
用于站台处泊靠操纵的辅助装置.pdf

一吃****仪凡

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于站台处泊靠操纵的辅助装置.pdf
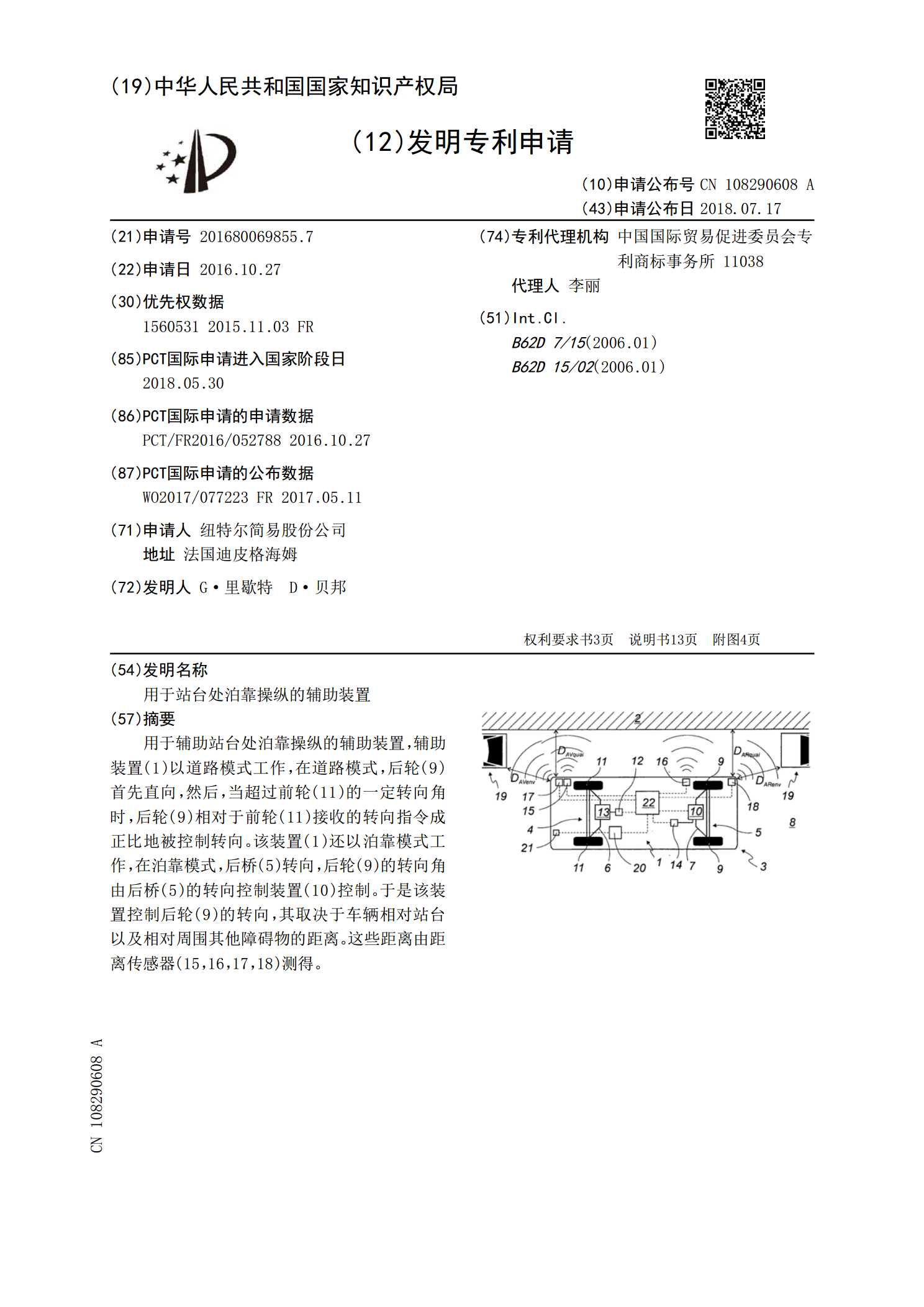
用于辅助站台处泊靠操纵的辅助装置,辅助装置(1)以道路模式工作,在道路模式,后轮(9)首先直向,然后,当超过前轮(11)的一定转向角时,后轮(9)相对于前轮(11)接收的转向指令成正比地被控制转向。该装置(1)还以泊靠模式工作,在泊靠模式,后桥(5)转向,后轮(9)的转向角由后桥(5)的转向控制装置(10)控制。于是该装置控制后轮(9)的转向,其取决于车辆相对站台以及相对周围其他障碍物的距离。这些距离由距离传感器(15,16,17,18)测得。
用于辅助至少一个软管的操纵的装置.pdf
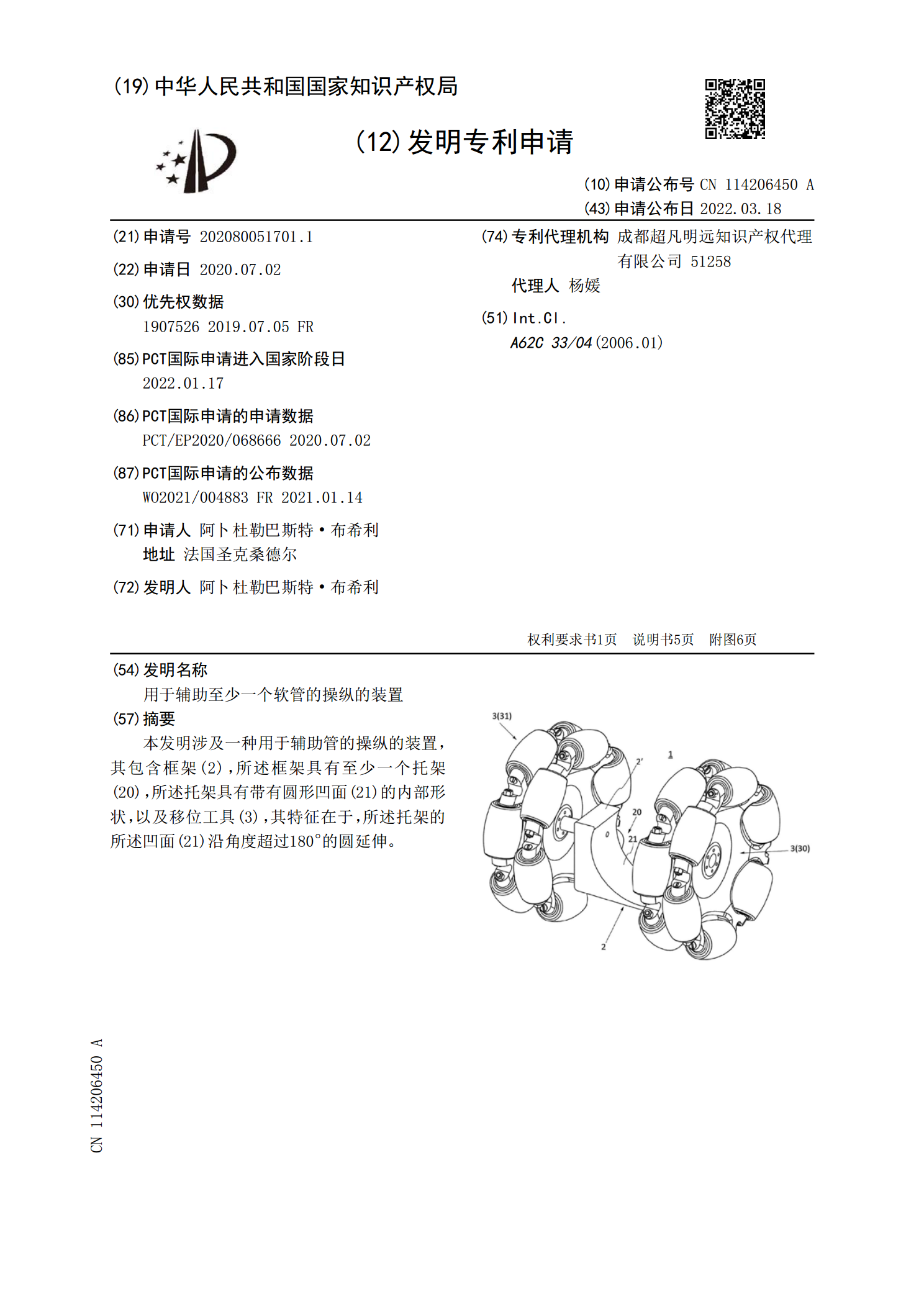
本发明涉及一种用于辅助管的操纵的装置,其包含框架(2),所述框架具有至少一个托架(20),所述托架具有带有圆形凹面(21)的内部形状,以及移位工具(3),其特征在于,所述托架的所述凹面(21)沿角度超过180°的圆延伸。
一种用于长期靠泊的系泊装置.pdf
一种用于长期靠泊的系泊装置,支撑架安装于码头上,码头上安装自由导缆滚轮,自由导缆滚轮上缠绕安装缆绳,缆绳上端通过上部横向的支撑架下侧安装的与码头上的自由导缆滚轮位置对应的自由导缆滚轮水平连接固定于横向支撑架下侧的弹簧,缆绳中部贯穿安装于固定于平台臂端部的惯性感应自锁链接接头,平台臂固定于平台上。本发明通过弹簧的弹性变形为被系泊平台提供各向回复力,将平台运动响应控制在一定范围,使平台在垂向内缓慢调整位置变化,能满足潮位变化需求;在极端情况下,通过惯性感应自锁链接接头,能安全快速对平台位置进行固定,保证了平台
船舶靠离泊操纵数学模型的研究.pdf
、
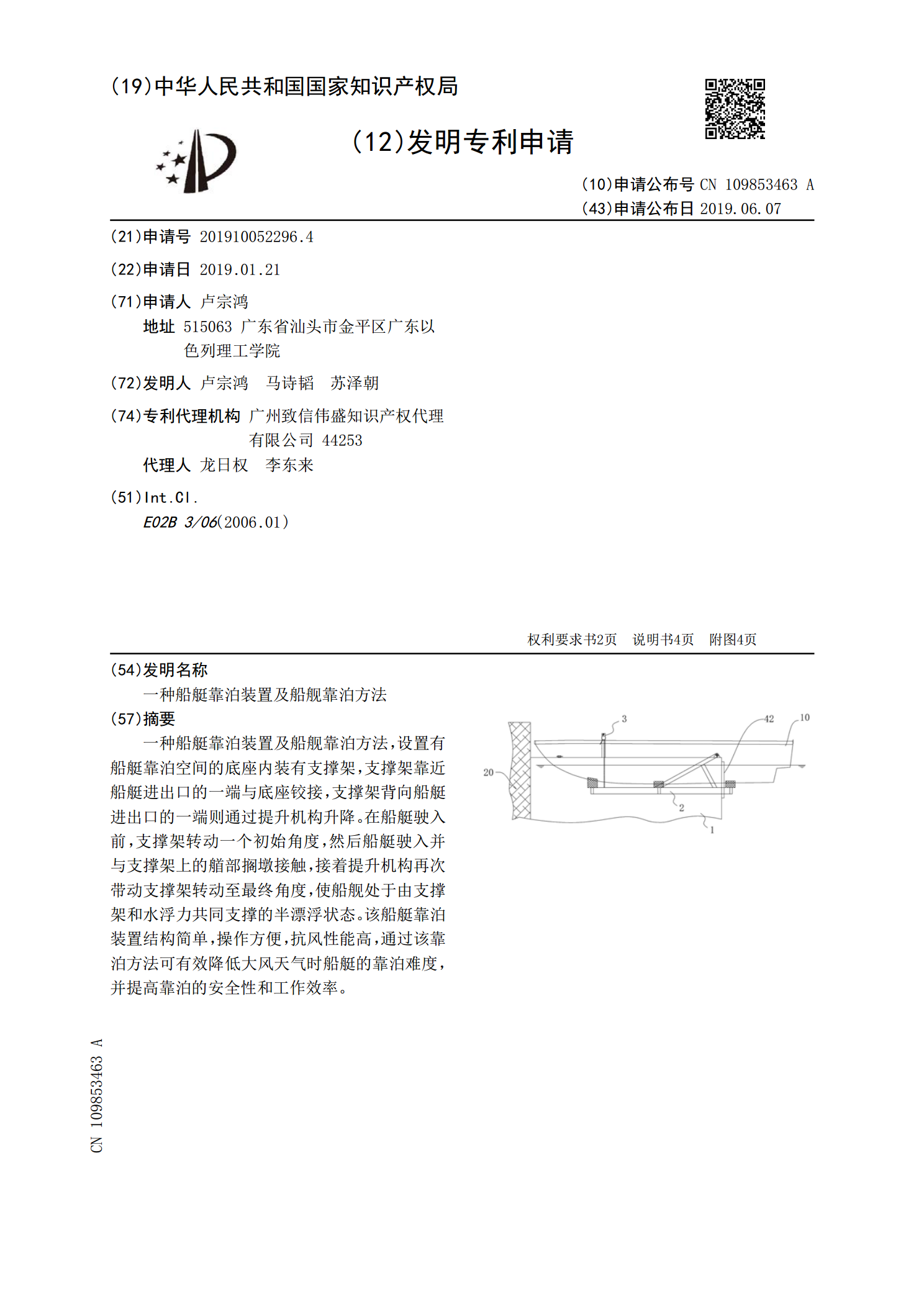
一种船艇靠泊装置及船舰靠泊方法.pdf
一种船艇靠泊装置及船舰靠泊方法,设置有船艇靠泊空间的底座内装有支撑架,支撑架靠近船艇进出口的一端与底座铰接,支撑架背向船艇进出口的一端则通过提升机构升降。在船艇驶入前,支撑架转动一个初始角度,然后船艇驶入并与支撑架上的艏部搁墩接触,接着提升机构再次带动支撑架转动至最终角度,使船舰处于由支撑架和水浮力共同支撑的半漂浮状态。该船艇靠泊装置结构简单,操作方便,抗风性能高,通过该靠泊方法可有效降低大风天气时船艇的靠泊难度,并提高靠泊的安全性和工作效率。