
一种机械手系统及其操作方法.pdf

是你****岺呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机械手系统及其操作方法.pdf
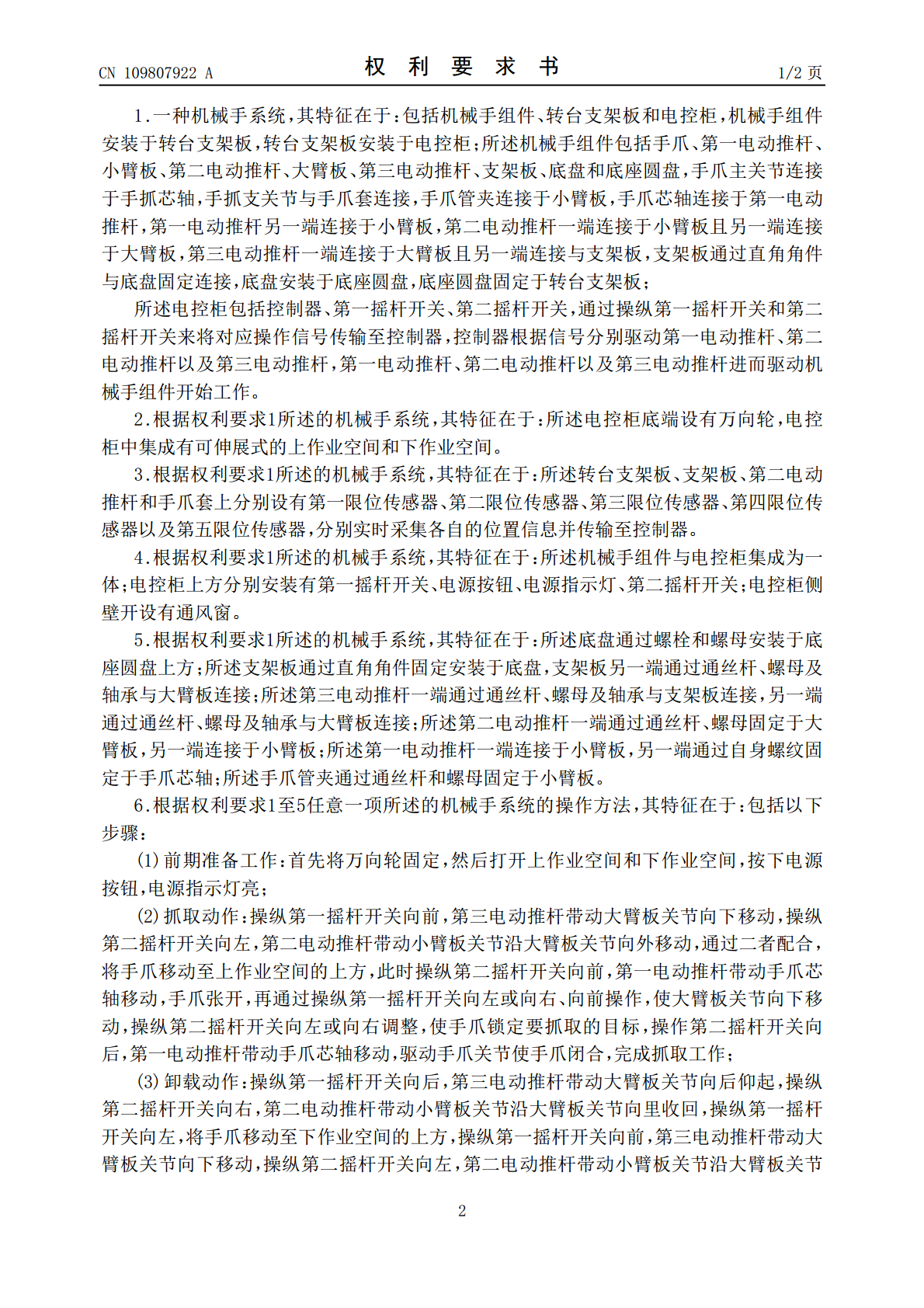
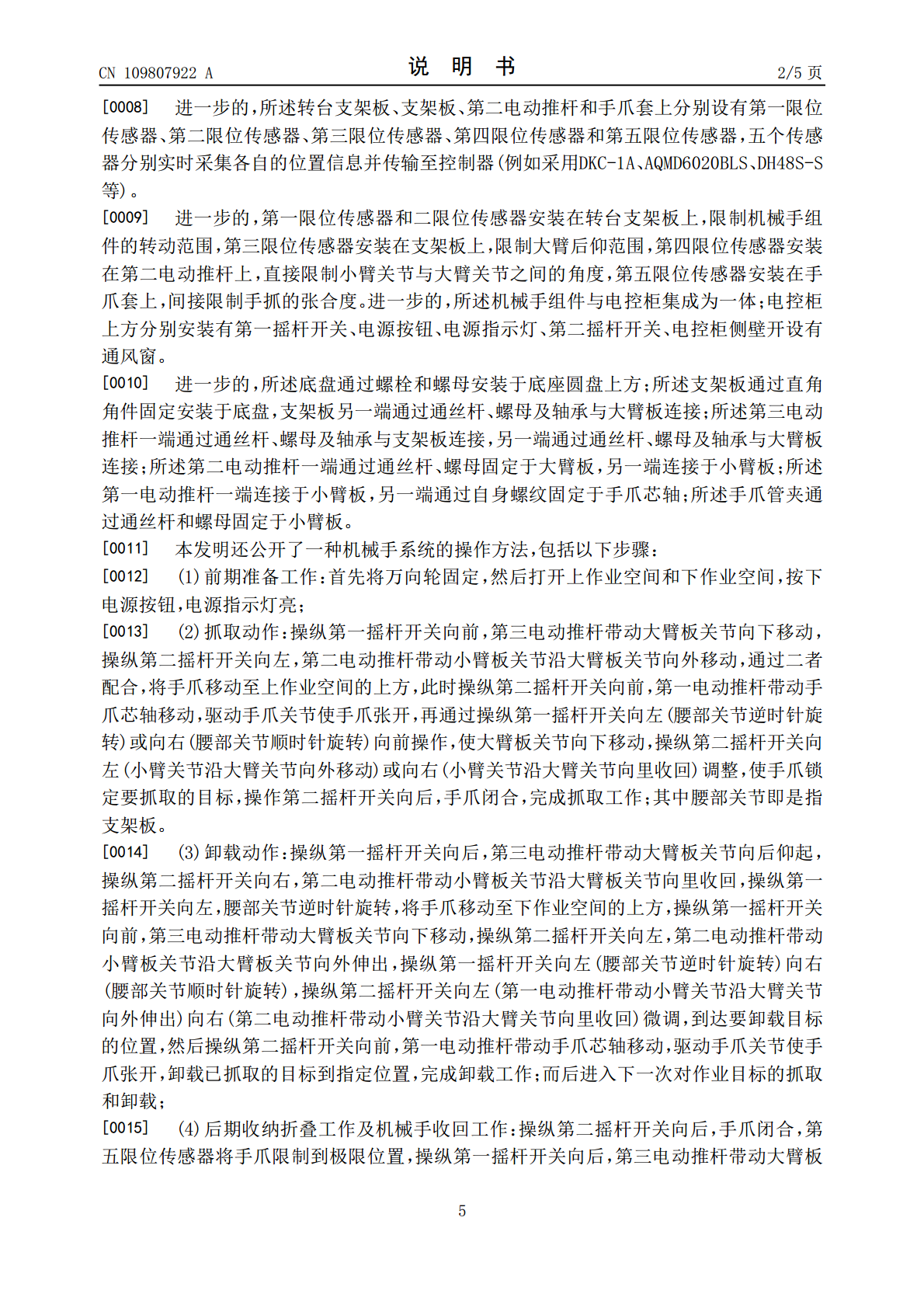
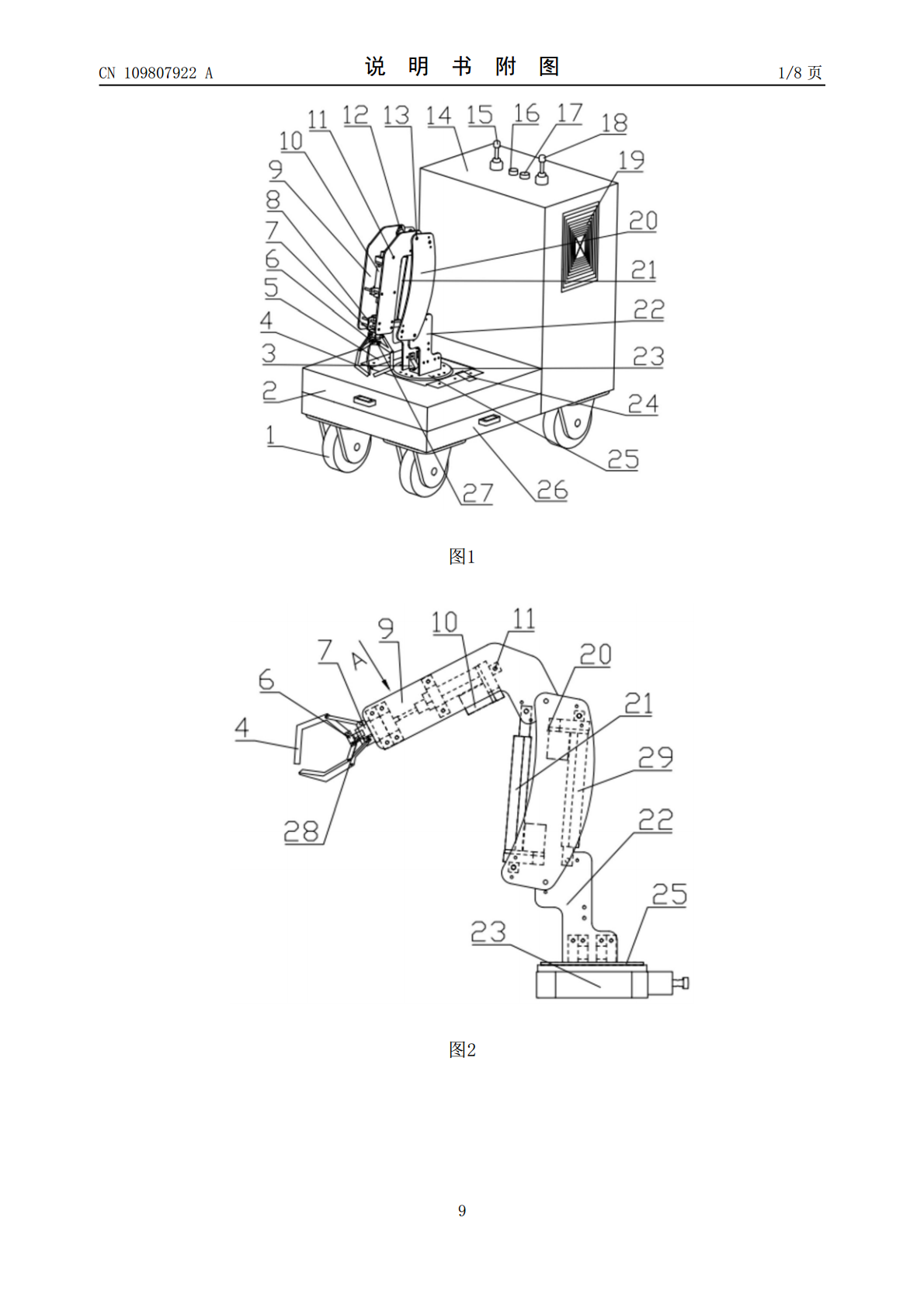
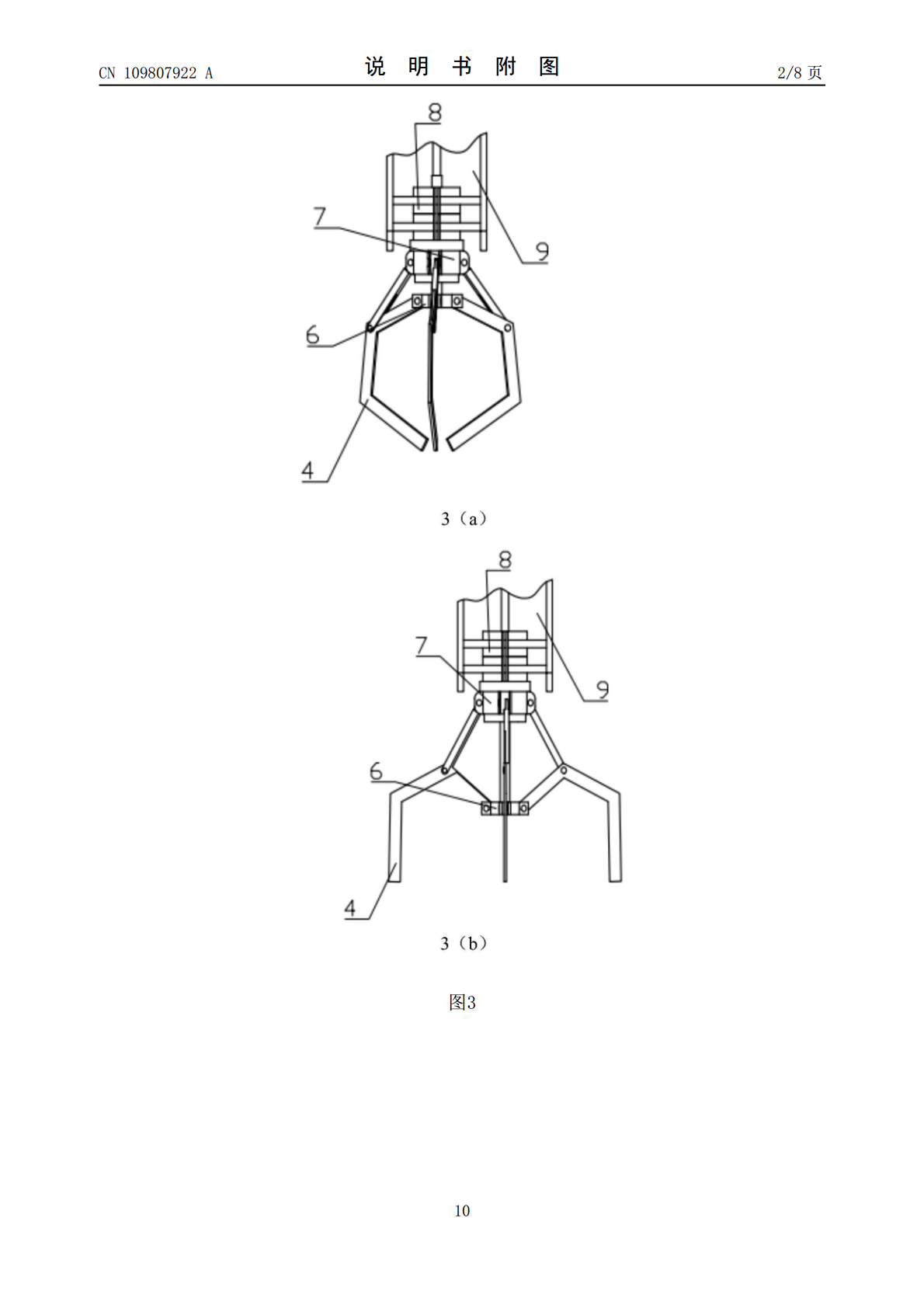
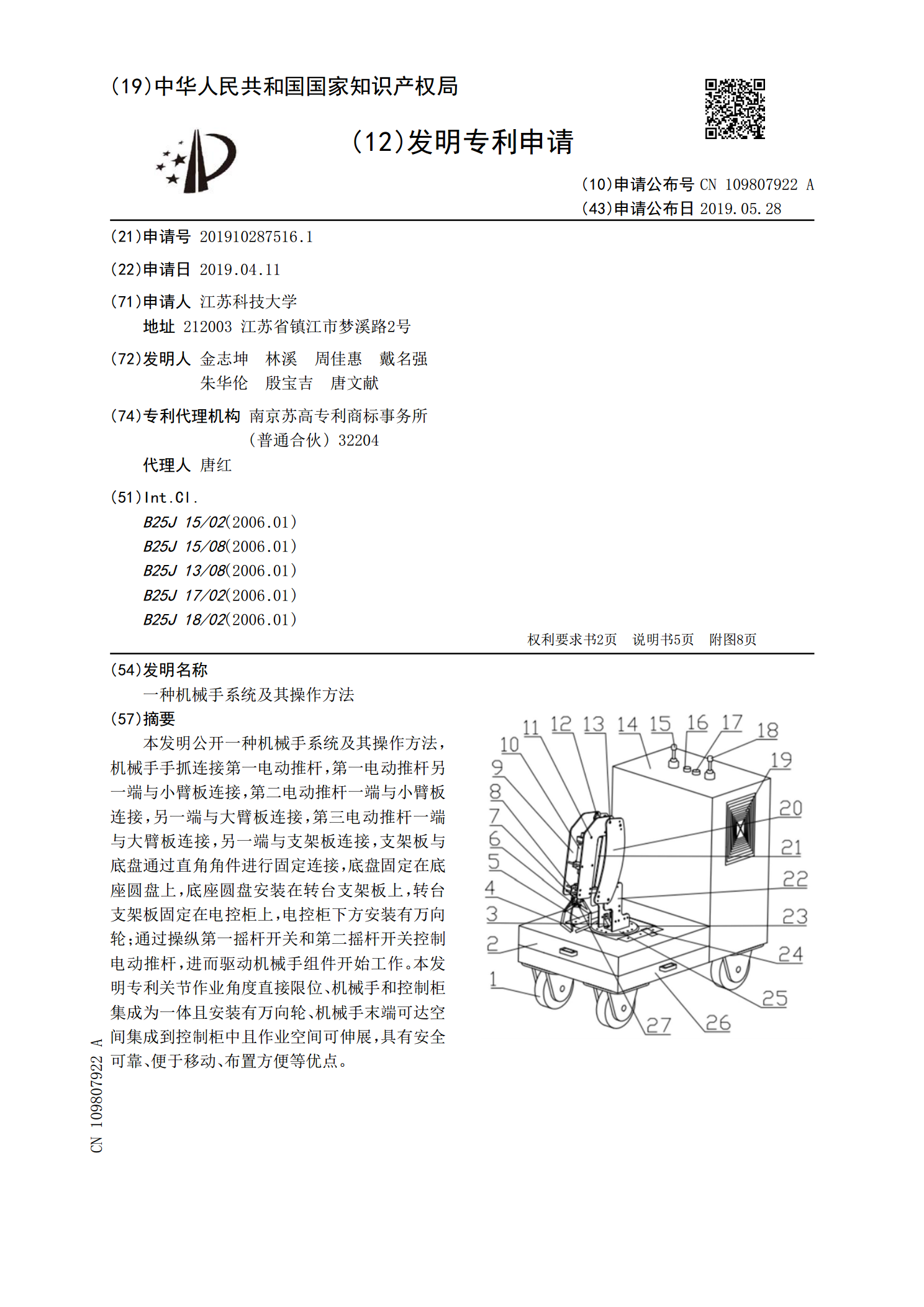
本发明公开一种机械手系统及其操作方法,机械手手抓连接第一电动推杆,第一电动推杆另一端与小臂板连接,第二电动推杆一端与小臂板连接,另一端与大臂板连接,第三电动推杆一端与大臂板连接,另一端与支架板连接,支架板与底盘通过直角角件进行固定连接,底盘固定在底座圆盘上,底座圆盘安装在转台支架板上,转台支架板固定在电控柜上,电控柜下方安装有万向轮;通过操纵第一摇杆开关和第二摇杆开关控制电动推杆,进而驱动机械手组件开始工作。本发明专利关节作业角度直接限位、机械手和控制柜集成为一体且安装有万向轮、机械手末端可达空间集成到控
一种工业机械手及其操作方法.pdf
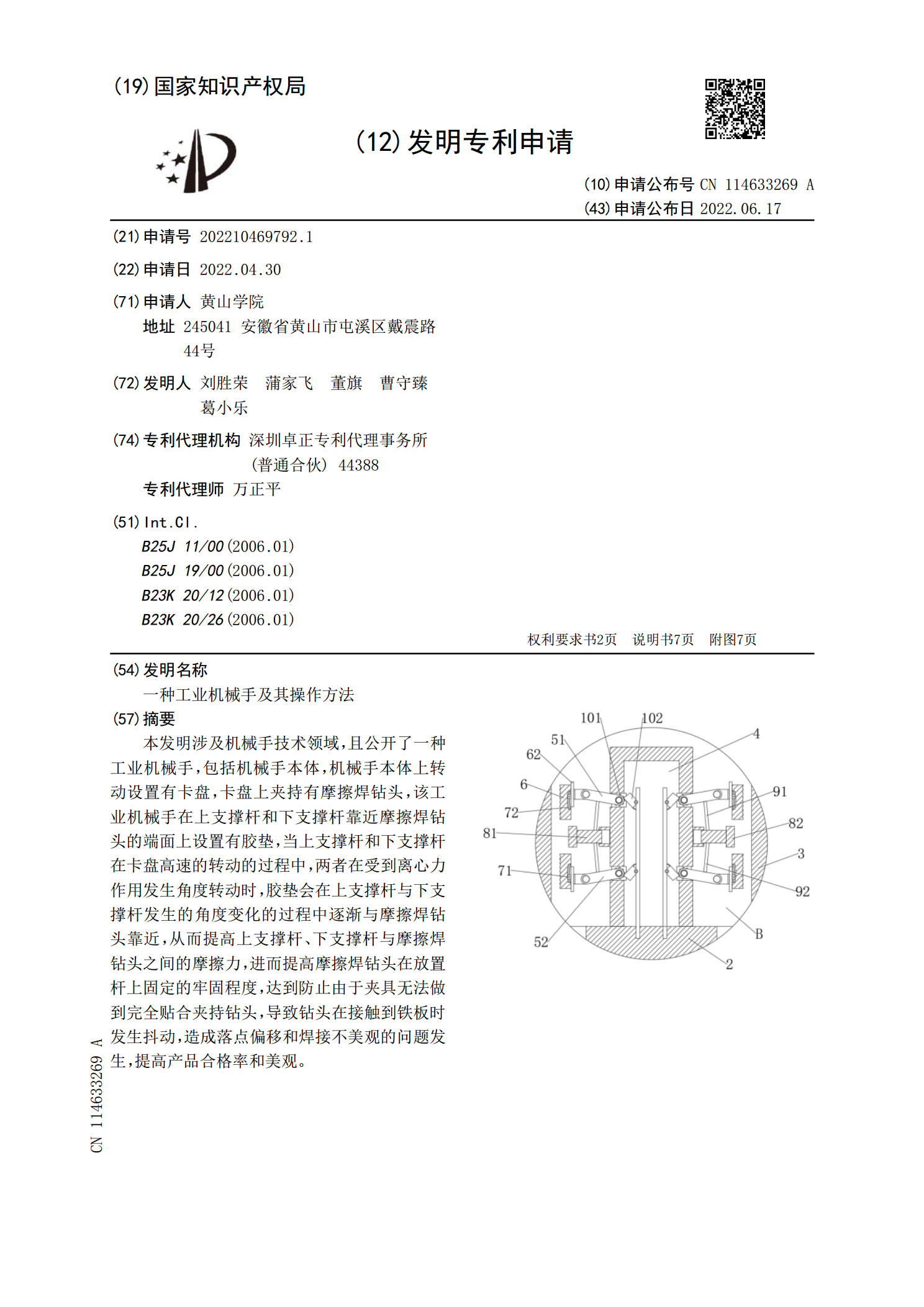
本发明涉及机械手技术领域,且公开了一种工业机械手,包括机械手本体,机械手本体上转动设置有卡盘,卡盘上夹持有摩擦焊钻头,该工业机械手在上支撑杆和下支撑杆靠近摩擦焊钻头的端面上设置有胶垫,当上支撑杆和下支撑杆在卡盘高速的转动的过程中,两者在受到离心力作用发生角度转动时,胶垫会在上支撑杆与下支撑杆发生的角度变化的过程中逐渐与摩擦焊钻头靠近,从而提高上支撑杆、下支撑杆与摩擦焊钻头之间的摩擦力,进而提高摩擦焊钻头在放置杆上固定的牢固程度,达到防止由于夹具无法做到完全贴合夹持钻头,导致钻头在接触到铁板时发生抖动,造成
一种航空控制盒操作机械手及其操作方法.pdf
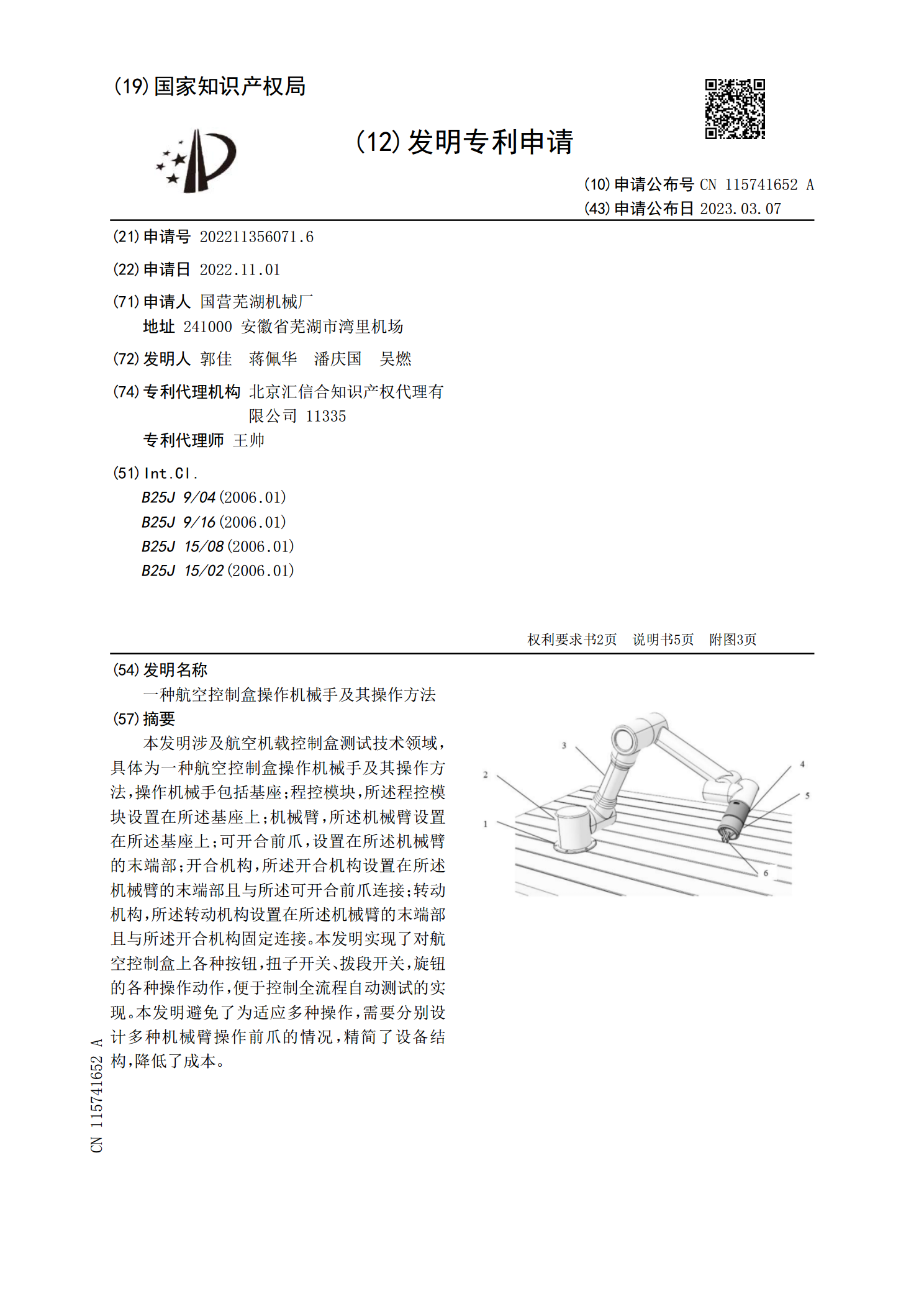
本发明涉及航空机载控制盒测试技术领域,具体为一种航空控制盒操作机械手及其操作方法,操作机械手包括基座;程控模块,所述程控模块设置在所述基座上;机械臂,所述机械臂设置在所述基座上;可开合前爪,设置在所述机械臂的末端部;开合机构,所述开合机构设置在所述机械臂的末端部且与所述可开合前爪连接;转动机构,所述转动机构设置在所述机械臂的末端部且与所述开合机构固定连接。本发明实现了对航空控制盒上各种按钮,扭子开关、拨段开关,旋钮的各种操作动作,便于控制全流程自动测试的实现。本发明避免了为适应多种操作,需要分别设计多种机
一种移动式机械手组件及其操作方法.pdf
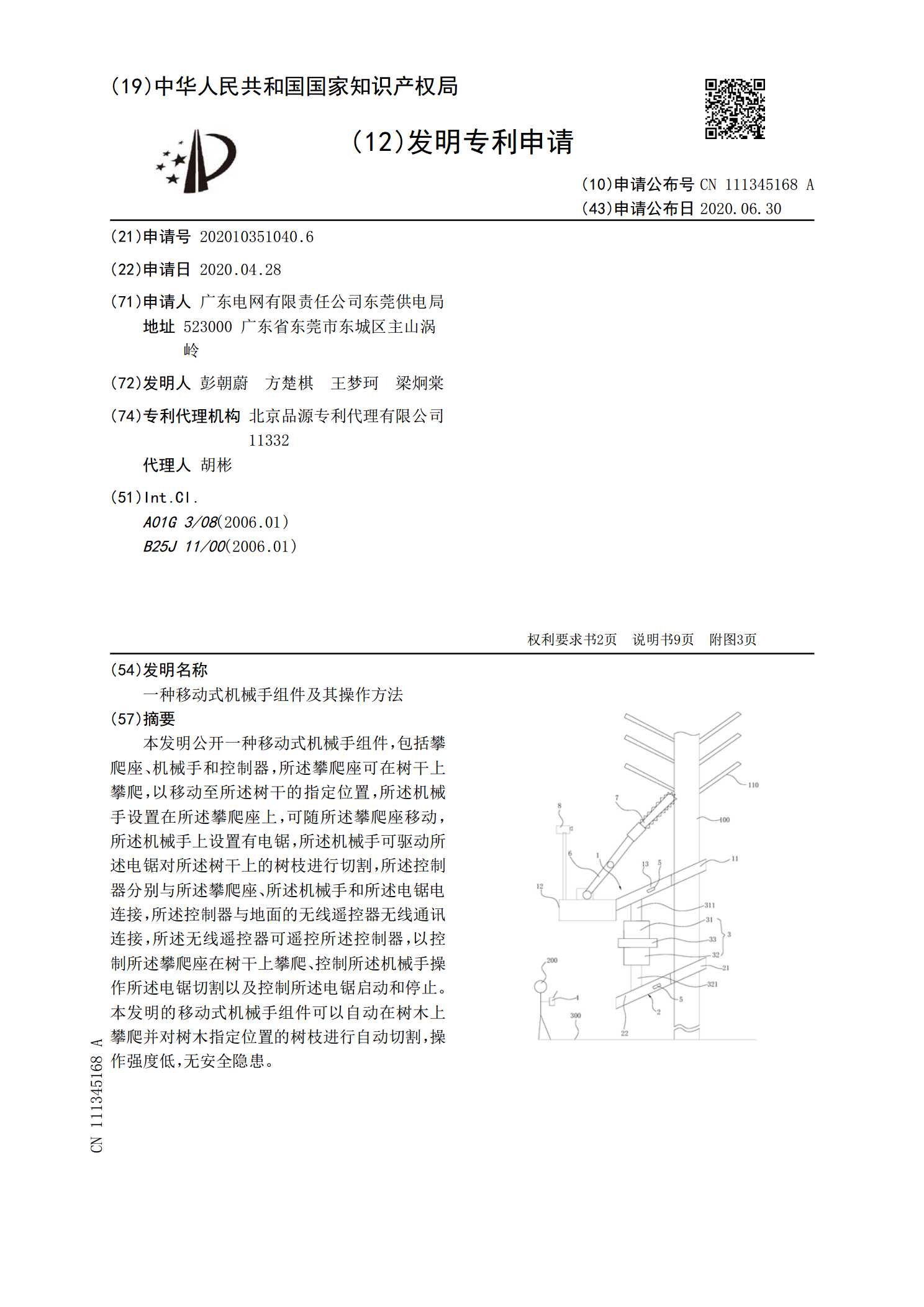
本发明公开一种移动式机械手组件,包括攀爬座、机械手和控制器,所述攀爬座可在树干上攀爬,以移动至所述树干的指定位置,所述机械手设置在所述攀爬座上,可随所述攀爬座移动,所述机械手上设置有电锯,所述机械手可驱动所述电锯对所述树干上的树枝进行切割,所述控制器分别与所述攀爬座、所述机械手和所述电锯电连接,所述控制器与地面的无线遥控器无线通讯连接,所述无线遥控器可遥控所述控制器,以控制所述攀爬座在树干上攀爬、控制所述机械手操作所述电锯切割以及控制所述电锯启动和停止。本发明的移动式机械手组件可以自动在树木上攀爬并对树木
一种双行程伸缩机械手臂装置及其操作方法.pdf
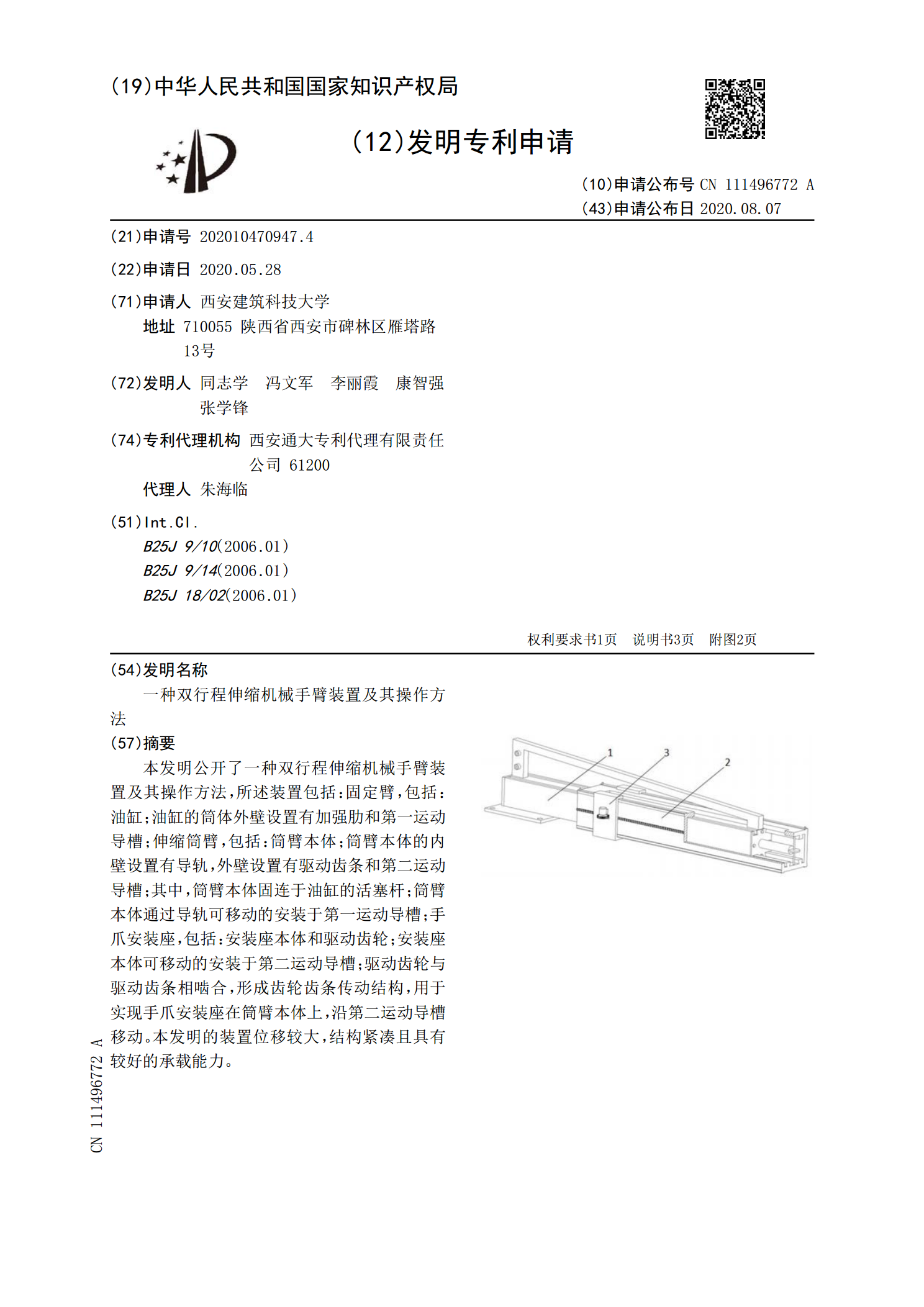
本发明公开了一种双行程伸缩机械手臂装置及其操作方法,所述装置包括:固定臂,包括:油缸;油缸的筒体外壁设置有加强肋和第一运动导槽;伸缩筒臂,包括:筒臂本体;筒臂本体的内壁设置有导轨,外壁设置有驱动齿条和第二运动导槽;其中,筒臂本体固连于油缸的活塞杆;筒臂本体通过导轨可移动的安装于第一运动导槽;手爪安装座,包括:安装座本体和驱动齿轮;安装座本体可移动的安装于第二运动导槽;驱动齿轮与驱动齿条相啮合,形成齿轮齿条传动结构,用于实现手爪安装座在筒臂本体上,沿第二运动导槽移动。本发明的装置位移较大,结构紧凑且具有较好