
喷杆喷雾机用喷杆仿形智能控制系统及其控制方法.pdf

景福****90

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
喷杆喷雾机用喷杆仿形智能控制系统及其控制方法.pdf
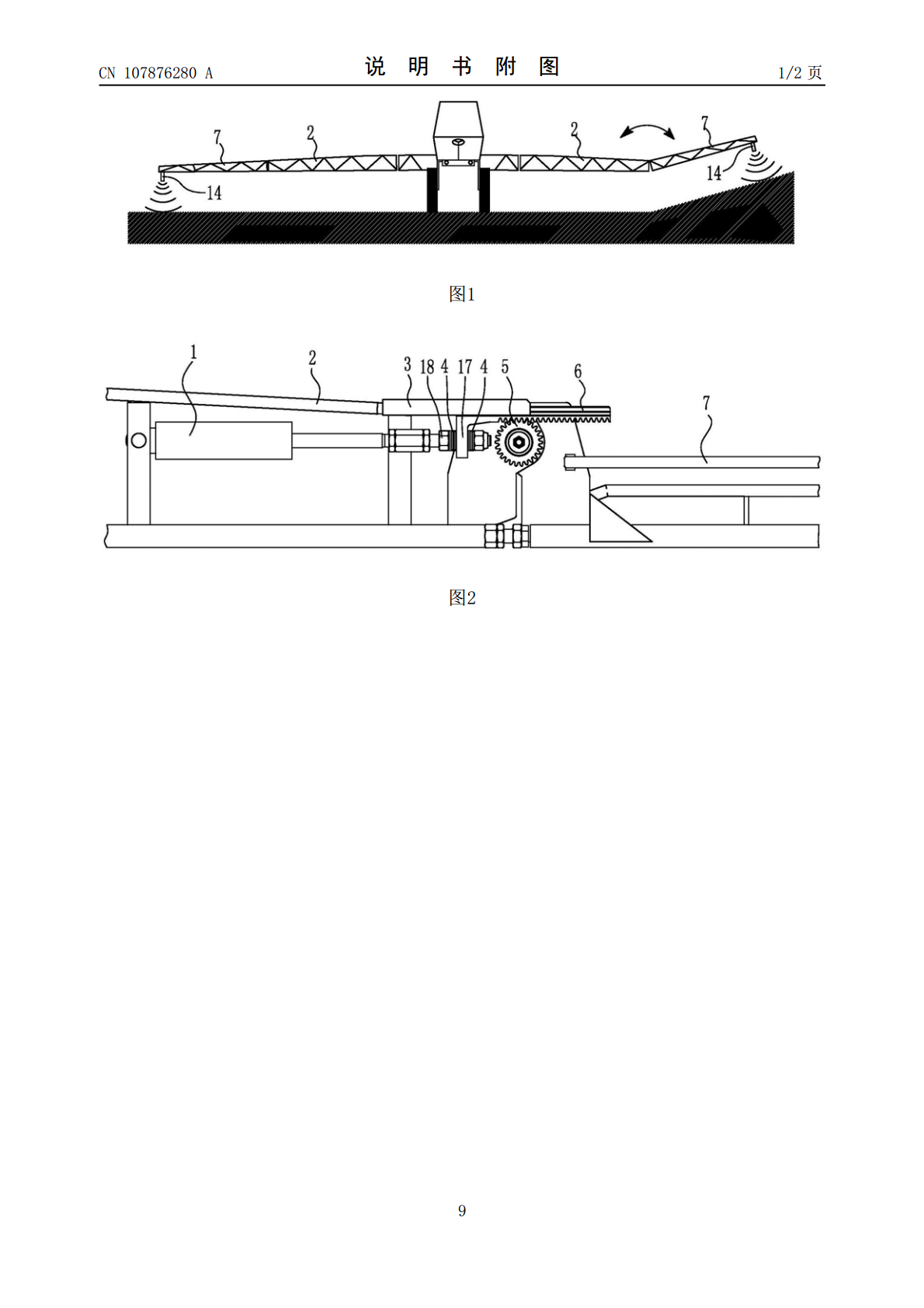
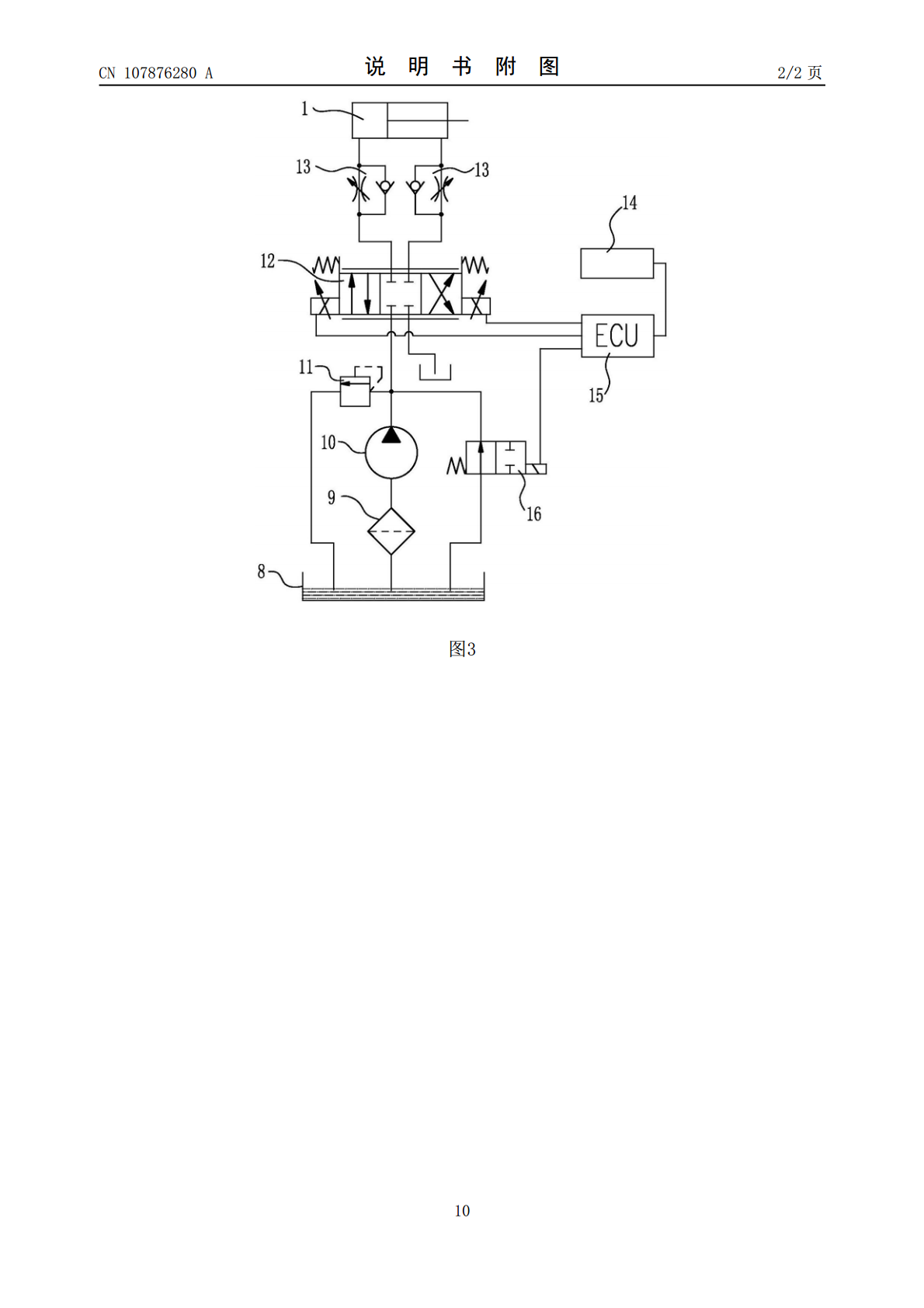
本发明公开了一种喷杆喷雾机用喷杆仿形智能控制系统及其控制方法。控制系统安装于喷杆内臂与喷杆外臂之间,喷杆内臂末端滑动安装有传动齿条,传动齿条与喷杆内臂之间设置有滑动导向机构和液压驱动机构;喷杆外臂始端固定安装有与传动齿条相啮合的传动齿轮;喷杆外臂末端固定安装有非接触式距离传感器,非接触式距离传感器的信号输出端连接有ECU控制器,ECU控制器通过液压控制系统控制连接液压驱动机构。本发明通过非接触式距离传感器实时、动态检测其与地面的距离,智能控制系统及时控制驱动油缸活塞杆的伸出或回缩量,保证喷杆外臂与地面的距
一种喷杆喷雾机喷杆装置.pdf
一种喷杆喷雾机喷杆装置,包括安装座、第二连接销和第一连接销,所述安装座的一侧焊接有第一喷杆和支杆,所述紧固板的表面安装有橡胶减震块,所述紧固板一侧的第一喷杆表面安装有安装架,所述第一喷杆的一侧通过第一连接销连接有第二喷杆,所述连接板一侧的第一连接销表面安装有油缸,所述第二喷杆的一侧通过第二连接销与第三喷杆连接,所述连接板的表面连接有钢丝绳,所述钢丝绳的另一端穿过安装架和油缸与第二连接销连接。本发明通过设置第一喷杆、第二喷杆、第三喷杆、安装座、第一连接销、第二连接销、紧固板、橡胶减震块结构,解决了喷杆结构复
一种喷杆喷雾机及其总线式控制系统.pdf
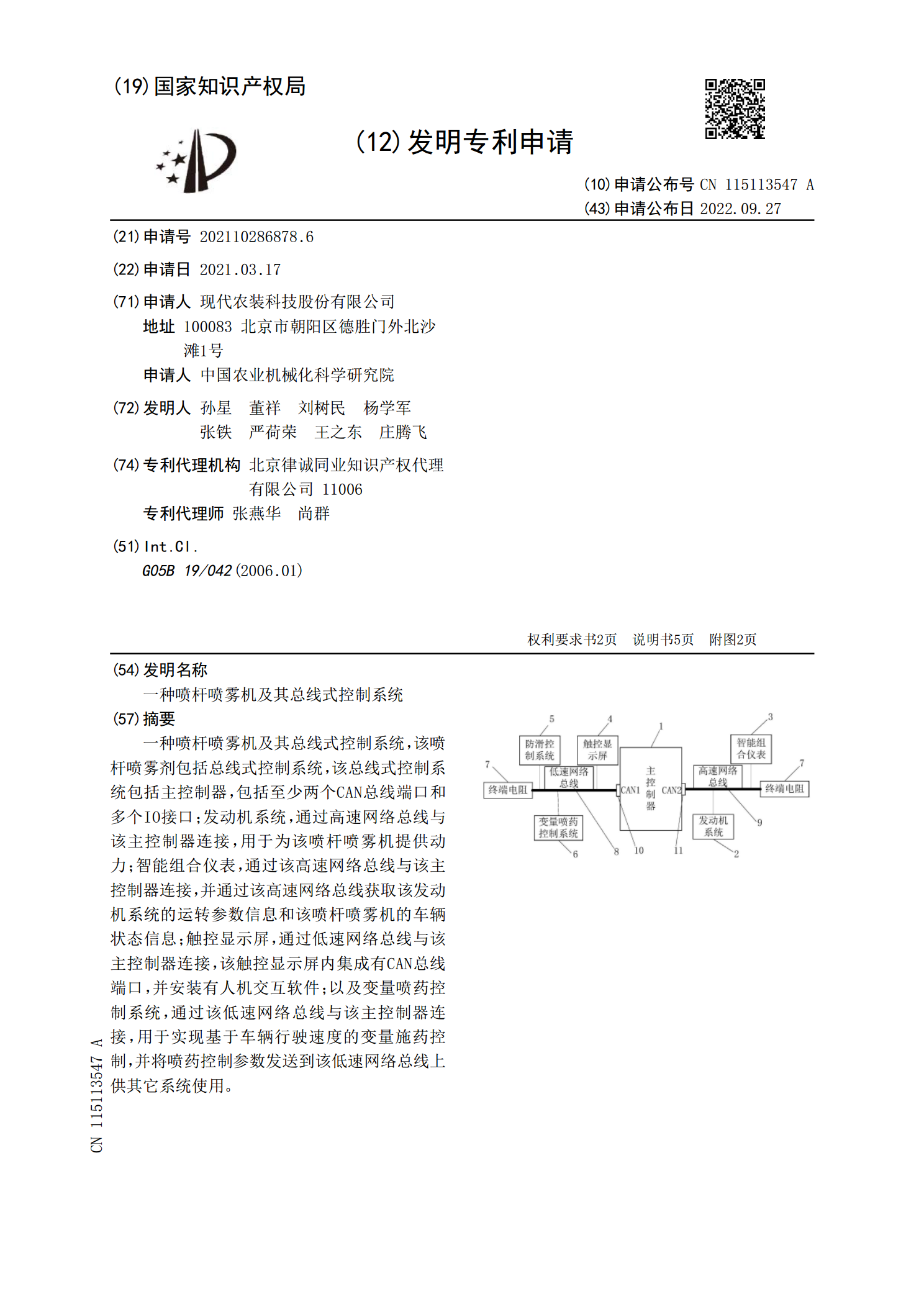
一种喷杆喷雾机及其总线式控制系统,该喷杆喷雾剂包括总线式控制系统,该总线式控制系统包括主控制器,包括至少两个CAN总线端口和多个IO接口;发动机系统,通过高速网络总线与该主控制器连接,用于为该喷杆喷雾机提供动力;智能组合仪表,通过该高速网络总线与该主控制器连接,并通过该高速网络总线获取该发动机系统的运转参数信息和该喷杆喷雾机的车辆状态信息;触控显示屏,通过低速网络总线与该主控制器连接,该触控显示屏内集成有CAN总线端口,并安装有人机交互软件;以及变量喷药控制系统,通过该低速网络总线与该主控制器连接,用于实
一种喷杆调节机构及其构成的跨行式喷杆喷雾机.pdf
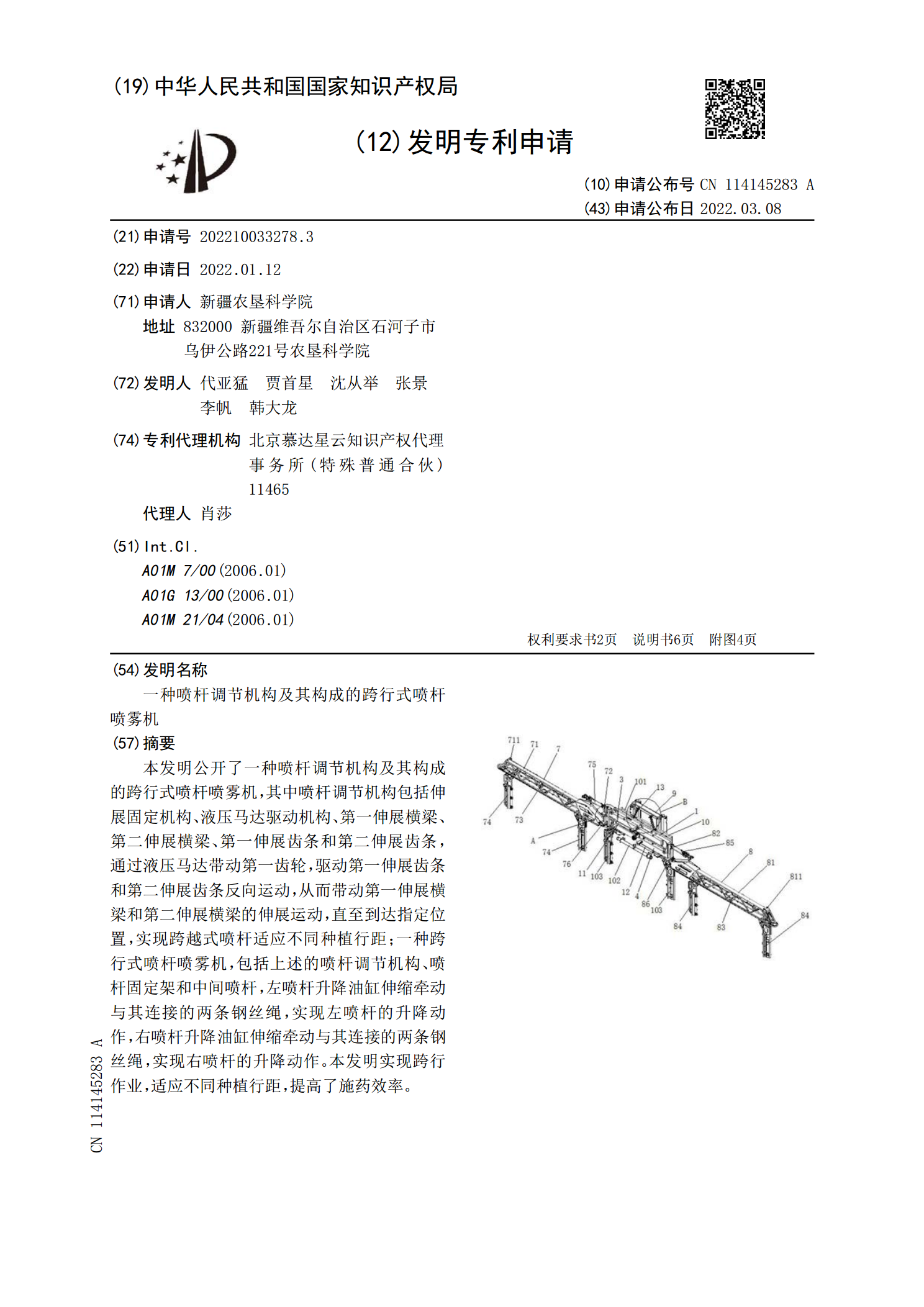
本发明公开了一种喷杆调节机构及其构成的跨行式喷杆喷雾机,其中喷杆调节机构包括伸展固定机构、液压马达驱动机构、第一伸展横梁、第二伸展横梁、第一伸展齿条和第二伸展齿条,通过液压马达带动第一齿轮,驱动第一伸展齿条和第二伸展齿条反向运动,从而带动第一伸展横梁和第二伸展横梁的伸展运动,直至到达指定位置,实现跨越式喷杆适应不同种植行距;一种跨行式喷杆喷雾机,包括上述的喷杆调节机构、喷杆固定架和中间喷杆,左喷杆升降油缸伸缩牵动与其连接的两条钢丝绳,实现左喷杆的升降动作,右喷杆升降油缸伸缩牵动与其连接的两条钢丝绳,实现右

自走式喷杆喷雾机的喷杆稳定自平衡装置.pdf
本发明公开了一种自走式喷杆喷雾机喷杆的稳定自平衡装置,其将喷雾机安装的左、右横向喷杆与动齿轮、滑轮、吊杆重锤及半圆弧形结构的固定滑轮槽结合在一起,形成一个横向喷杆自动平衡的系统;同时通过支点中心轴和横向喷杆支点中心轴套内安装的两组极性相反的强磁铁,使它们之间形成一个既可以独立转动又是相互吸引的活动组合。当机架本体受地面高低不平影响而颠簸晃动,横向喷杆在受影响开始摇摆会因三道吊杆重锤反作用力而将摇摆的横向喷杆向相反方向拉动,并且很快使横向喷杆趋于平衡;又由于磁铁相互吸引作用,有效消除了横向喷杆平衡修正过程中