
一种全自动喂料清粪机.pdf

努力****妙风

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全自动喂料清粪机.pdf
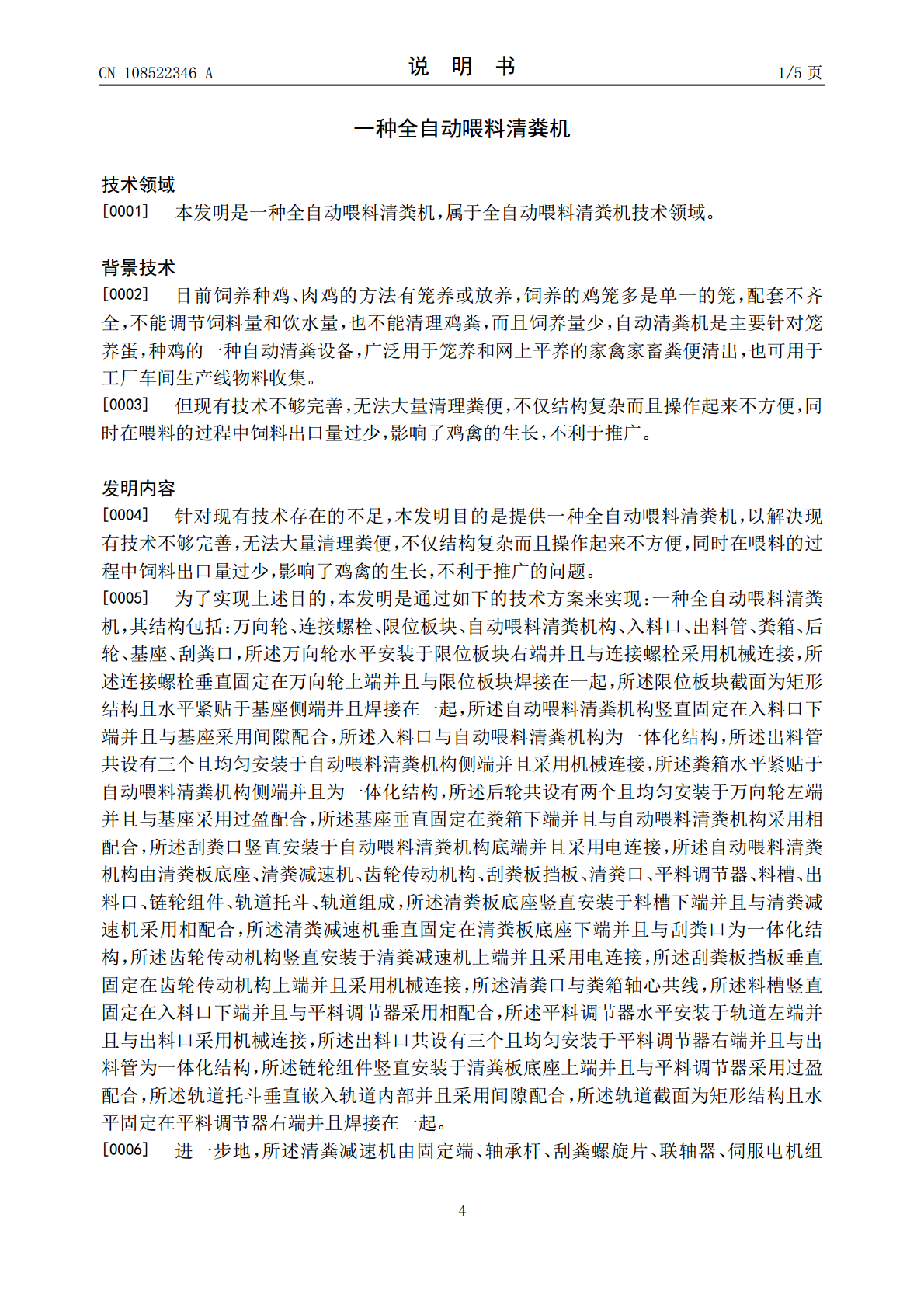
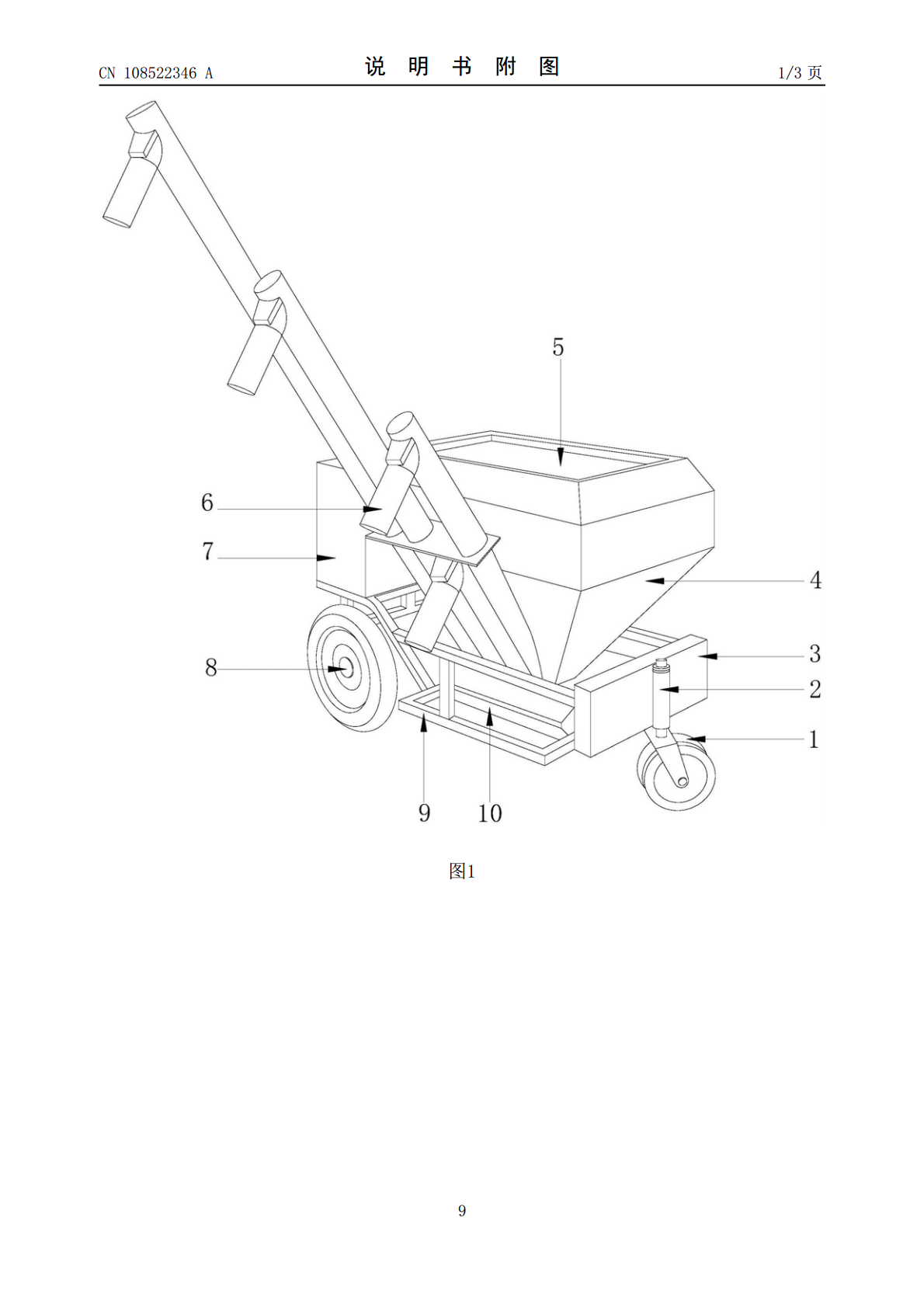
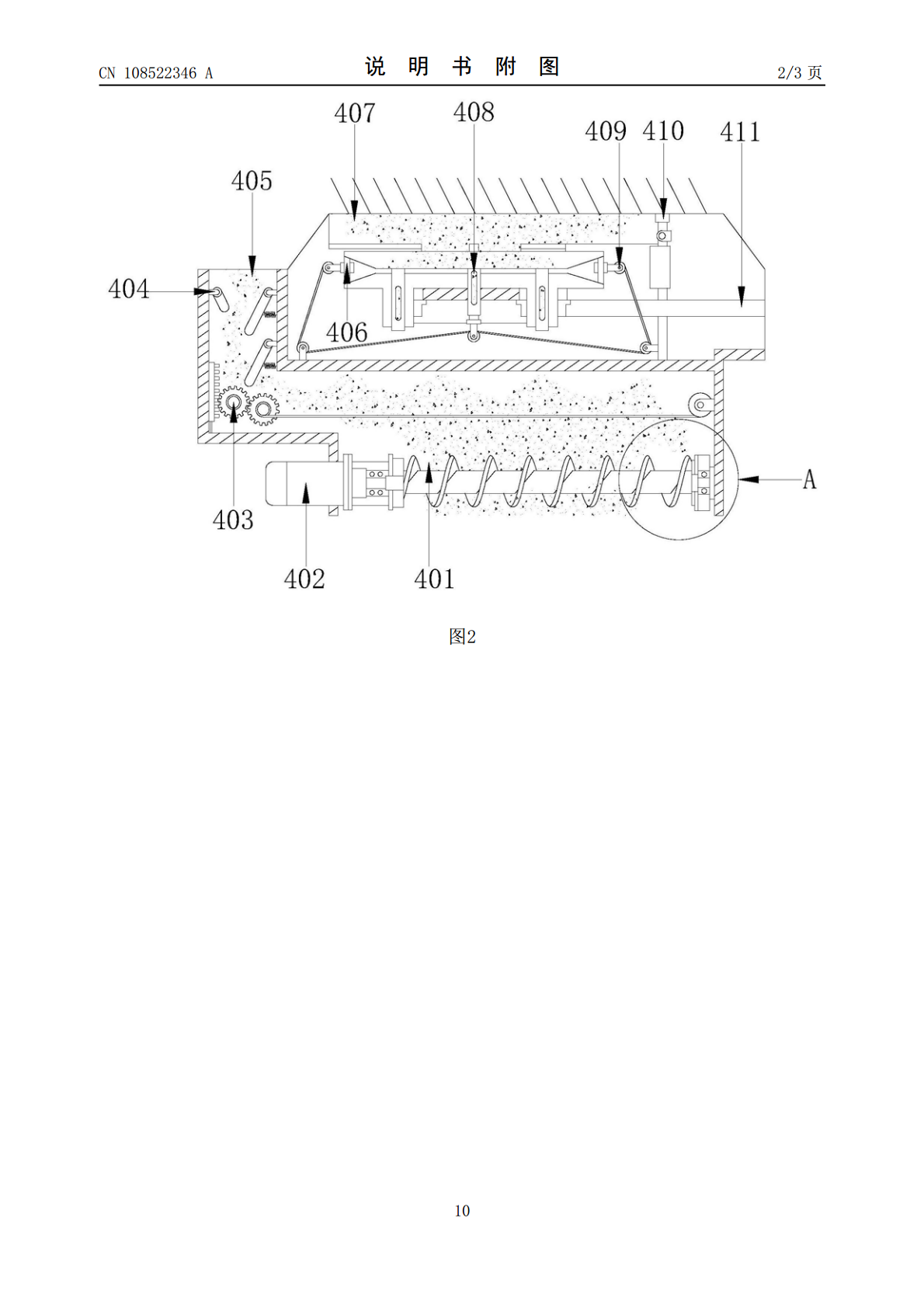
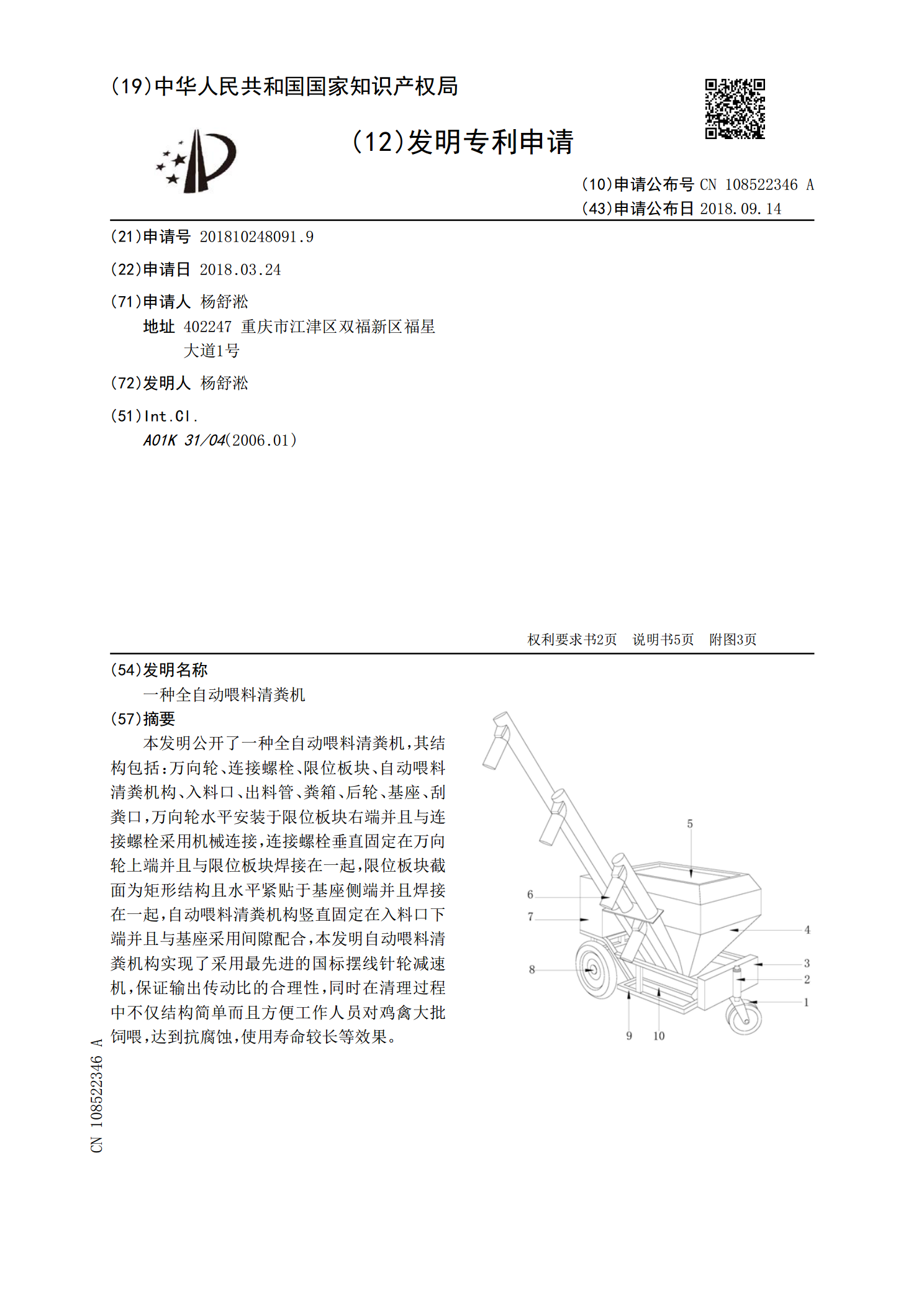
本发明公开了一种全自动喂料清粪机,其结构包括:万向轮、连接螺栓、限位板块、自动喂料清粪机构、入料口、出料管、粪箱、后轮、基座、刮粪口,万向轮水平安装于限位板块右端并且与连接螺栓采用机械连接,连接螺栓垂直固定在万向轮上端并且与限位板块焊接在一起,限位板块截面为矩形结构且水平紧贴于基座侧端并且焊接在一起,自动喂料清粪机构竖直固定在入料口下端并且与基座采用间隙配合,本发明自动喂料清粪机构实现了采用最先进的国标摆线针轮减速机,保证输出传动比的合理性,同时在清理过程中不仅结构简单而且方便工作人员对鸡禽大批饲喂,达到
一种新型的全自动喂料清粪机.pdf
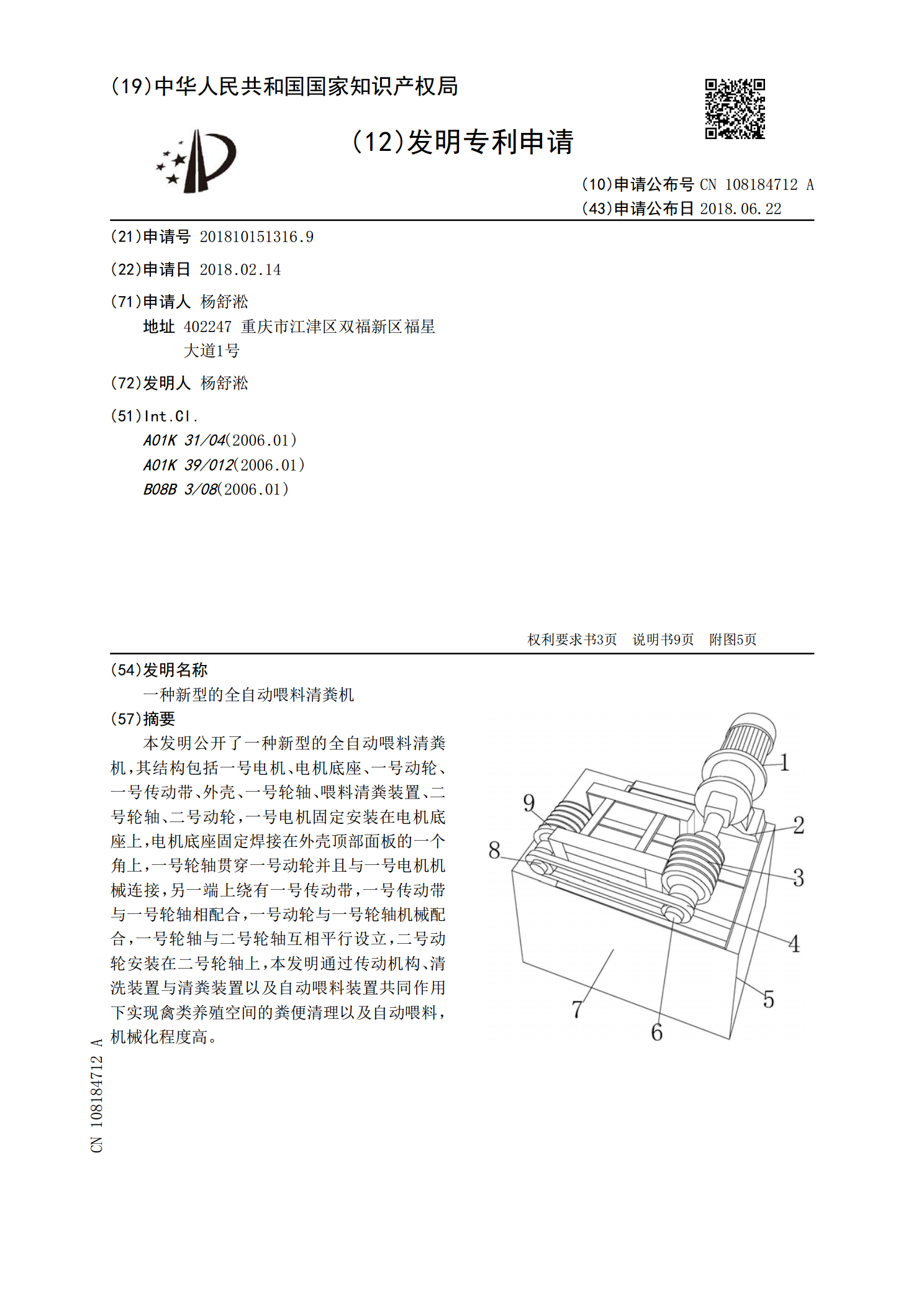
本发明公开了一种新型的全自动喂料清粪机,其结构包括一号电机、电机底座、一号动轮、一号传动带、外壳、一号轮轴、喂料清粪装置、二号轮轴、二号动轮,一号电机固定安装在电机底座上,电机底座固定焊接在外壳顶部面板的一个角上,一号轮轴贯穿一号动轮并且与一号电机机械连接,另一端上绕有一号传动带,一号传动带与一号轮轴相配合,一号动轮与一号轮轴机械配合,一号轮轴与二号轮轴互相平行设立,二号动轮安装在二号轮轴上,本发明通过传动机构、清洗装置与清粪装置以及自动喂料装置共同作用下实现禽类养殖空间的粪便清理以及自动喂料,机械化程度
一种全自动清粪机.pdf
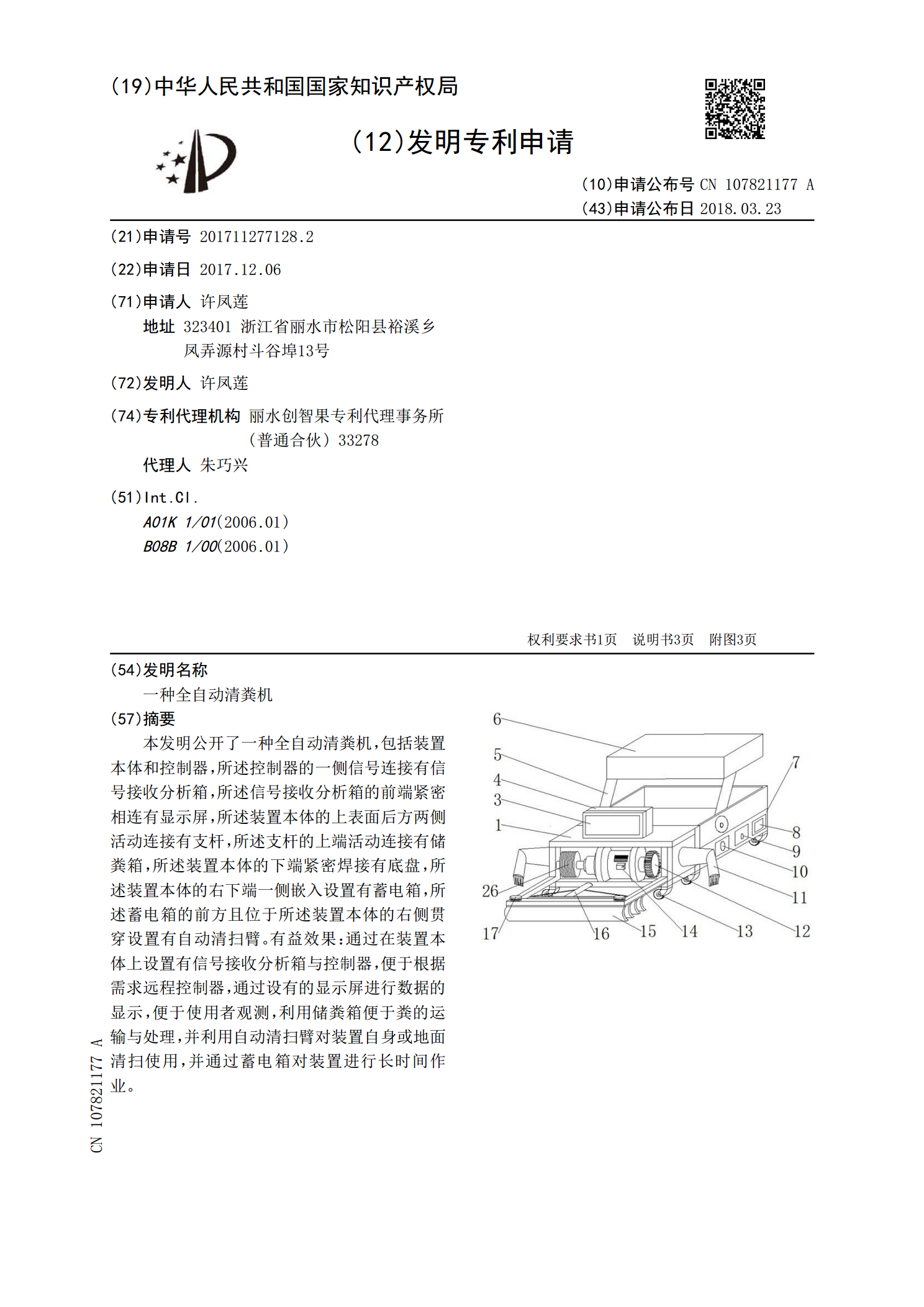
本发明公开了一种全自动清粪机,包括装置本体和控制器,所述控制器的一侧信号连接有信号接收分析箱,所述信号接收分析箱的前端紧密相连有显示屏,所述装置本体的上表面后方两侧活动连接有支杆,所述支杆的上端活动连接有储粪箱,所述装置本体的下端紧密焊接有底盘,所述装置本体的右下端一侧嵌入设置有蓄电箱,所述蓄电箱的前方且位于所述装置本体的右侧贯穿设置有自动清扫臂。有益效果:通过在装置本体上设置有信号接收分析箱与控制器,便于根据需求远程控制器,通过设有的显示屏进行数据的显示,便于使用者观测,利用储粪箱便于粪的运输与处理,并

一种清粪机.pdf
本发明公开了一种工作时不易打滑的清粪机。本发明包括支架、拉绳、与拉绳连接的刮粪板、与拉绳配合的滑轮和主动轮,滑轮和主动轮均装在支架上,主动轮上设有摇把,所述滑轮分为第一导向滑轮、第二导向滑轮和定滑轮,所述主动轮相邻处设有防滑轮,与主动轮和防滑轮配合处的拉绳呈“S”状跨过主动轮和防滑轮,拉绳上吊挂有调节装置,调节装置位于定滑轮前端。防滑轮紧靠主动轮,增加了拉绳与主动轮的摩擦力;调节装置调节拉绳的张力到最佳状态进一步提高磨擦力。使用时,摇动主动轮1上的摇把,使主动轮1带动拉绳6移动,刮粪板7从粪槽最里面向外移
一种环绕式自动喂料清粪养殖设备.pdf
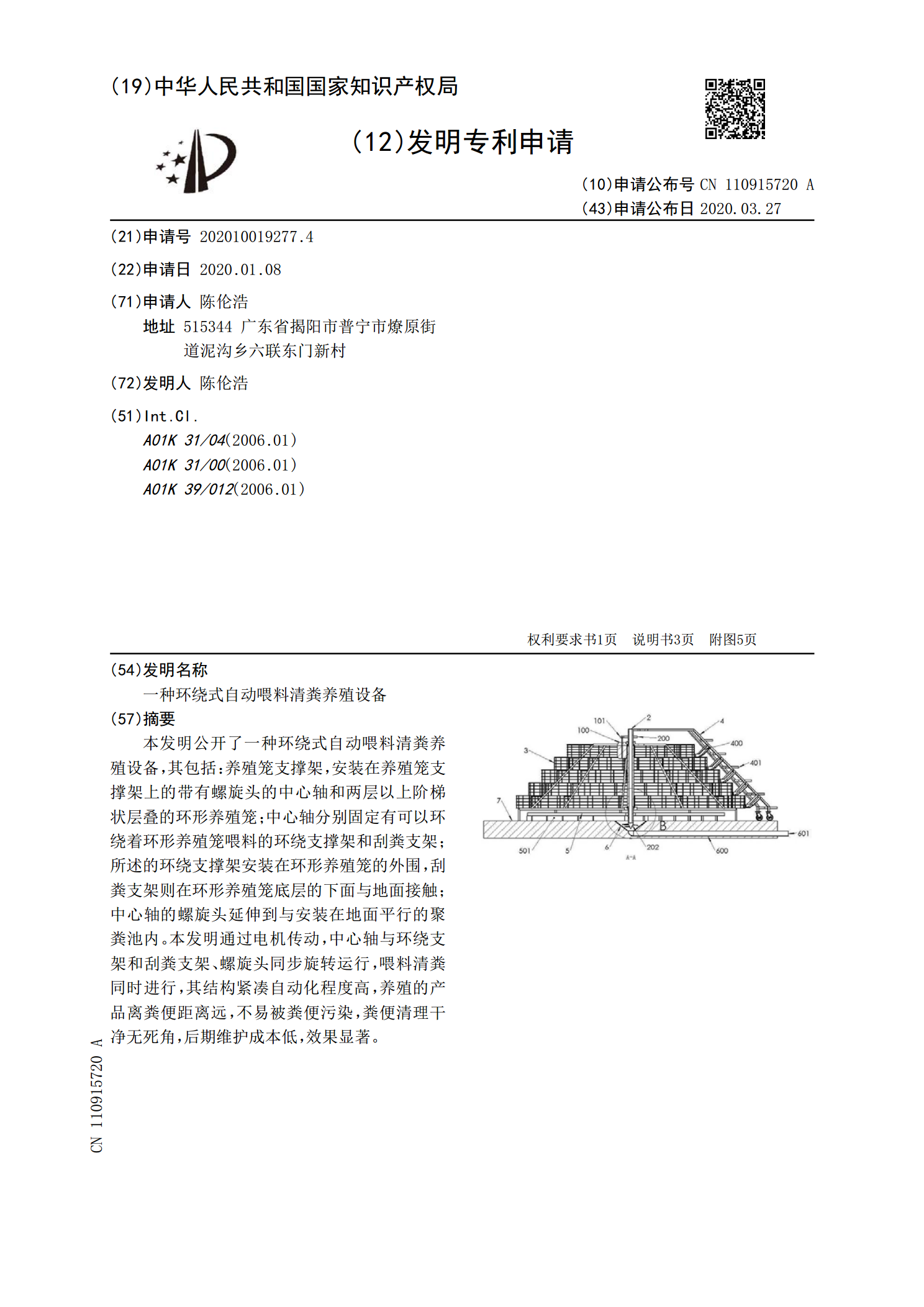
本发明公开了一种环绕式自动喂料清粪养殖设备,其包括:养殖笼支撑架,安装在养殖笼支撑架上的带有螺旋头的中心轴和两层以上阶梯状层叠的环形养殖笼;中心轴分别固定有可以环绕着环形养殖笼喂料的环绕支撑架和刮粪支架;所述的环绕支撑架安装在环形养殖笼的外围,刮粪支架则在环形养殖笼底层的下面与地面接触;中心轴的螺旋头延伸到与安装在地面平行的聚粪池内。本发明通过电机传动,中心轴与环绕支架和刮粪支架、螺旋头同步旋转运行,喂料清粪同时进行,其结构紧凑自动化程度高,养殖的产品离粪便距离远,不易被粪便污染,粪便清理干净无死角,后期