
一种基于深度学习的机柜灯状态识别方法.pdf

书生****12

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于深度学习的机柜灯状态识别方法.pdf
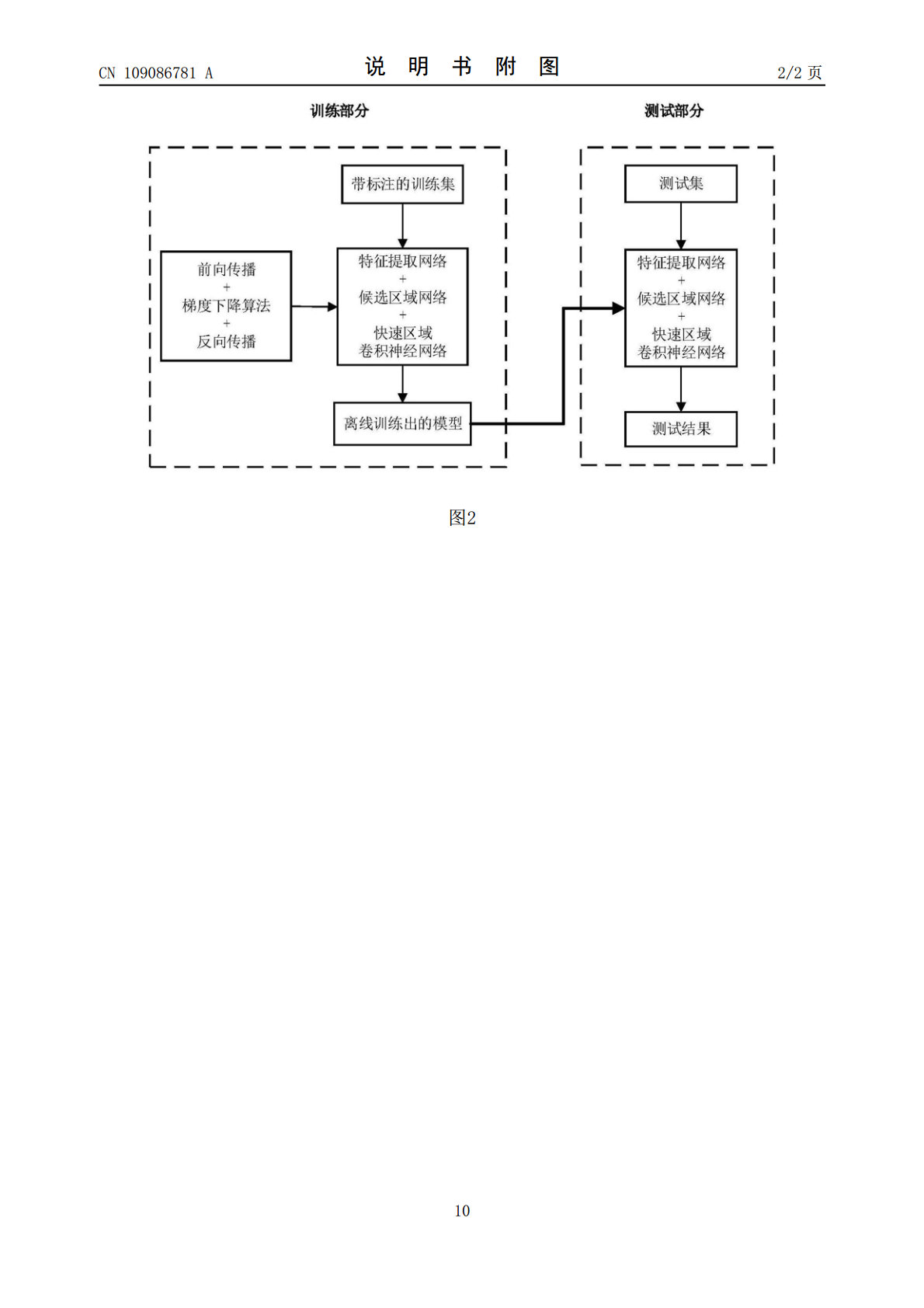
本发明提供一种基于深度学习的机柜灯状态识别方法,包括以下步骤:初始化模型参数,获得模型与对应的模型参数;通过相机获取机柜灯状态的图片;基于深度学习技术识别图片中的灯和灯组;根据不同机柜状态设置不同的识别目标和判断异常的阈值;基于寻找轮廓的算法获得实际工作中机柜灯组内灯的数量;将所述灯的数量与所述阈值进行比较,进而识别机柜灯的状态。本发明通过引入深度学习技术,能够实现自动识别机柜灯状态的目的,进而判断机柜是否正常工作。本发明无需在机柜内植入软件或串接新的设备,工作过程不受环境影响,工作效率、识别精度和鲁棒性
一种基于深度学习的指示灯识别方法.pdf
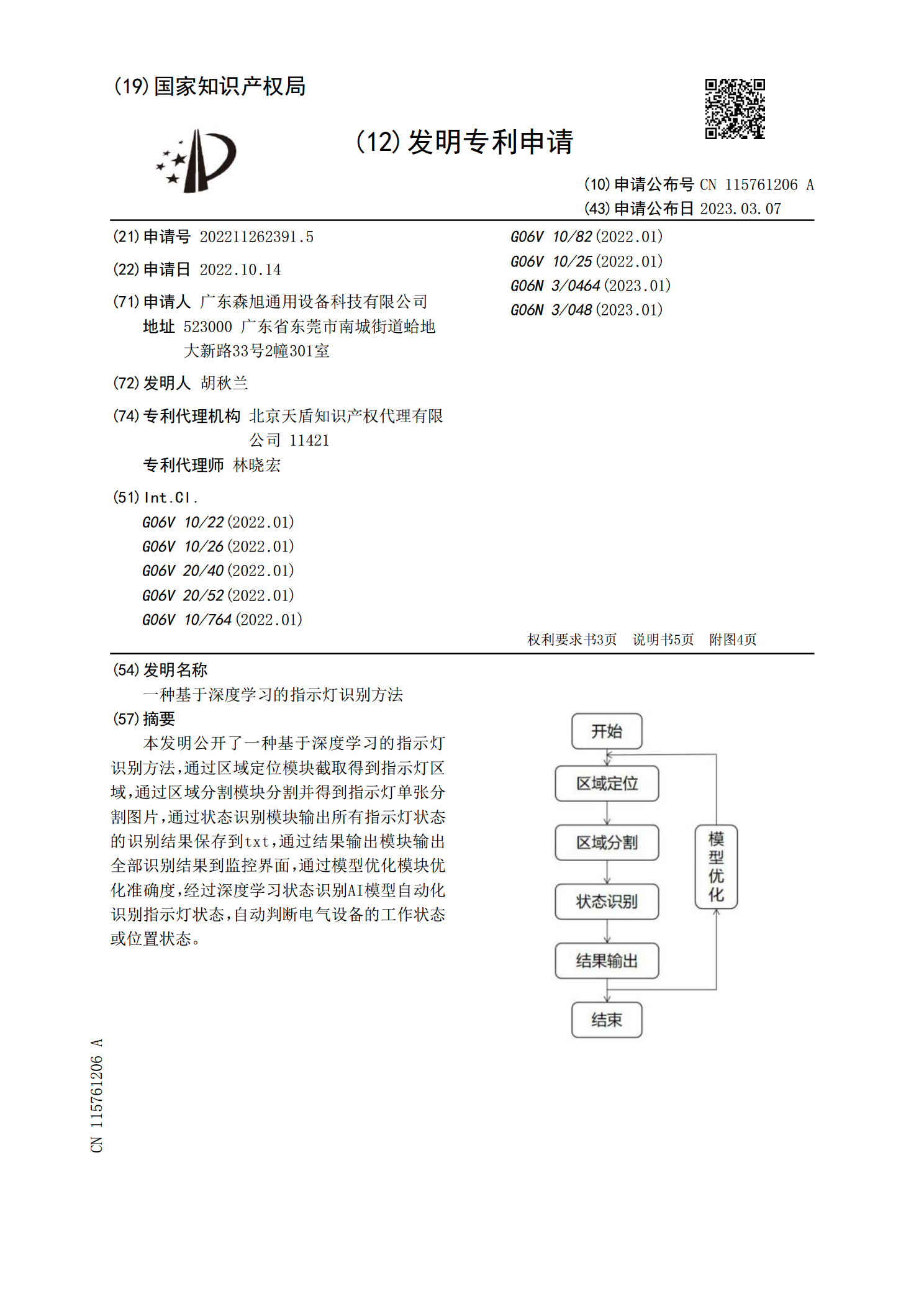
本发明公开了一种基于深度学习的指示灯识别方法,通过区域定位模块截取得到指示灯区域,通过区域分割模块分割并得到指示灯单张分割图片,通过状态识别模块输出所有指示灯状态的识别结果保存到txt,通过结果输出模块输出全部识别结果到监控界面,通过模型优化模块优化准确度,经过深度学习状态识别AI模型自动化识别指示灯状态,自动判断电气设备的工作状态或位置状态。
基于深度学习的交通灯识别方法.pdf
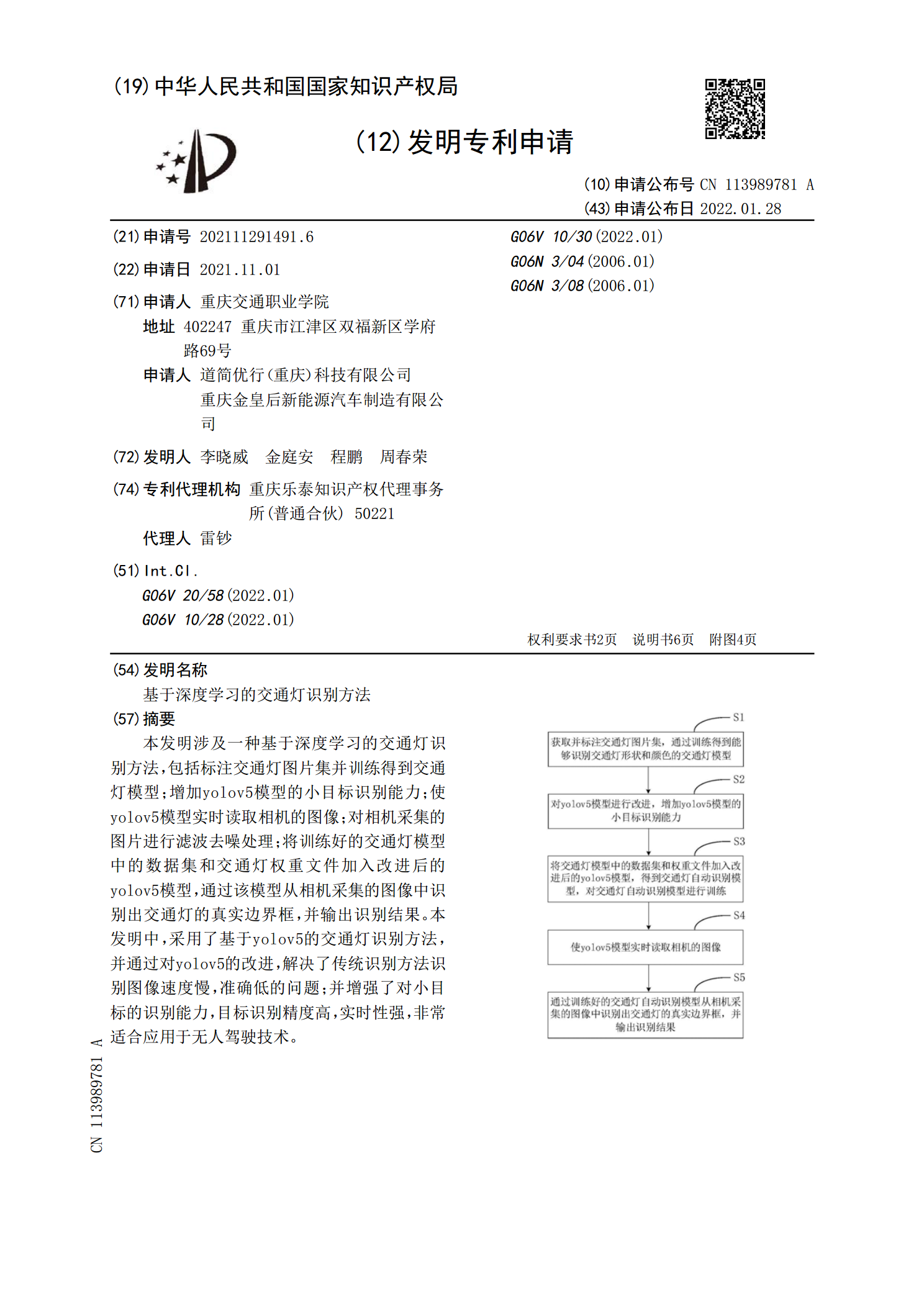
本发明涉及一种基于深度学习的交通灯识别方法,包括标注交通灯图片集并训练得到交通灯模型;增加yolov5模型的小目标识别能力;使yolov5模型实时读取相机的图像;对相机采集的图片进行滤波去噪处理;将训练好的交通灯模型中的数据集和交通灯权重文件加入改进后的yolov5模型,通过该模型从相机采集的图像中识别出交通灯的真实边界框,并输出识别结果。本发明中,采用了基于yolov5的交通灯识别方法,并通过对yolov5的改进,解决了传统识别方法识别图像速度慢,准确低的问题;并增强了对小目标的识别能力,目标识别精度高

一种基于深度学习的人员口罩佩戴状态检测识别方法.pdf
本发明公开了一种基于深度学习的人员口罩佩戴状态检测识别方法。主要步骤包括:获取数据集;设计人脸检测网络,并在网络中添加第一特征向量输出;将检测到的口罩人脸区域通过比例随机裁剪输入第二深度学习网络模型的第一网络部分,第二网络部分和第三网络部分以获得三个代表全局、局部和细粒度特征的特征图;将三个特征图进行特征融合得到第二特征向量;将第一特征向量和第二特征向量融合,最后使用机器学习模型识别人脸口罩佩戴状态。这样,基于优化设计的神经网络,提取不同层次的深度特征并融合,能大幅提高人脸口罩佩戴状态识别的准确率。
一种基于动作-状态联合学习的车辆尾灯状态识别方法.pdf
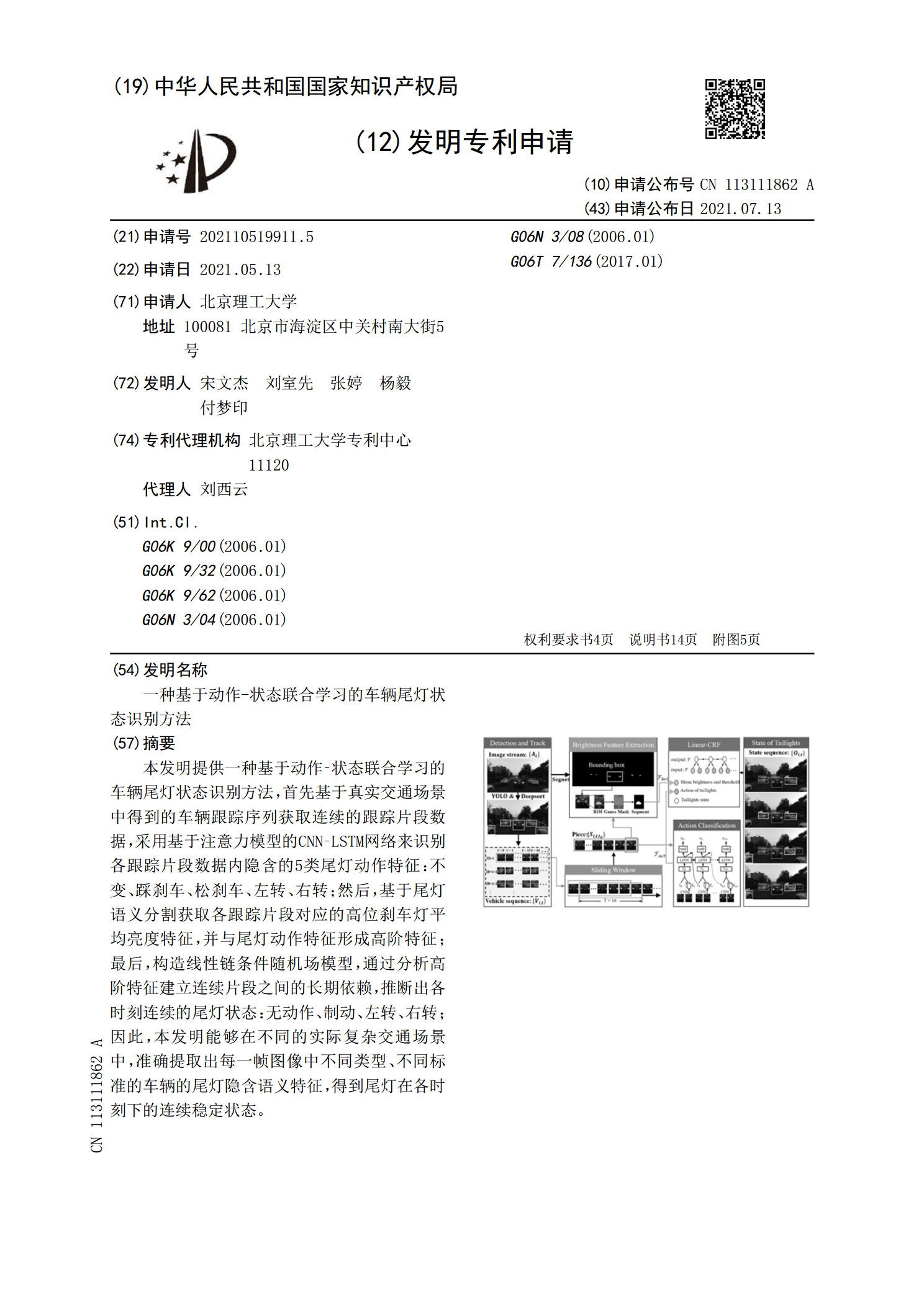
本发明提供一种基于动作?状态联合学习的车辆尾灯状态识别方法,首先基于真实交通场景中得到的车辆跟踪序列获取连续的跟踪片段数据,采用基于注意力模型的CNN?LSTM网络来识别各跟踪片段数据内隐含的5类尾灯动作特征:不变、踩刹车、松刹车、左转、右转;然后,基于尾灯语义分割获取各跟踪片段对应的高位刹车灯平均亮度特征,并与尾灯动作特征形成高阶特征;最后,构造线性链条件随机场模型,通过分析高阶特征建立连续片段之间的长期依赖,推断出各时刻连续的尾灯状态:无动作、制动、左转、右转;因此,本发明能够在不同的实际复杂交通场景