
一种从三个方向夹住工件的定位抓取装置.pdf

Ch****75

1/9
2/9
3/9
4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种从三个方向夹住工件的定位抓取装置.pdf
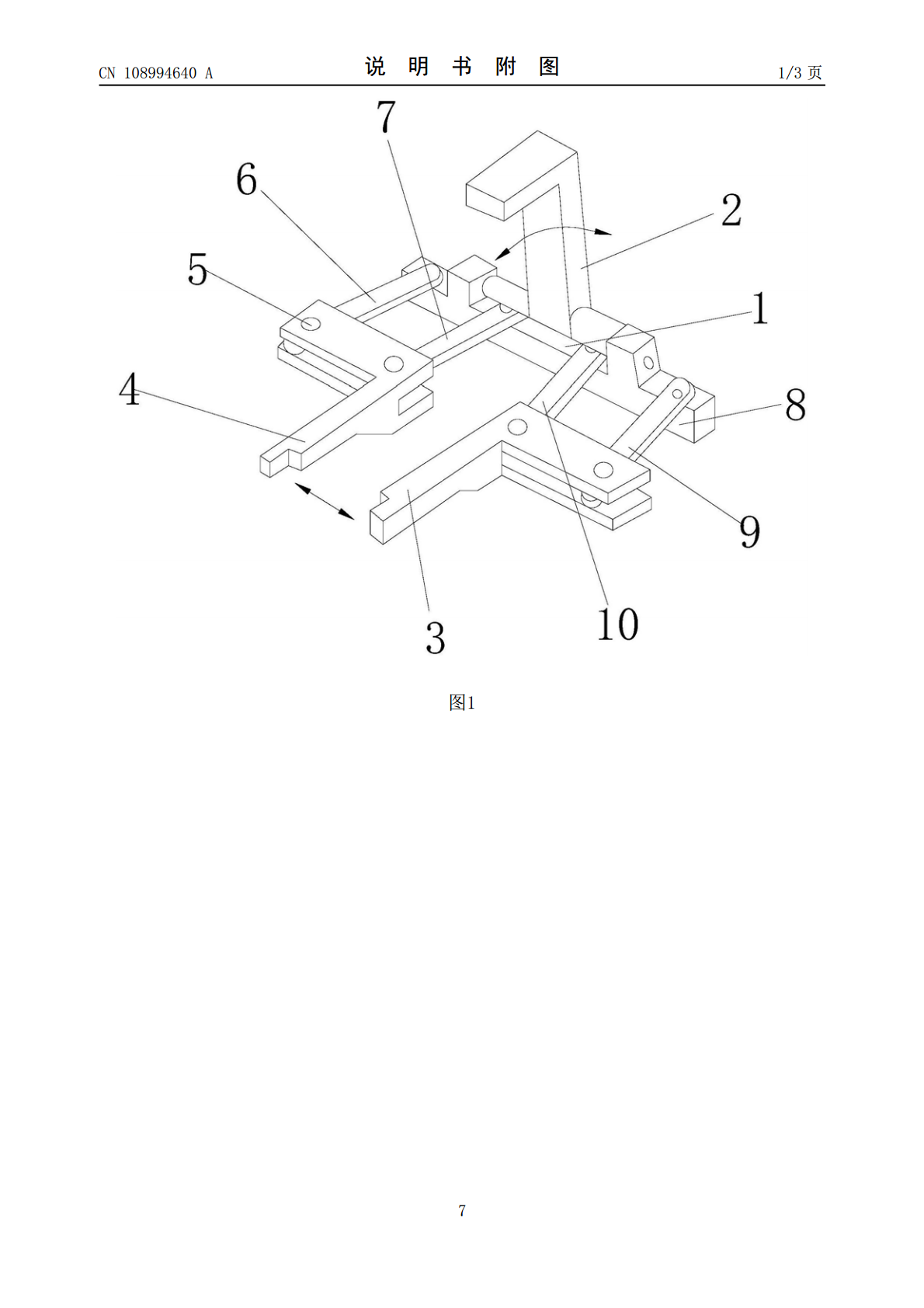
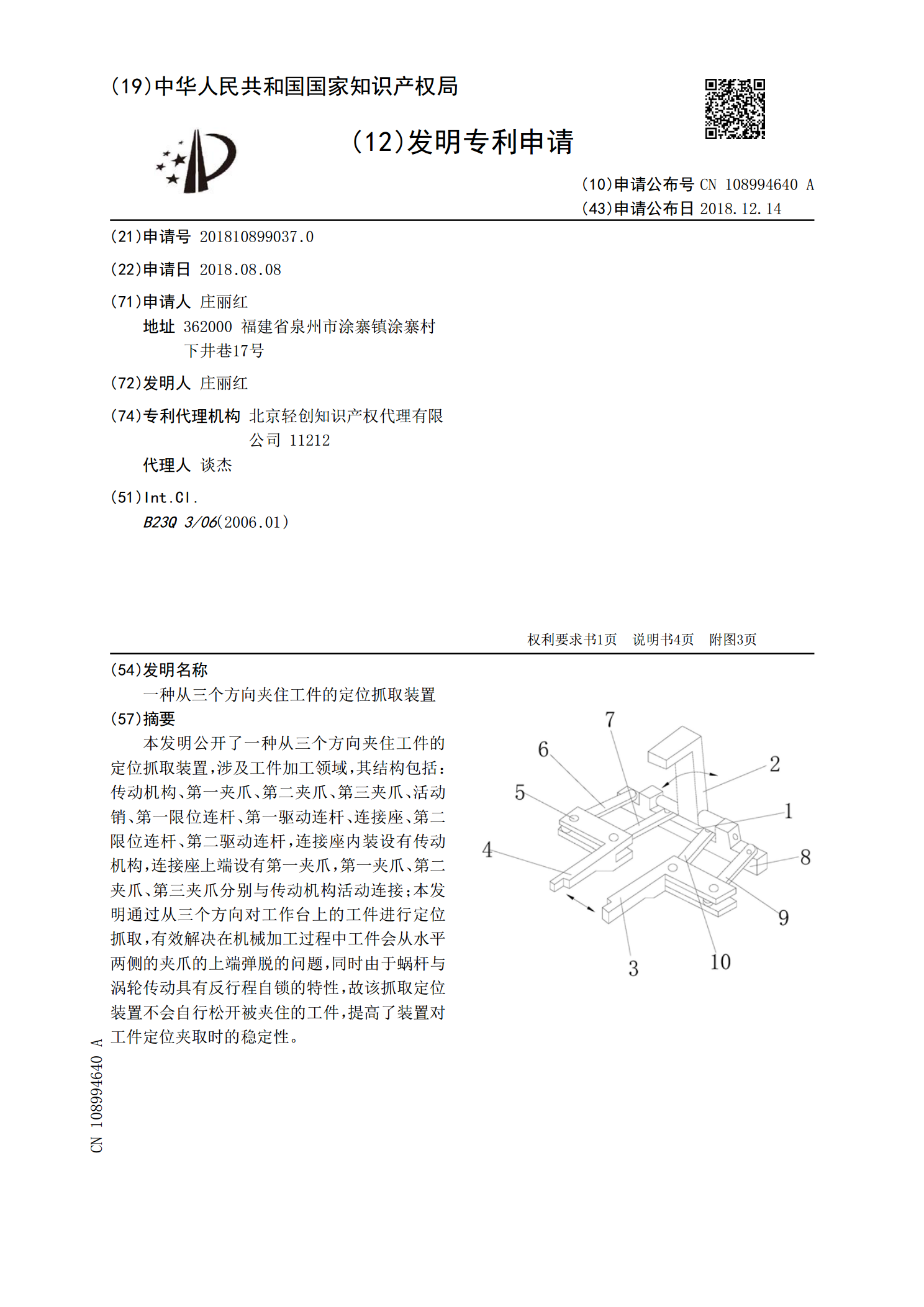
本发明公开了一种从三个方向夹住工件的定位抓取装置,涉及工件加工领域,其结构包括:传动机构、第一夹爪、第二夹爪、第三夹爪、活动销、第一限位连杆、第一驱动连杆、连接座、第二限位连杆、第二驱动连杆,连接座内装设有传动机构,连接座上端设有第一夹爪,第一夹爪、第二夹爪、第三夹爪分别与传动机构活动连接;本发明通过从三个方向对工作台上的工件进行定位抓取,有效解决在机械加工过程中工件会从水平两侧的夹爪的上端弹脱的问题,同时由于蜗杆与涡轮传动具有反行程自锁的特性,故该抓取定位装置不会自行松开被夹住的工件,提高了装置对工件定
一种玻璃瓶工件抓取及瓶口方向调整装置.pdf
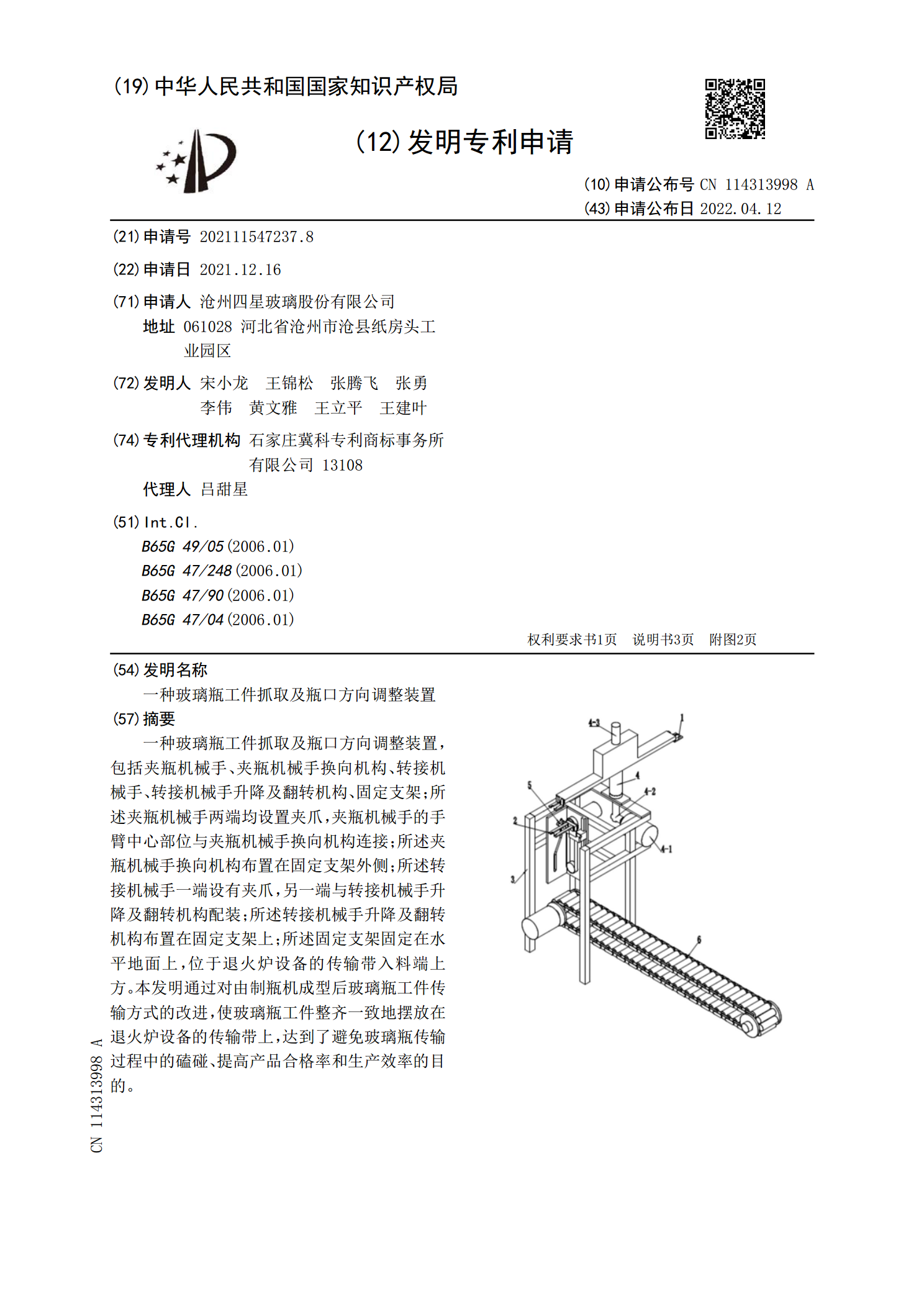
一种玻璃瓶工件抓取及瓶口方向调整装置,包括夹瓶机械手、夹瓶机械手换向机构、转接机械手、转接机械手升降及翻转机构、固定支架;所述夹瓶机械手两端均设置夹爪,夹瓶机械手的手臂中心部位与夹瓶机械手换向机构连接;所述夹瓶机械手换向机构布置在固定支架外侧;所述转接机械手一端设有夹爪,另一端与转接机械手升降及翻转机构配装;所述转接机械手升降及翻转机构布置在固定支架上;所述固定支架固定在水平地面上,位于退火炉设备的传输带入料端上方。本发明通过对由制瓶机成型后玻璃瓶工件传输方式的改进,使玻璃瓶工件整齐一致地摆放在退火炉设备
工件自动在线抓取装置.pdf
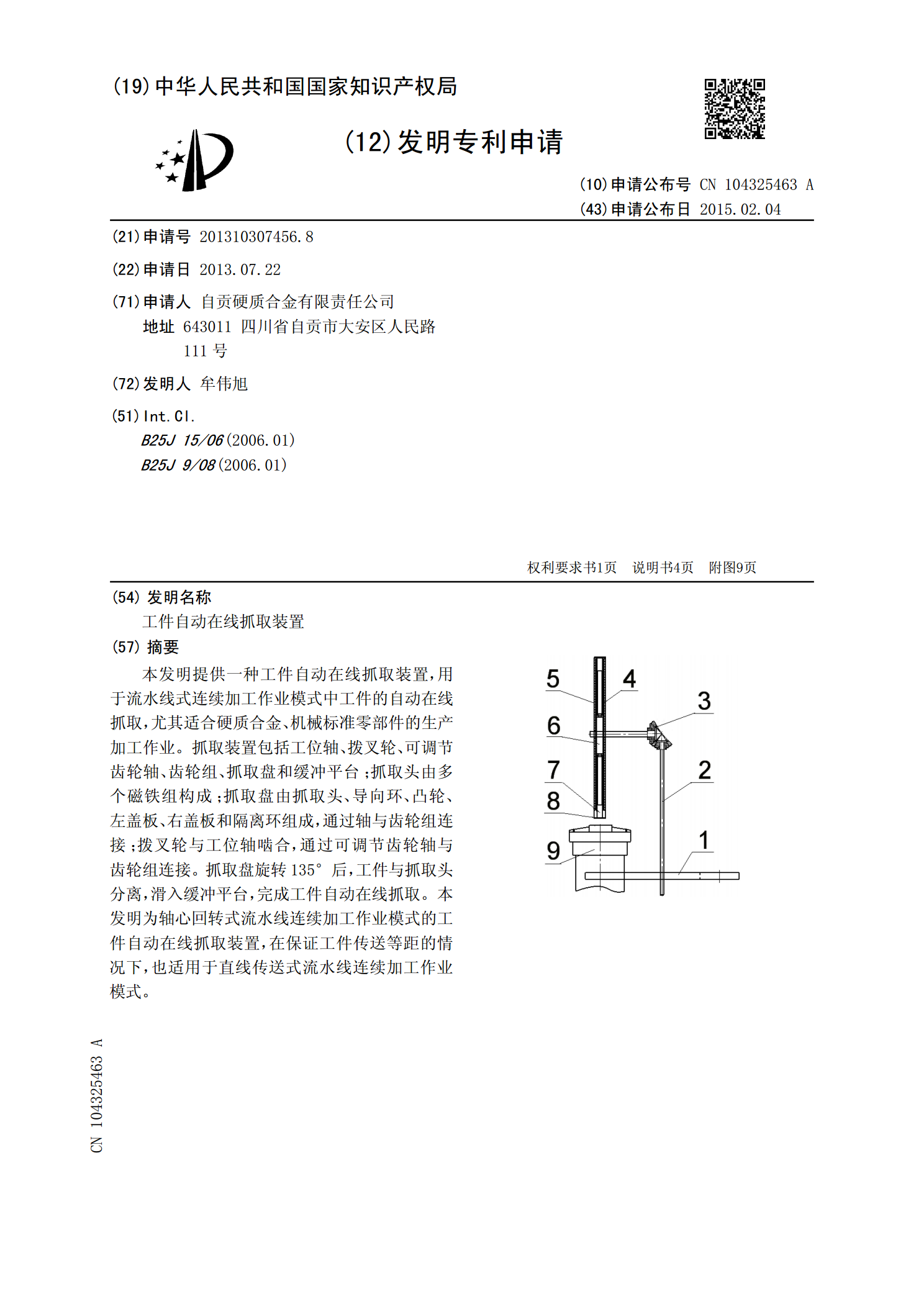
本发明提供一种工件自动在线抓取装置,用于流水线式连续加工作业模式中工件的自动在线抓取,尤其适合硬质合金、机械标准零部件的生产加工作业。抓取装置包括工位轴、拨叉轮、可调节齿轮轴、齿轮组、抓取盘和缓冲平台;抓取头由多个磁铁组构成;抓取盘由抓取头、导向环、凸轮、左盖板、右盖板和隔离环组成,通过轴与齿轮组连接;拨叉轮与工位轴啮合,通过可调节齿轮轴与齿轮组连接。抓取盘旋转135°后,工件与抓取头分离,滑入缓冲平台,完成工件自动在线抓取。本发明为轴心回转式流水线连续加工作业模式的工件自动在线抓取装置,在保证工件传送等
一种工件定位装置.pdf
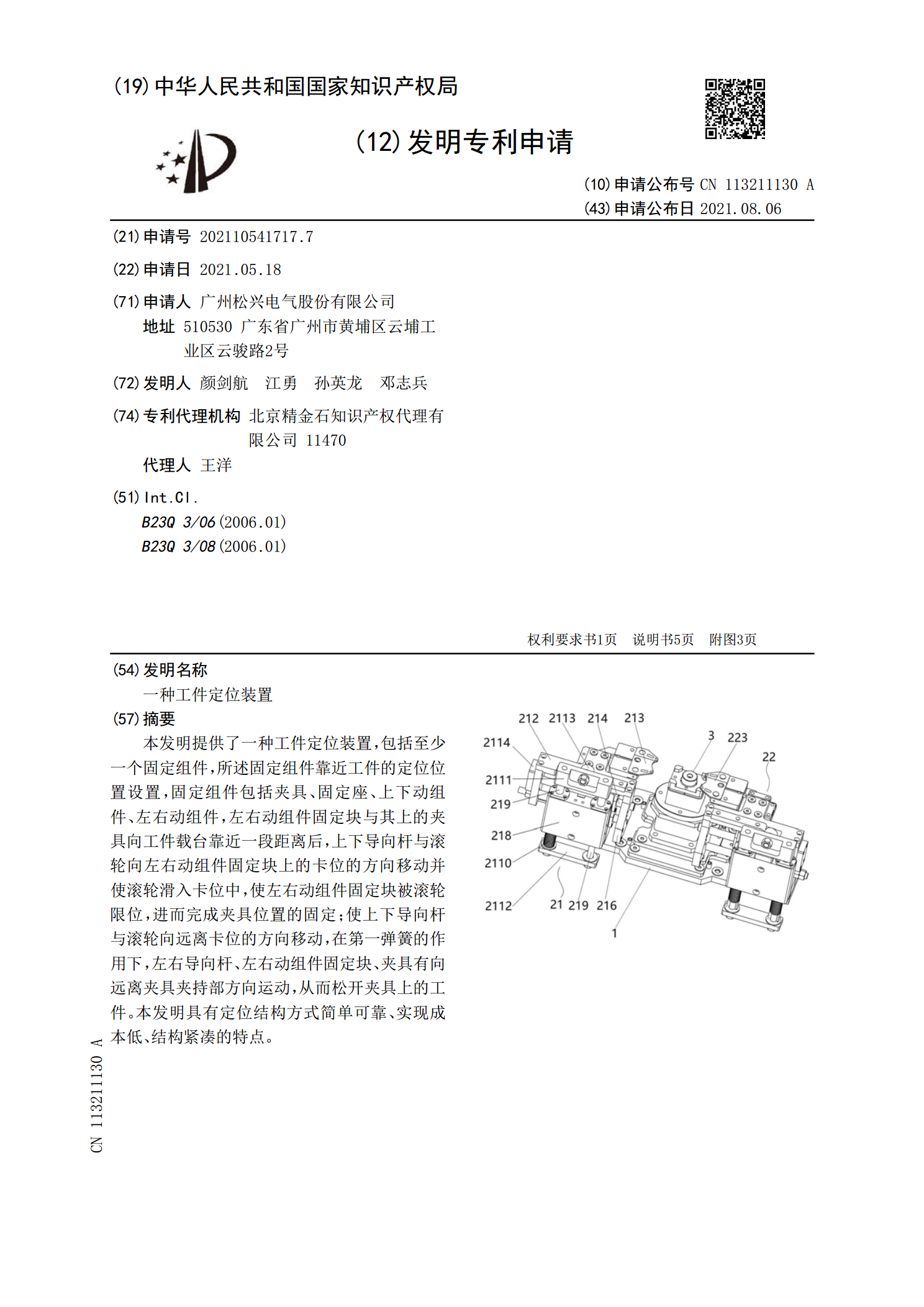
本发明提供了一种工件定位装置,包括至少一个固定组件,所述固定组件靠近工件的定位位置设置,固定组件包括夹具、固定座、上下动组件、左右动组件,左右动组件固定块与其上的夹具向工件载台靠近一段距离后,上下导向杆与滚轮向左右动组件固定块上的卡位的方向移动并使滚轮滑入卡位中,使左右动组件固定块被滚轮限位,进而完成夹具位置的固定;使上下导向杆与滚轮向远离卡位的方向移动,在第一弹簧的作用下,左右导向杆、左右动组件固定块、夹具有向远离夹具夹持部方向运动,从而松开夹具上的工件。本发明具有定位结构方式简单可靠、实现成本低、结构
一种圆柱体工件抓取机构装置.pdf
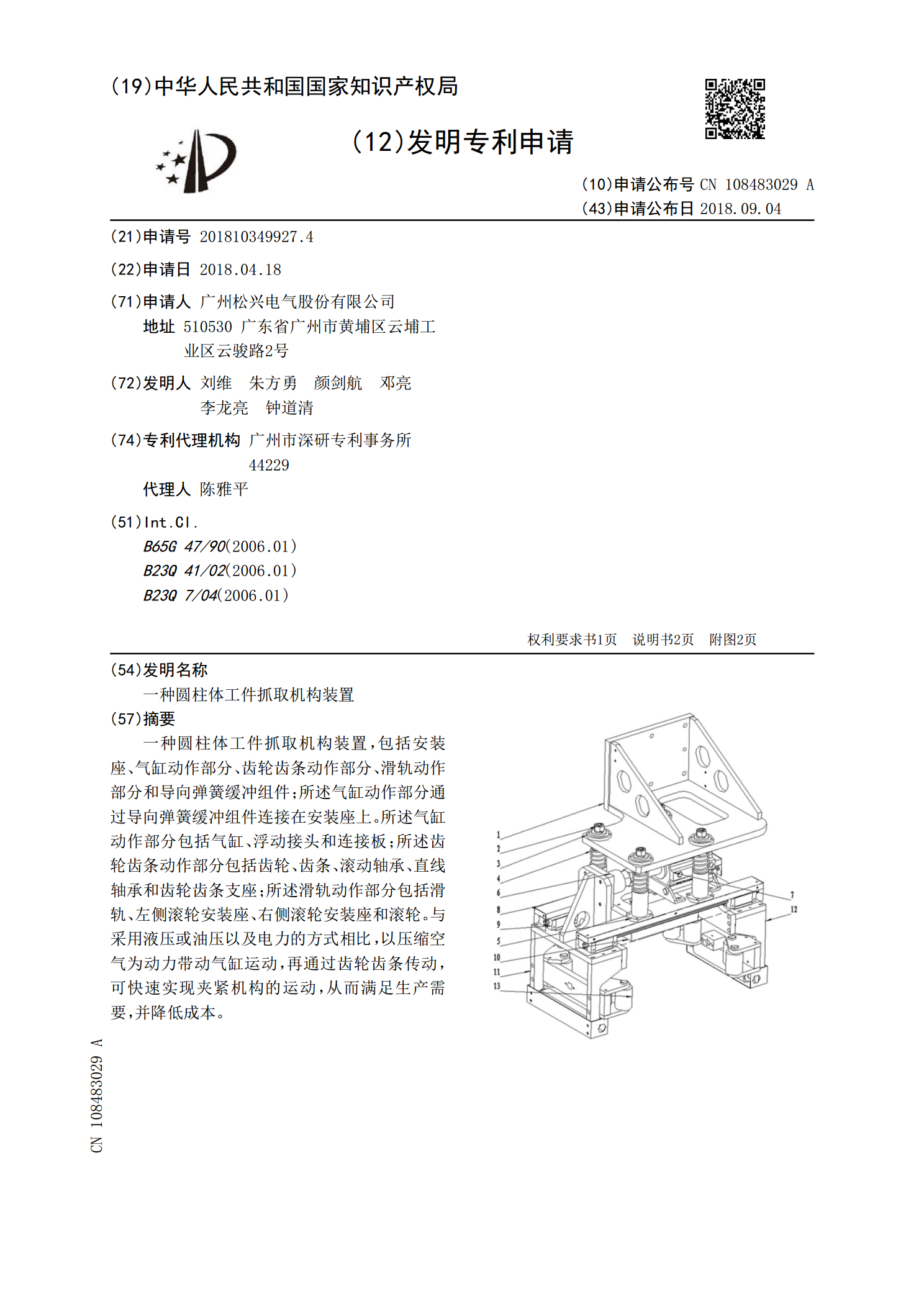
一种圆柱体工件抓取机构装置,包括安装座、气缸动作部分、齿轮齿条动作部分、滑轨动作部分和导向弹簧缓冲组件;所述气缸动作部分通过导向弹簧缓冲组件连接在安装座上。所述气缸动作部分包括气缸、浮动接头和连接板;所述齿轮齿条动作部分包括齿轮、齿条、滚动轴承、直线轴承和齿轮齿条支座;所述滑轨动作部分包括滑轨、左侧滚轮安装座、右侧滚轮安装座和滚轮。与采用液压或油压以及电力的方式相比,以压缩空气为动力带动气缸运动,再通过齿轮齿条传动,可快速实现夹紧机构的运动,从而满足生产需要,并降低成本。