
一种基于相似度匹配的汽车零配件缺陷识别方法.pdf

运升****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于相似度匹配的汽车零配件缺陷识别方法.pdf
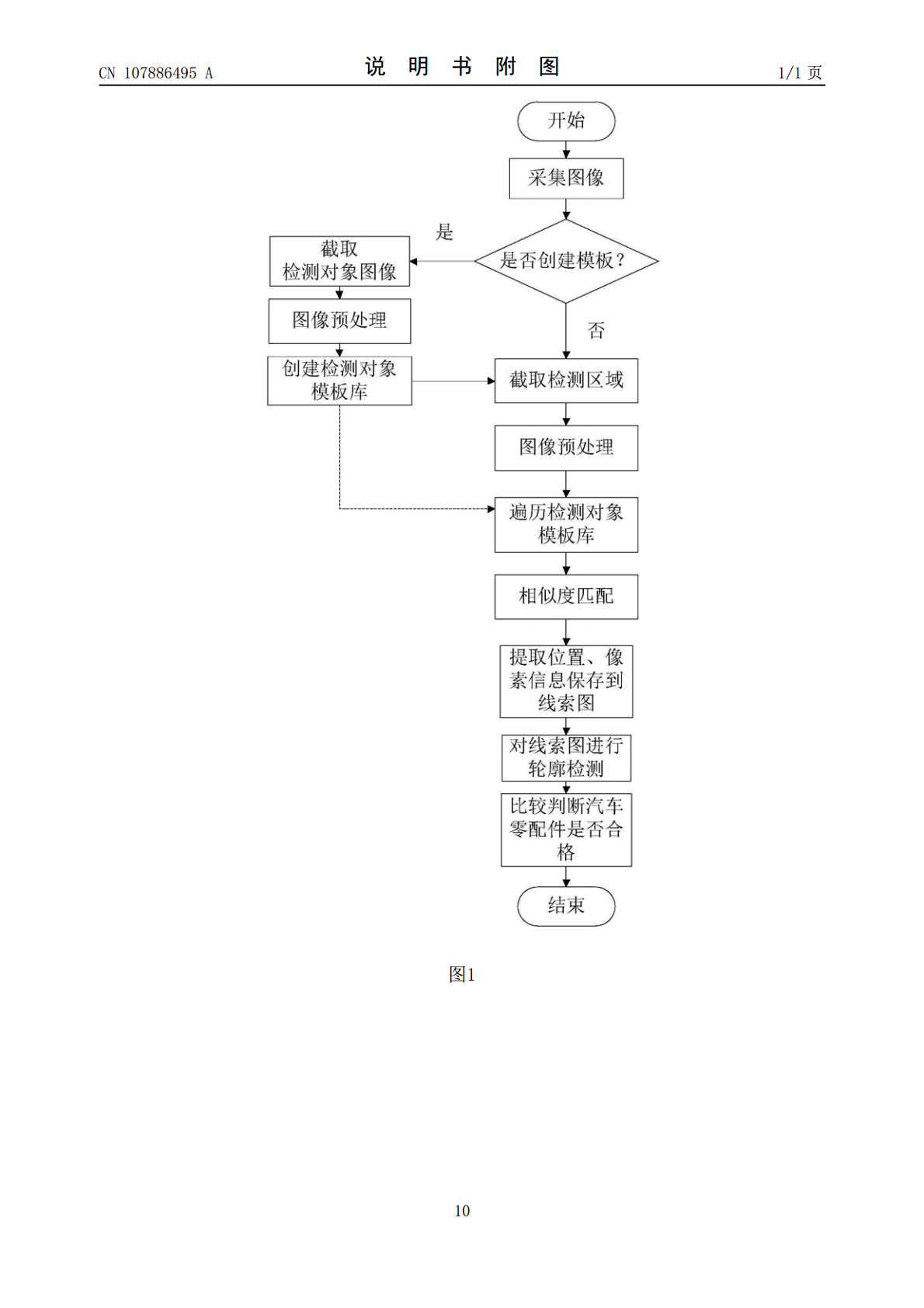
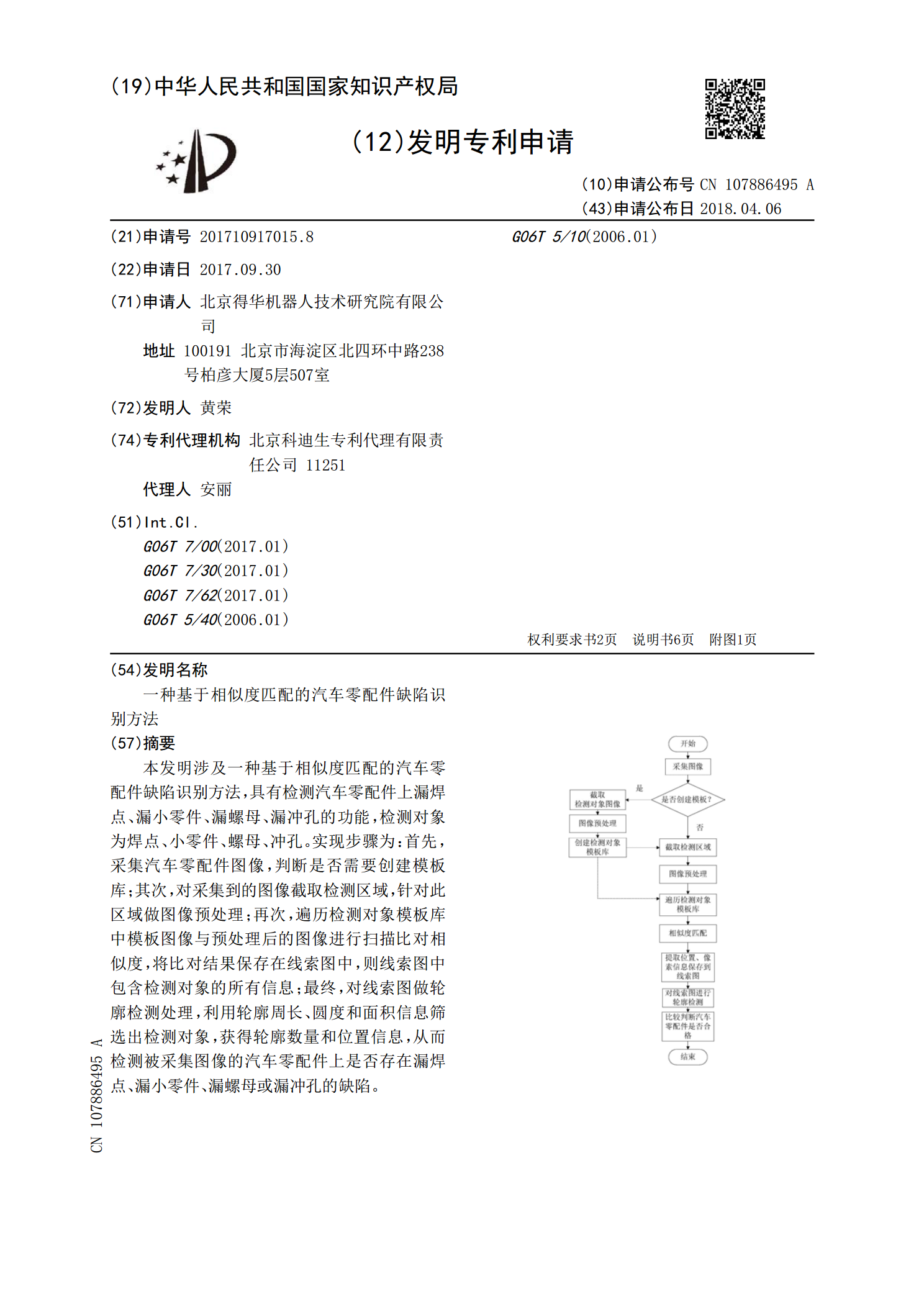
本发明涉及一种基于相似度匹配的汽车零配件缺陷识别方法,具有检测汽车零配件上漏焊点、漏小零件、漏螺母、漏冲孔的功能,检测对象为焊点、小零件、螺母、冲孔。实现步骤为:首先,采集汽车零配件图像,判断是否需要创建模板库;其次,对采集到的图像截取检测区域,针对此区域做图像预处理;再次,遍历检测对象模板库中模板图像与预处理后的图像进行扫描比对相似度,将比对结果保存在线索图中,则线索图中包含检测对象的所有信息;最终,对线索图做轮廓检测处理,利用轮廓周长、圆度和面积信息筛选出检测对象,获得轮廓数量和位置信息,从而检测被采
一种基于形状匹配的汽车零配件的质量检测方法.pdf
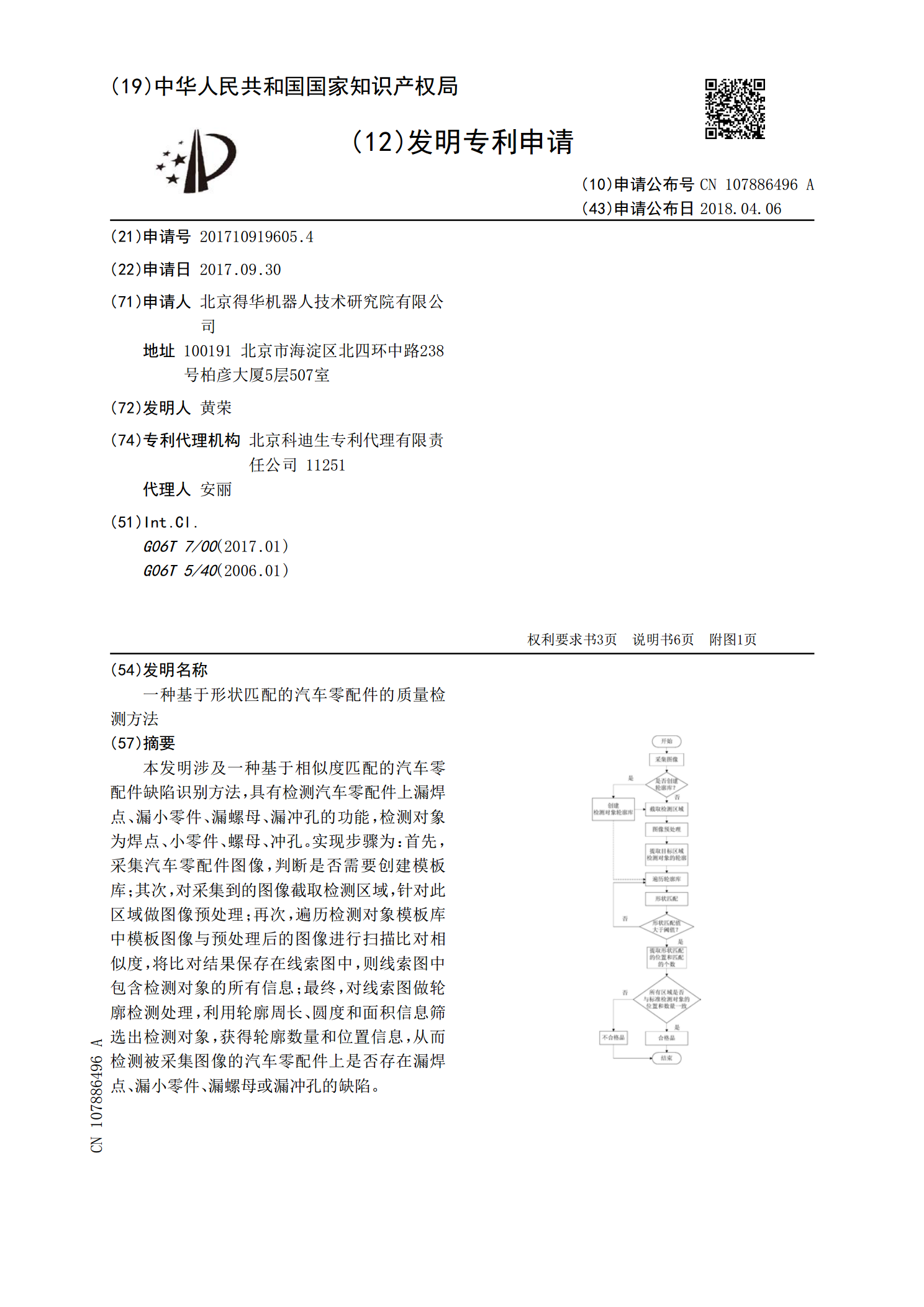
本发明涉及一种基于相似度匹配的汽车零配件缺陷识别方法,具有检测汽车零配件上漏焊点、漏小零件、漏螺母、漏冲孔的功能,检测对象为焊点、小零件、螺母、冲孔。实现步骤为:首先,采集汽车零配件图像,判断是否需要创建模板库;其次,对采集到的图像截取检测区域,针对此区域做图像预处理;再次,遍历检测对象模板库中模板图像与预处理后的图像进行扫描比对相似度,将比对结果保存在线索图中,则线索图中包含检测对象的所有信息;最终,对线索图做轮廓检测处理,利用轮廓周长、圆度和面积信息筛选出检测对象,获得轮廓数量和位置信息,从而检测被采
一种基于相似度的地址匹配方法及装置.pdf
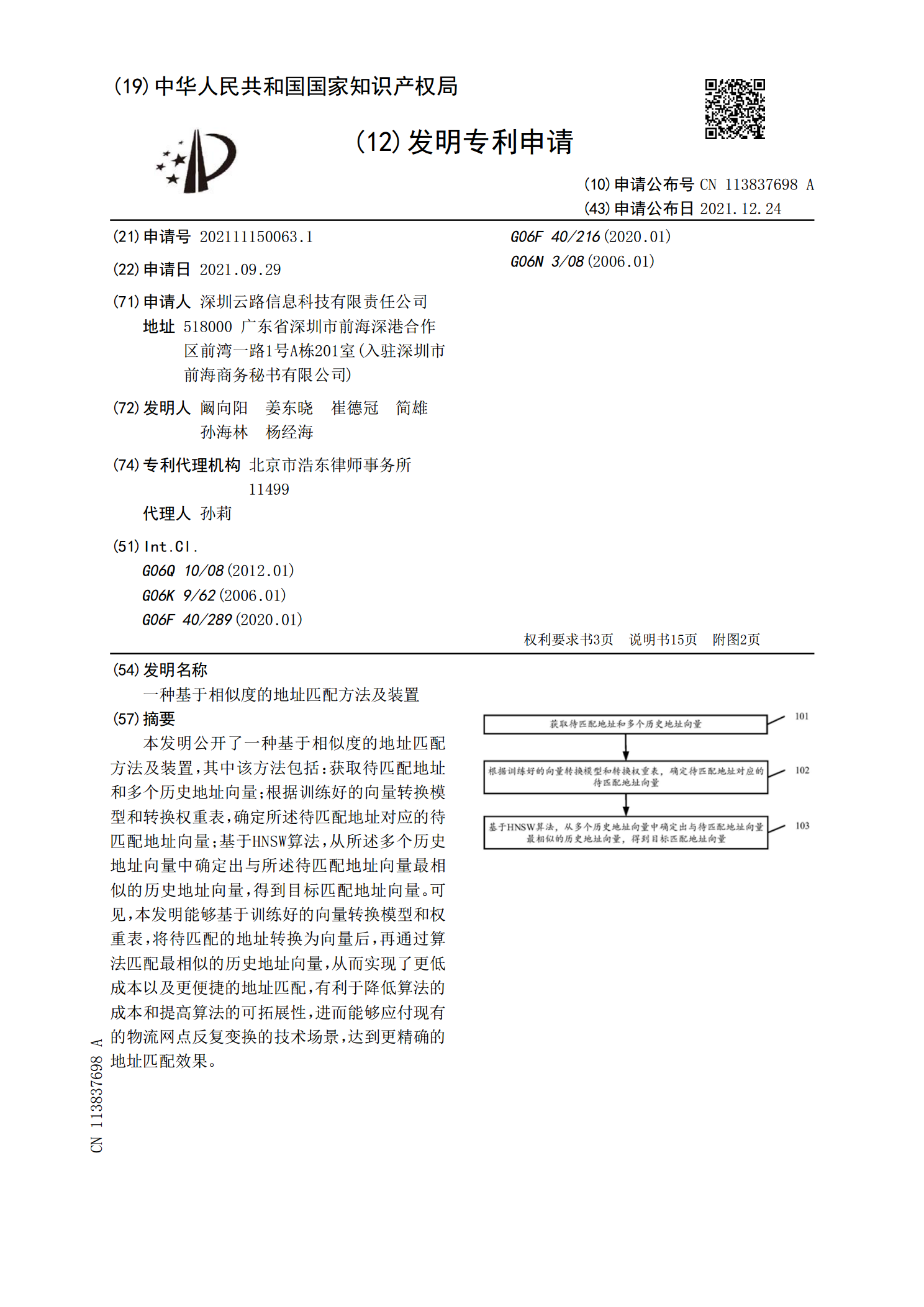
本发明公开了一种基于相似度的地址匹配方法及装置,其中该方法包括:获取待匹配地址和多个历史地址向量;根据训练好的向量转换模型和转换权重表,确定所述待匹配地址对应的待匹配地址向量;基于HNSW算法,从所述多个历史地址向量中确定出与所述待匹配地址向量最相似的历史地址向量,得到目标匹配地址向量。可见,本发明能够基于训练好的向量转换模型和权重表,将待匹配的地址转换为向量后,再通过算法匹配最相似的历史地址向量,从而实现了更低成本以及更便捷的地址匹配,有利于降低算法的成本和提高算法的可拓展性,进而能够应付现有的物流网点
一种基于目标相似度分布调整的癫痫状态识别方法.pdf
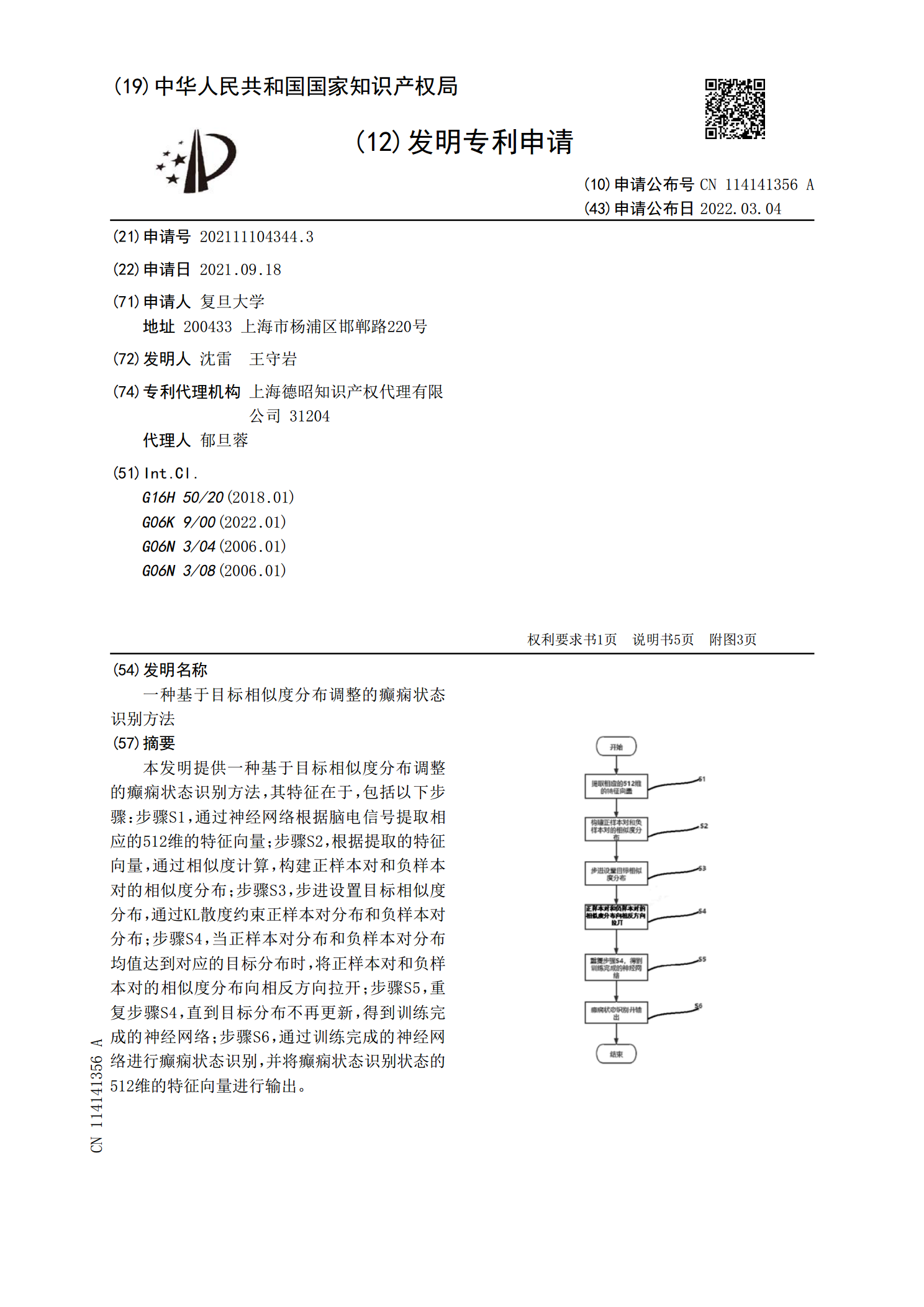
本发明提供一种基于目标相似度分布调整的癫痫状态识别方法,其特征在于,包括以下步骤:步骤S1,通过神经网络根据脑电信号提取相应的512维的特征向量;步骤S2,根据提取的特征向量,通过相似度计算,构建正样本对和负样本对的相似度分布;步骤S3,步进设置目标相似度分布,通过KL散度约束正样本对分布和负样本对分布;步骤S4,当正样本对分布和负样本对分布均值达到对应的目标分布时,将正样本对和负样本对的相似度分布向相反方向拉开;步骤S5,重复步骤S4,直到目标分布不再更新,得到训练完成的神经网络;步骤S6,通过训练完成

一种基于多字段相似度计算的患者身份匹配方法.pdf
本发明提供了一种基于多字段相似度计算的患者身份匹配方法,包括以下步骤:(1)设定用于确定相同患者的患者身份信息框架,该框架包括多个信息项;(2)将两患者记录的信息项的字段值转换为字段值字符串,并对字段值字符串作数据预处理;(3)逐一对经过步骤(2)处理后的两患者记录的同一信息项的字段值字符串进行相似度计算,得到各信息项相似度;(4)利用各信息项相似度进行计算,得到患者记录相似度;(5)将患者记录相似度与阈值比较,根据结果将患者记录归为同一患者、留待人工确认或是将患者记录归为不同患者。本发明提供的基于多字段