
一种涂装定位系统和方法.pdf

英瑞****写意


1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种涂装定位系统和方法.pdf
本发明揭示了一种涂装定位系统,对工件进行喷涂作业的喷枪固定在机械臂端部,所述机械臂固定在机器人基座平台,所述机器人基座平台上固定有线性模组,所述线性模组上固定有获取工件轮廓数据信息的二维激光雷达,所述线性模组驱动二维激光雷达沿工件运动。该方法采用市场已投入大量使用的二维激光雷达对大尺寸部件进行扫描,并结合三维点云模型配准算法,提出了一种较为便捷、简单有效的定位系统。同时,该方法也填补了国内对于复杂且尺寸非常大的部件的定位问题。
一种定位方法和系统.pdf
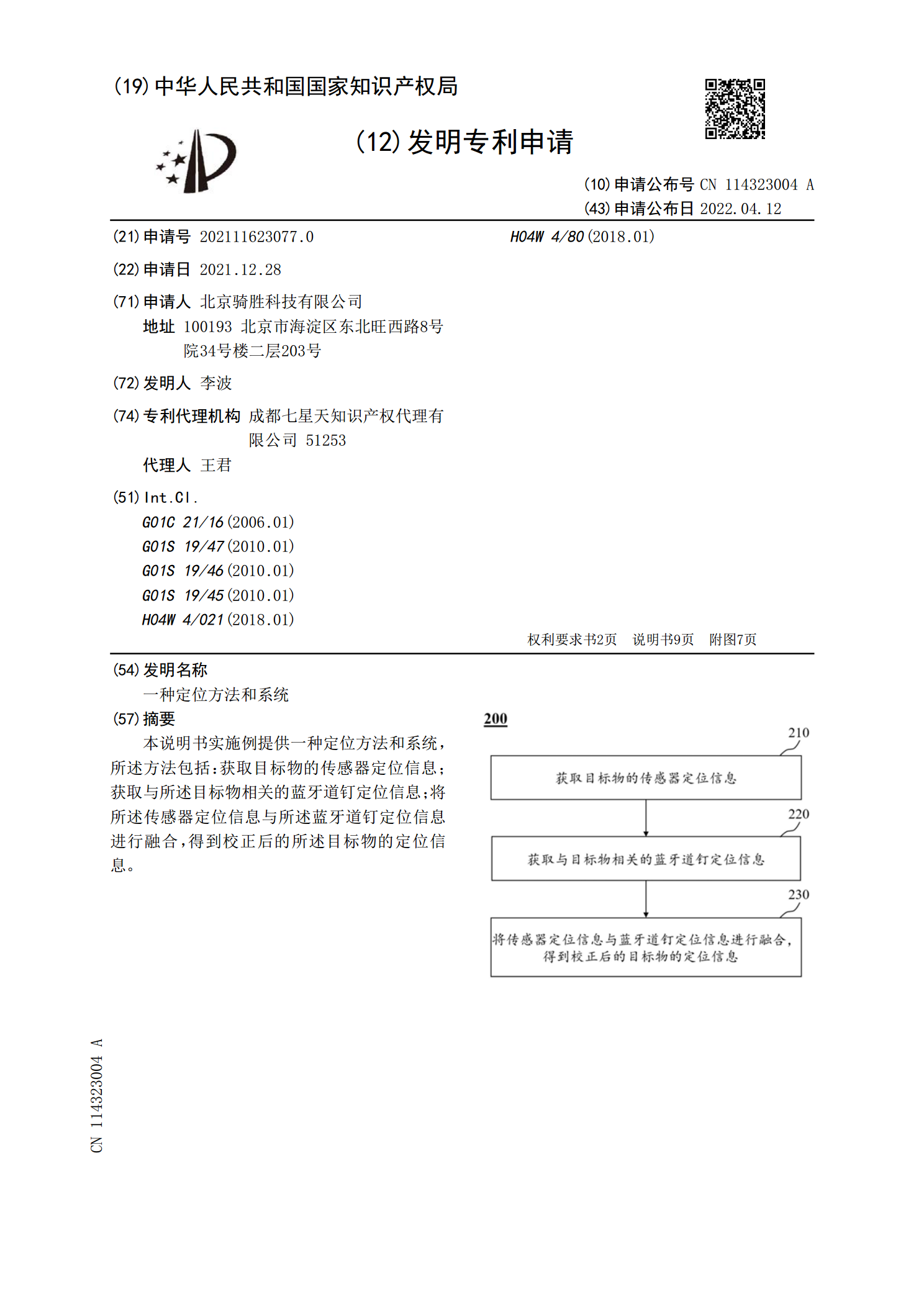
本说明书实施例提供一种定位方法和系统,所述方法包括:获取目标物的传感器定位信息;获取与所述目标物相关的蓝牙道钉定位信息;将所述传感器定位信息与所述蓝牙道钉定位信息进行融合,得到校正后的所述目标物的定位信息。
一种定位方法和通信系统.pdf
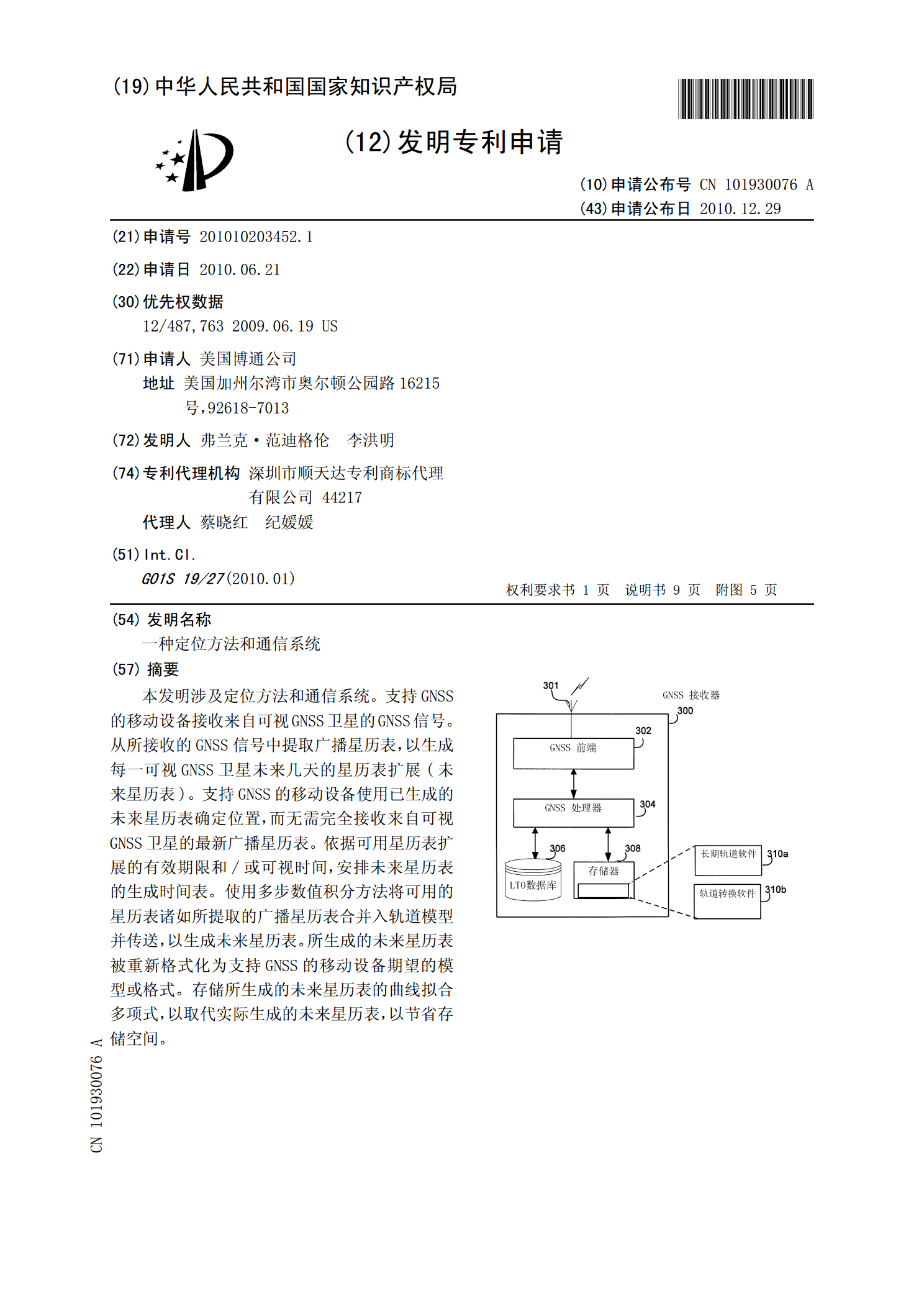
本发明涉及定位方法和通信系统。支持GNSS的移动设备接收来自可视GNSS卫星的GNSS信号。从所接收的GNSS信号中提取广播星历表,以生成每一可视GNSS卫星未来几天的星历表扩展(未来星历表)。支持GNSS的移动设备使用已生成的未来星历表确定位置,而无需完全接收来自可视GNSS卫星的最新广播星历表。依据可用星历表扩展的有效期限和/或可视时间,安排未来星历表的生成时间表。使用多步数值积分方法将可用的星历表诸如所提取的广播星历表合并入轨道模型并传送,以生成未来星历表。所生成的未来星历表被重新格式化为支持GNS
一种定位检测装置和方法及定位运料系统和定位运料方法.pdf
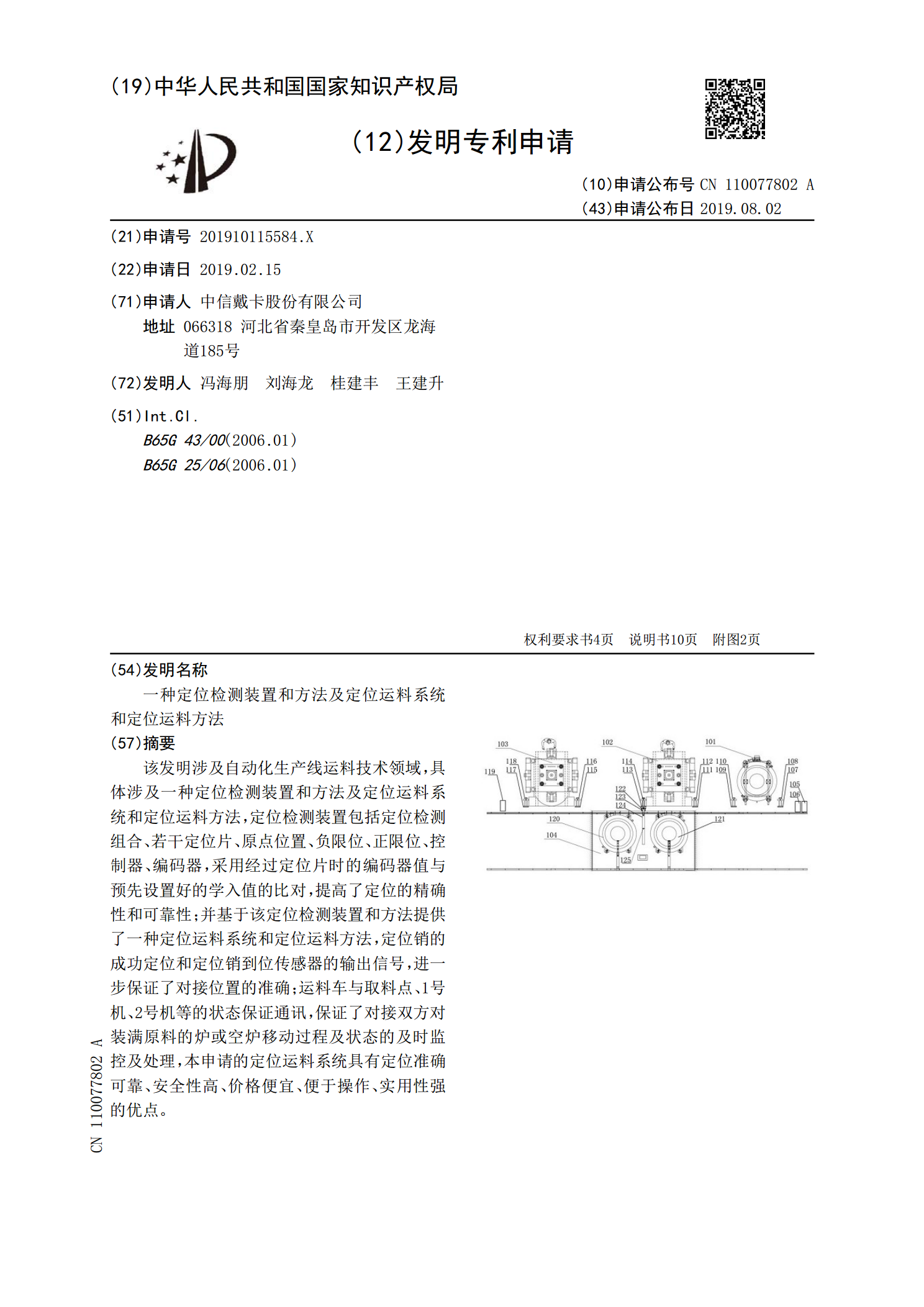
该发明涉及自动化生产线运料技术领域,具体涉及一种定位检测装置和方法及定位运料系统和定位运料方法,定位检测装置包括定位检测组合、若干定位片、原点位置、负限位、正限位、控制器、编码器,采用经过定位片时的编码器值与预先设置好的学入值的比对,提高了定位的精确性和可靠性;并基于该定位检测装置和方法提供了一种定位运料系统和定位运料方法,定位销的成功定位和定位销到位传感器的输出信号,进一步保证了对接位置的准确;运料车与取料点、1号机、2号机等的状态保证通讯,保证了对接双方对装满原料的炉或空炉移动过程及状态的及时监控及处
儿童定位系统和定位方法.pdf
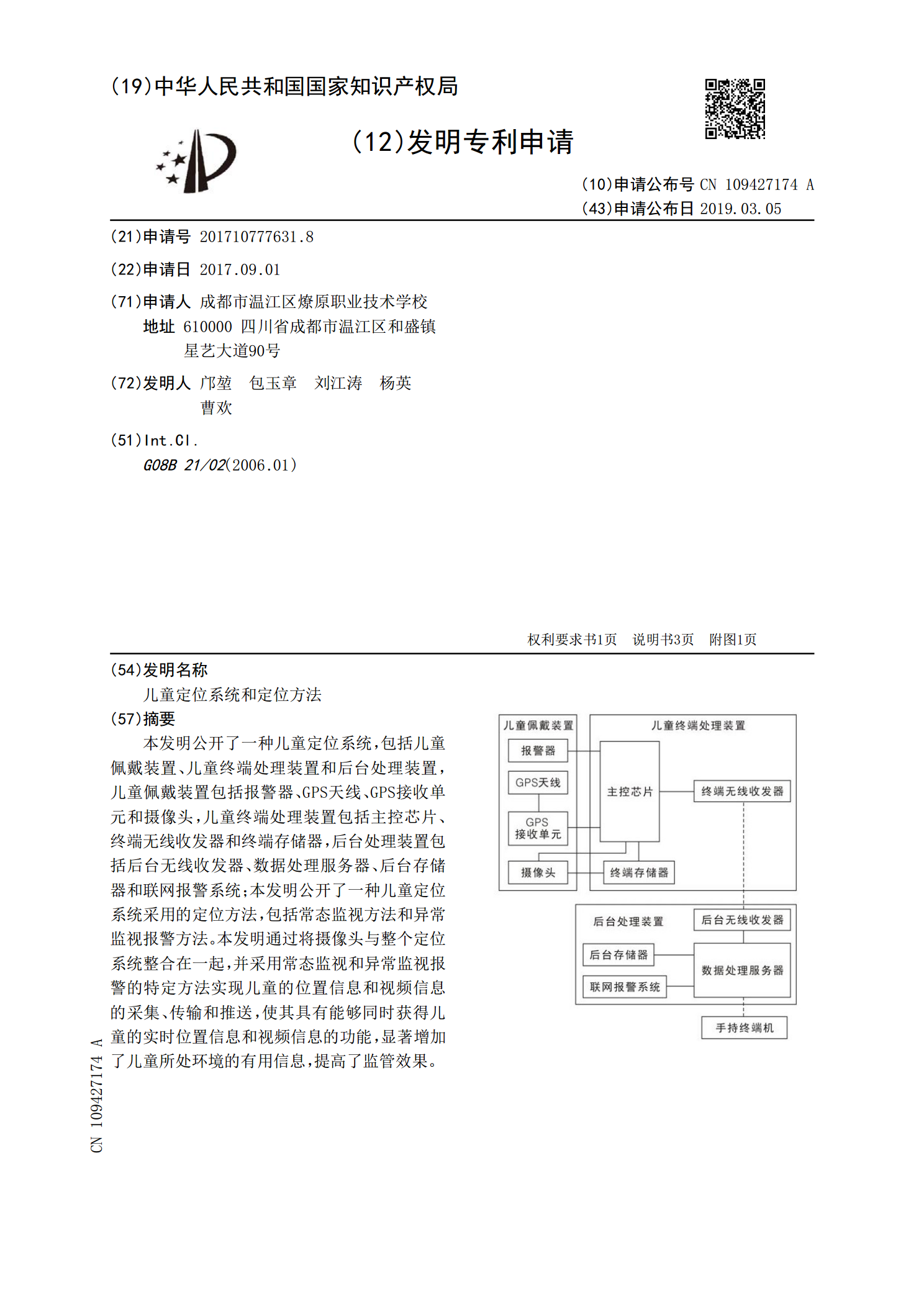
本发明公开了一种儿童定位系统,包括儿童佩戴装置、儿童终端处理装置和后台处理装置,儿童佩戴装置包括报警器、GPS天线、GPS接收单元和摄像头,儿童终端处理装置包括主控芯片、终端无线收发器和终端存储器,后台处理装置包括后台无线收发器、数据处理服务器、后台存储器和联网报警系统;本发明公开了一种儿童定位系统采用的定位方法,包括常态监视方法和异常监视报警方法。本发明通过将摄像头与整个定位系统整合在一起,并采用常态监视和异常监视报警的特定方法实现儿童的位置信息和视频信息的采集、传输和推送,使其具有能够同时获得儿童的实