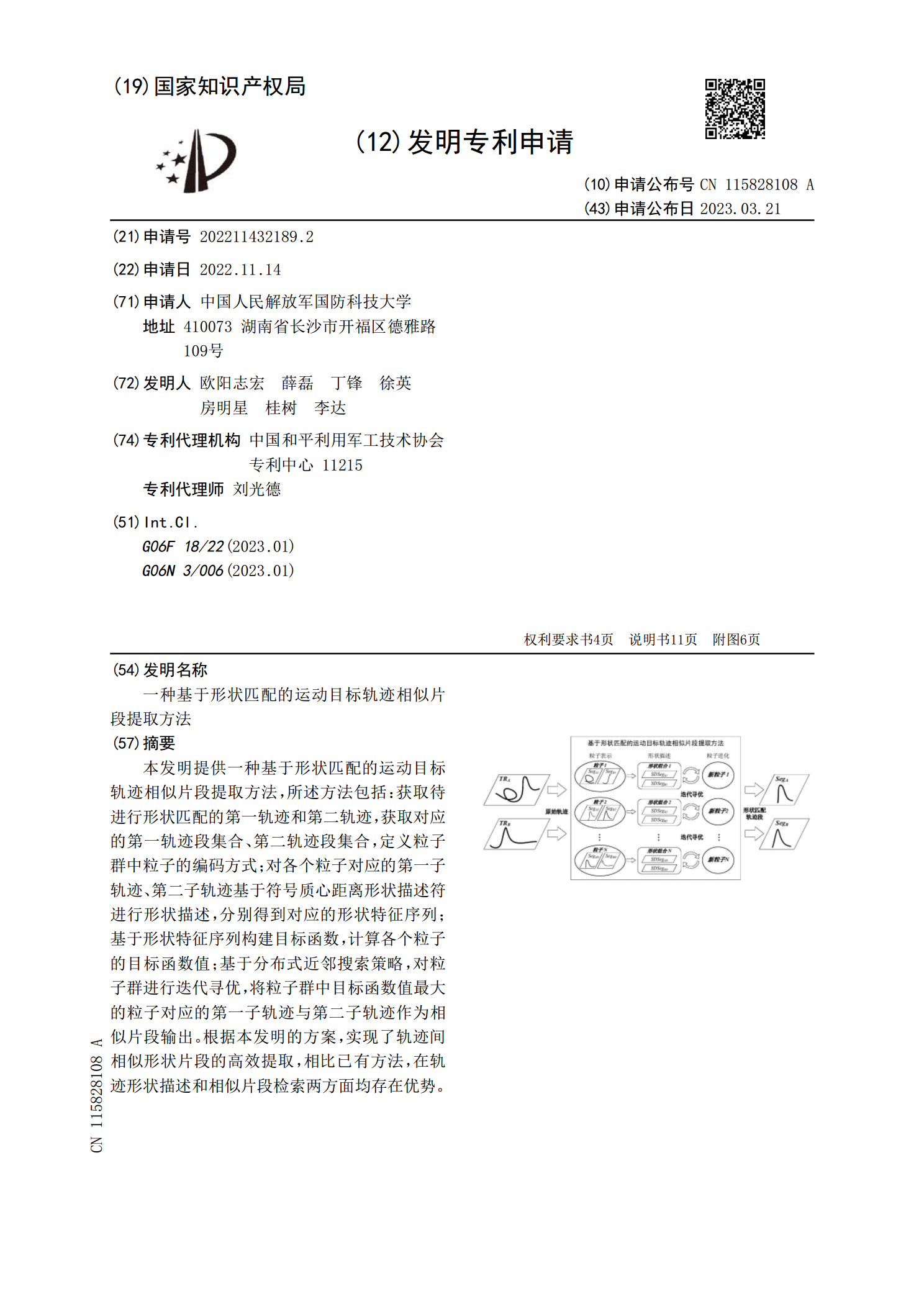
本发明提供一种基于形状匹配的运动目标轨迹相似片段提取方法,所述方法包括:获取待进行形状匹配的第一轨迹和第二轨迹,获取对应的第一轨迹段集合、第二轨迹段集合,定义粒子群中粒子的编码方式;对各个粒子对应的第一子轨迹、第二子轨迹基于符号质心距离形状描述符进行形状描述,分别得到对应的形状特征序列;基于形状特征序列构建目标函数,计算各个粒子的目标函数值;基于分布式近邻搜索策略,对粒子群进行迭代寻优,将粒子群中目标函数值最大的粒子对应的第一子轨迹与第二子轨迹作为相似片段输出。根据本发明的方案,实现了轨迹间相似形状片段的