
一种多功能可伸缩式船舶矢量螺旋减摇臂.pdf

莉娜****ua

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多功能可伸缩式船舶矢量螺旋减摇臂.pdf
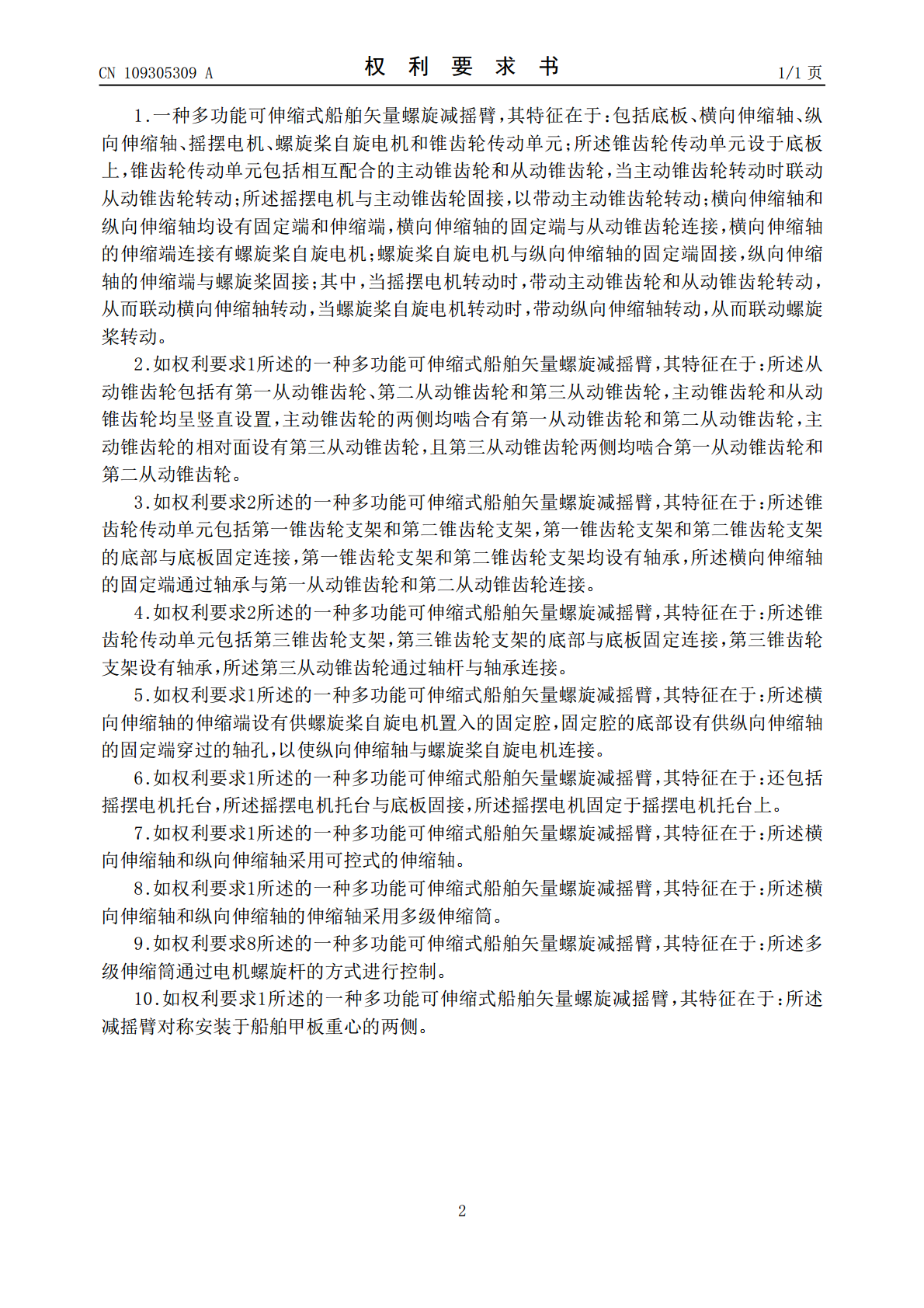
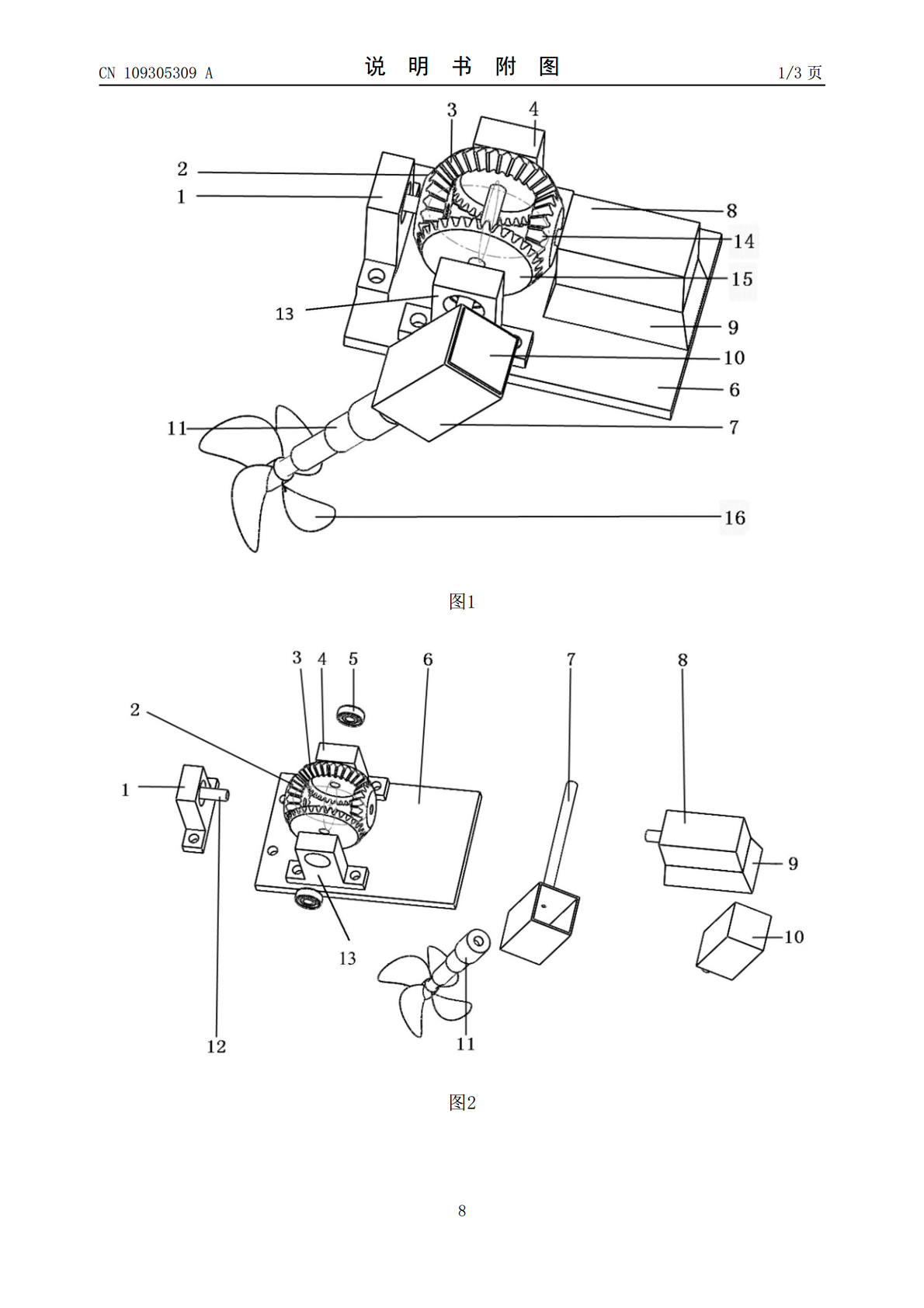
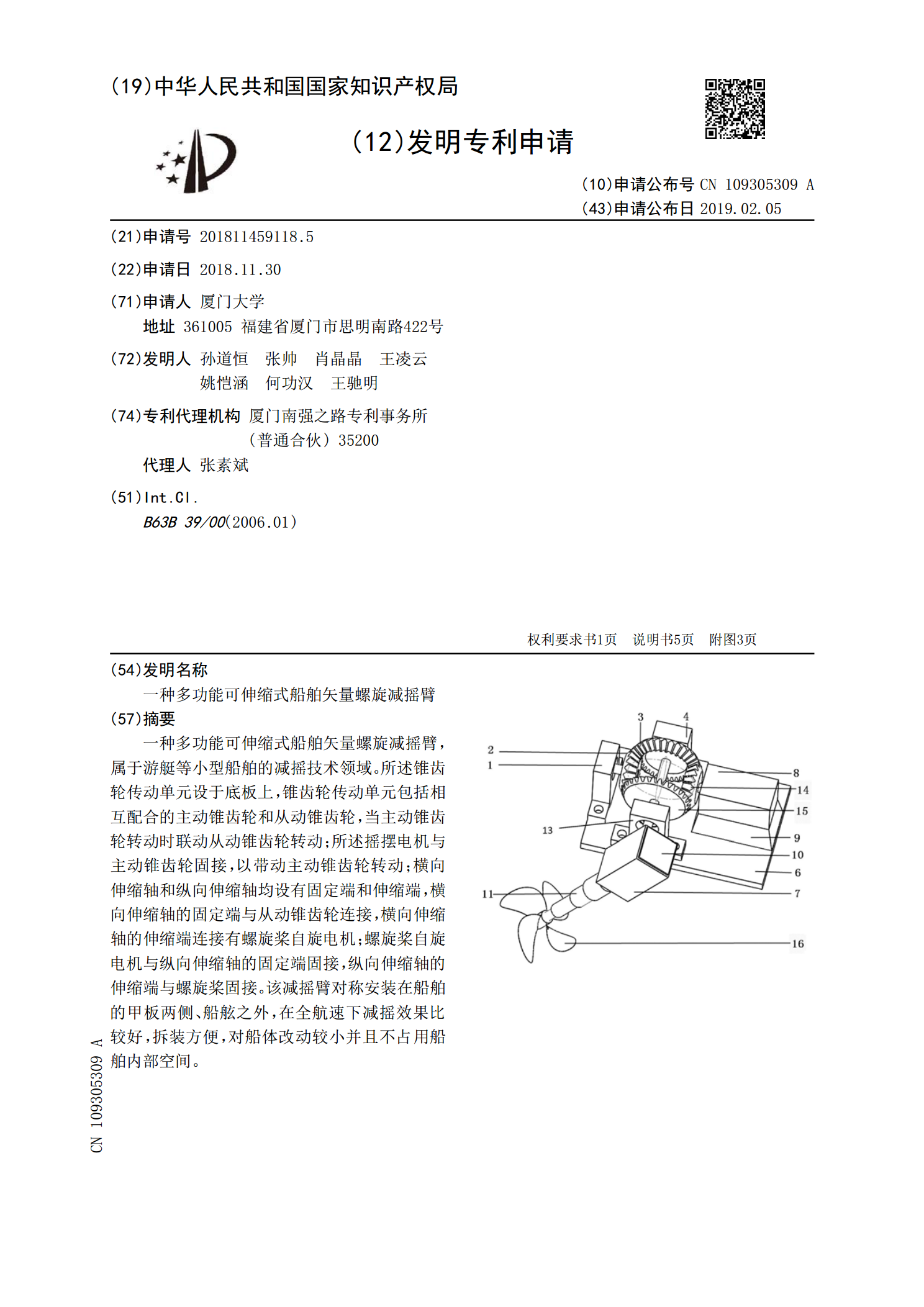
一种多功能可伸缩式船舶矢量螺旋减摇臂,属于游艇等小型船舶的减摇技术领域。所述锥齿轮传动单元设于底板上,锥齿轮传动单元包括相互配合的主动锥齿轮和从动锥齿轮,当主动锥齿轮转动时联动从动锥齿轮转动;所述摇摆电机与主动锥齿轮固接,以带动主动锥齿轮转动;横向伸缩轴和纵向伸缩轴均设有固定端和伸缩端,横向伸缩轴的固定端与从动锥齿轮连接,横向伸缩轴的伸缩端连接有螺旋桨自旋电机;螺旋桨自旋电机与纵向伸缩轴的固定端固接,纵向伸缩轴的伸缩端与螺旋桨固接。该减摇臂对称安装在船舶的甲板两侧、船舷之外,在全航速下减摇效果比较好,拆装
一种可伸缩式多功能检测尺.pdf
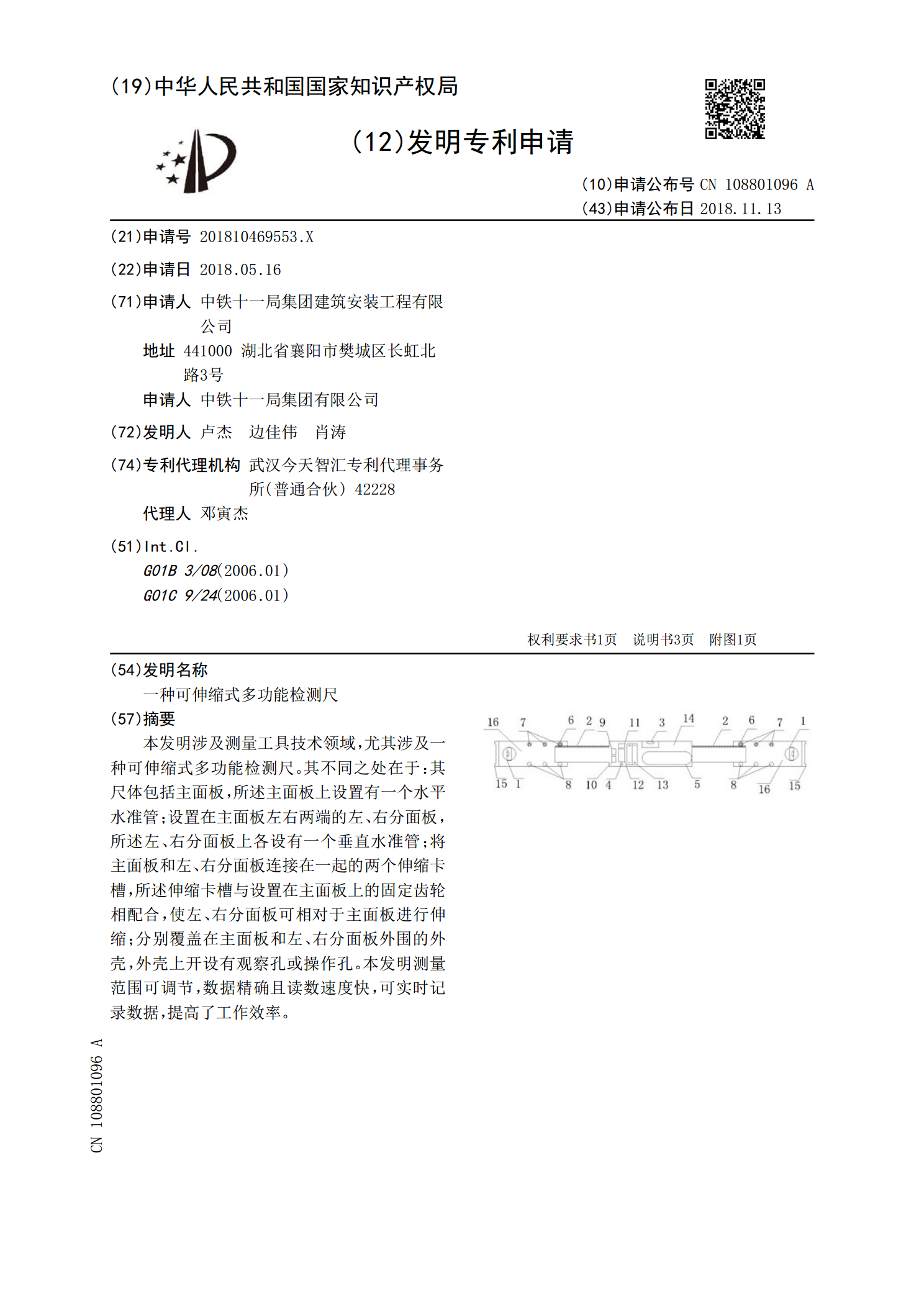
本发明涉及测量工具技术领域,尤其涉及一种可伸缩式多功能检测尺。其不同之处在于:其尺体包括主面板,所述主面板上设置有一个水平水准管;设置在主面板左右两端的左、右分面板,所述左、右分面板上各设有一个垂直水准管;将主面板和左、右分面板连接在一起的两个伸缩卡槽,所述伸缩卡槽与设置在主面板上的固定齿轮相配合,使左、右分面板可相对于主面板进行伸缩;分别覆盖在主面板和左、右分面板外围的外壳,外壳上开设有观察孔或操作孔。本发明测量范围可调节,数据精确且读数速度快,可实时记录数据,提高了工作效率。

一种可提高船舶航行效能的子螺旋桨舵及其船舶.pdf
本发明涉及船舶的动力性能及其操纵系统,特别涉及一种可提高船舶航行效能的子螺旋桨舵及其船舶,该子螺旋桨舵包括竖直设置于船尾并与船的龙骨延伸线相垂直的舵轴、V型支架、包括滚筒叶片和滚轴组成的回收滚筒、齿轮箱组件、子螺旋桨和安全罩,通过尾流产生的冲击力给滚筒叶片施加驱动力,使滚筒叶片带动齿轮箱组件中的齿轮转动,进而促进子螺旋桨旋转,产生对船舶向前的驱动力和转向力,减少了船舶尾流的兴波阻力,消除螺旋桨直冲舵叶的阻力,同时舵轴的角度调整能够对该子螺旋桨舵起到整体的转向作用,使应用该子螺旋桨舵的船舶航行更平稳、舵效更

一种可提高船舶航行效能的子螺旋桨舵及其船舶.pdf
本发明涉及船舶的动力性能及其操纵系统,特别涉及一种可提高船舶航行效能的子螺旋桨舵及其船舶,该子螺旋桨舵包括竖直设置于船尾并与船的龙骨延伸线相垂直的舵轴、V型支架、包括滚筒叶片和滚轴组成的回收滚筒、齿轮箱组件、子螺旋桨和安全罩,通过尾流产生的冲击力给滚筒叶片施加驱动力,使滚筒叶片带动齿轮箱组件中的齿轮转动,进而促进子螺旋桨旋转,产生对船舶向前的驱动力和转向力,减少了船舶尾流的兴波阻力,消除螺旋桨直冲舵叶的阻力,同时舵轴的角度调整能够对该子螺旋桨舵起到整体的转向作用,使应用该子螺旋桨舵的船舶航行更平稳、舵效更
一种可伸缩式多功能机械间歇传动装置.pdf
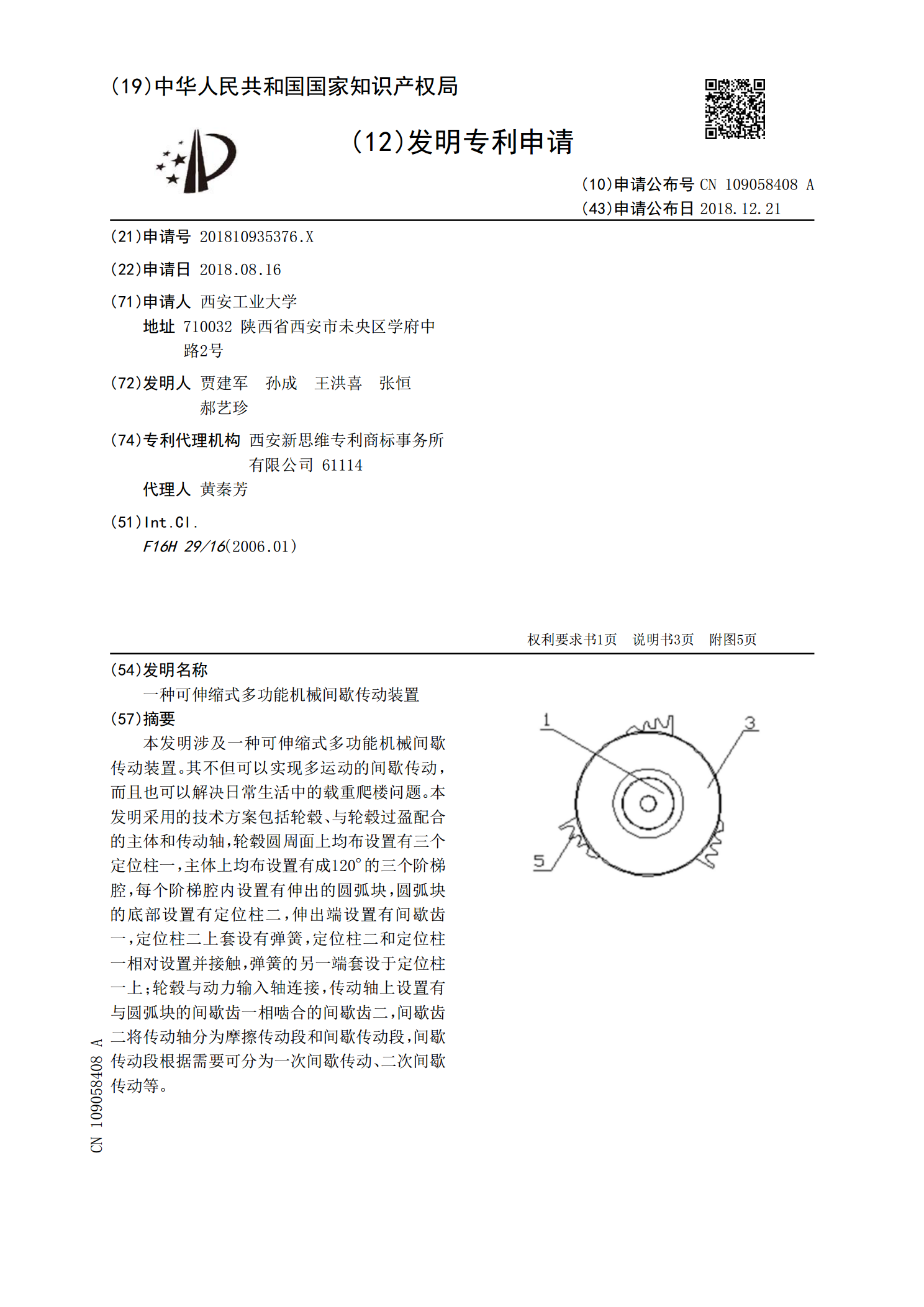
本发明涉及一种可伸缩式多功能机械间歇传动装置。其不但可以实现多运动的间歇传动,而且也可以解决日常生活中的载重爬楼问题。本发明采用的技术方案包括轮毂、与轮毂过盈配合的主体和传动轴,轮毂圆周面上均布设置有三个定位柱一,主体上均布设置有成120°的三个阶梯腔,每个阶梯腔内设置有伸出的圆弧块,圆弧块的底部设置有定位柱二,伸出端设置有间歇齿一,定位柱二上套设有弹簧,定位柱二和定位柱一相对设置并接触,弹簧的另一端套设于定位柱一上;轮毂与动力输入轴连接,传动轴上设置有与圆弧块的间歇齿一相啮合的间歇齿二,间歇齿二将传动轴