
一种长距离龙门激光测距移动机构.pdf

书生****22


1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种长距离龙门激光测距移动机构.pdf
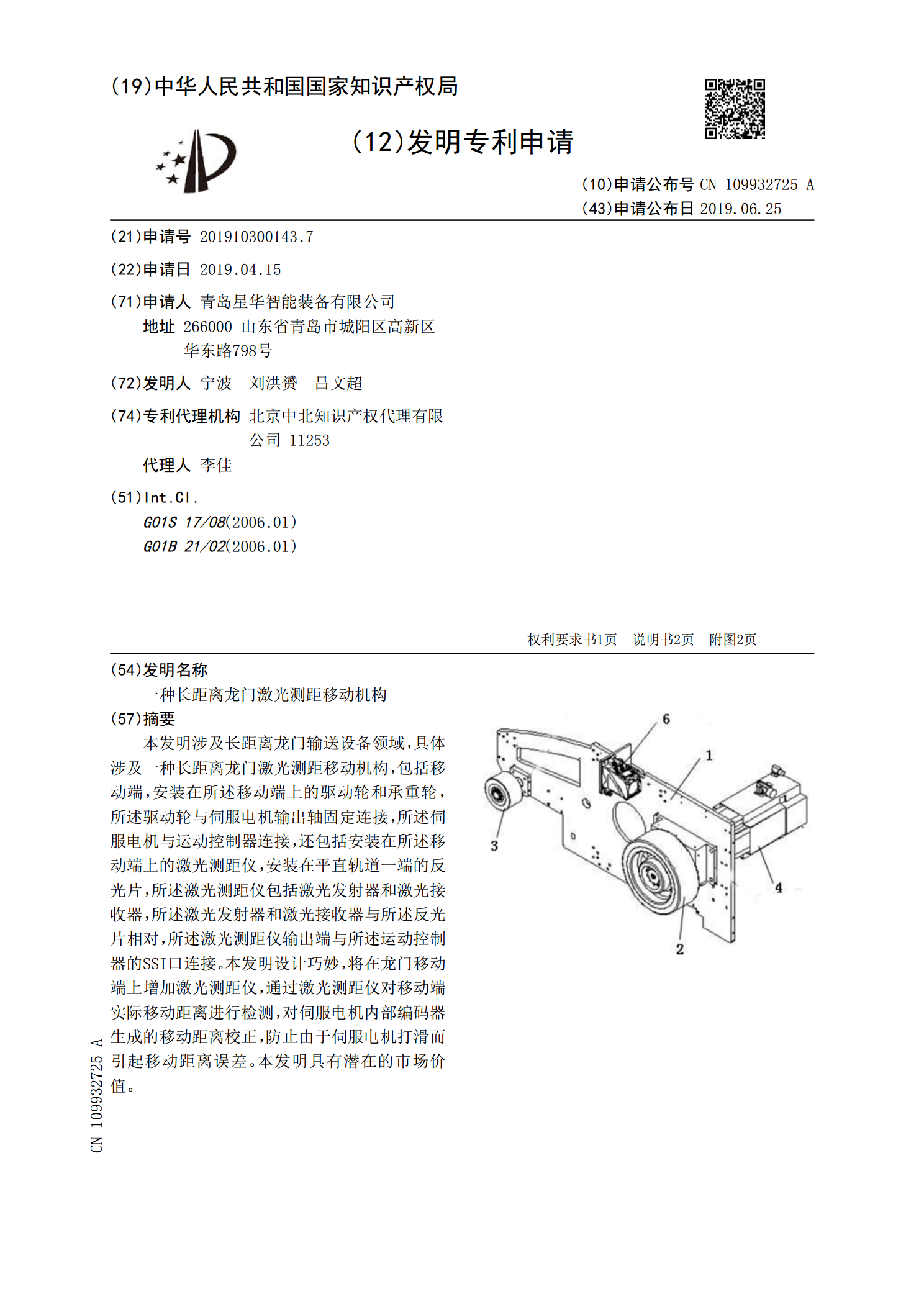
本发明涉及长距离龙门输送设备领域,具体涉及一种长距离龙门激光测距移动机构,包括移动端,安装在所述移动端上的驱动轮和承重轮,所述驱动轮与伺服电机输出轴固定连接,所述伺服电机与运动控制器连接,还包括安装在所述移动端上的激光测距仪,安装在平直轨道一端的反光片,所述激光测距仪包括激光发射器和激光接收器,所述激光发射器和激光接收器与所述反光片相对,所述激光测距仪输出端与所述运动控制器的SSI口连接。本发明设计巧妙,将在龙门移动端上增加激光测距仪,通过激光测距仪对移动端实际移动距离进行检测,对伺服电机内部编码器生成的

一种激光测距手机及激光测距方法.pdf
本发明提供了一种激光测距手机,包括手机主体和摄像头模块,还包括设置在所述手机主体上的激光测距模块,所述激光测距模块包括激光发射接收单元和可见光激光指示单元,所述激光测距模块和所述摄像头模块通过内部电路与手机主板连接,所述激光测距模块根据发射和接收激光的信号差异计算所述激光测距手机与待测物体之间的距离,并能够将测量结果显示在手机屏幕上。本发明还提供了一种利用该激光测距手机测量距离的方法。本发明将激光测距应用到手机上,无需额外购买即可随时使用,方便快捷,采用非可见光激光和可见光激光配合测距,测距范围广,可靠性

基于高频激光长距离测距系统电路的研究的中期报告.docx
基于高频激光长距离测距系统电路的研究的中期报告第一部分:引言高精度、高速度、长距离测距已经成为当今科学研究和工业应用领域中不可或缺的重要技术之一。近年来,随着激光技术的迅速发展,基于激光的测距技术得到越来越广泛的应用。在这些技术中,基于高频激光长距离测距系统因其高精度、高速度、长距离测距等特点受到越来越多的关注。本中期报告主要介绍本课题研究的基于高频激光长距离测距系统电路的研究进展情况,具体内容如下。第二部分:研究背景和意义现代科学技术和工业应用对高精度、高速度、长距离测距的需求越来越大,这促进了激光测距
一种龙门移动驱动机构.pdf
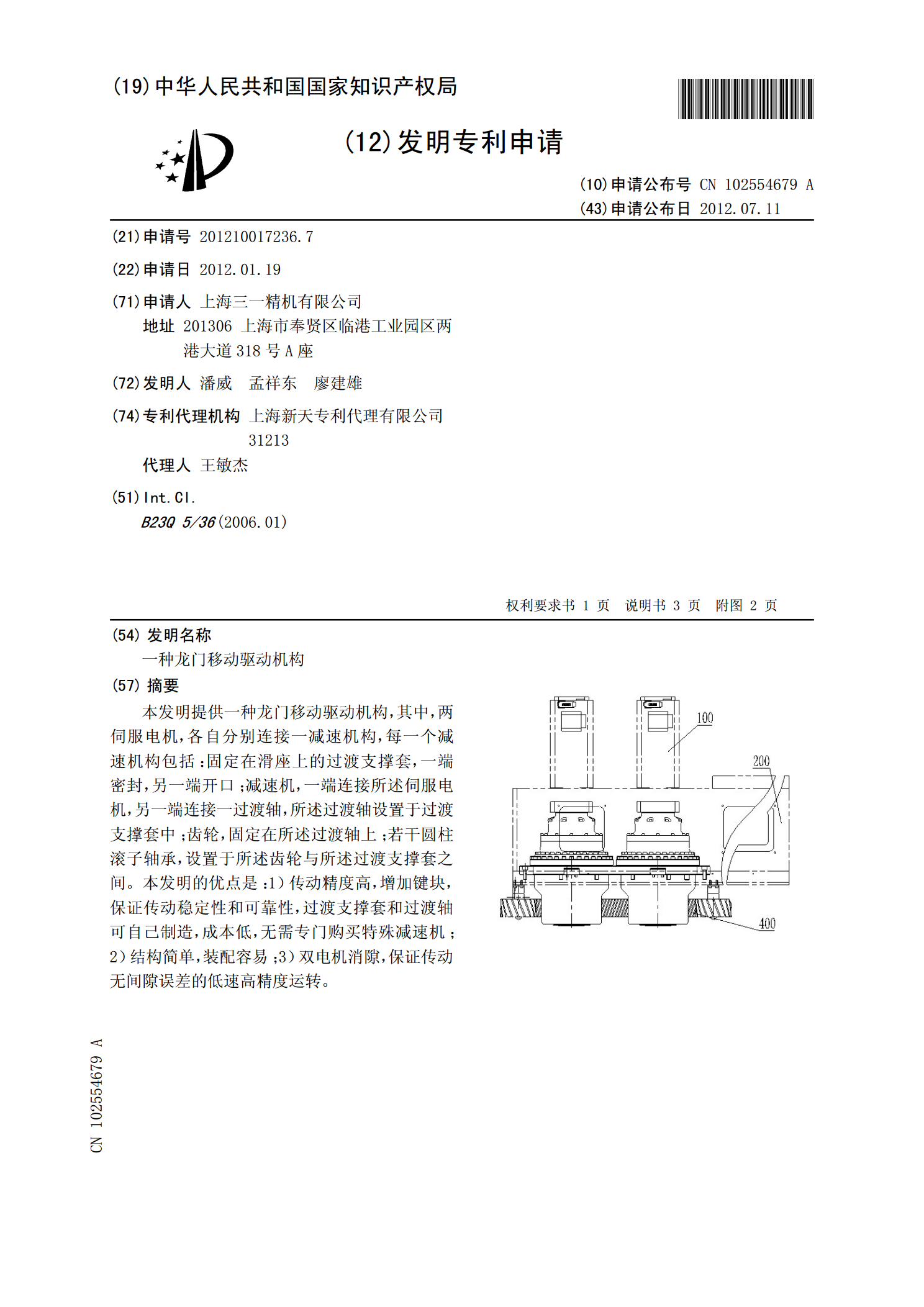
本发明提供一种龙门移动驱动机构,其中,两伺服电机,各自分别连接一减速机构,每一个减速机构包括:固定在滑座上的过渡支撑套,一端密封,另一端开口;减速机,一端连接所述伺服电机,另一端连接一过渡轴,所述过渡轴设置于过渡支撑套中;齿轮,固定在所述过渡轴上;若干圆柱滚子轴承,设置于所述齿轮与所述过渡支撑套之间。本发明的优点是:1)传动精度高,增加键块,保证传动稳定性和可靠性,过渡支撑套和过渡轴可自己制造,成本低,无需专门购买特殊减速机;2)结构简单,装配容易;3)双电机消隙,保证传动无间隙误差的低速高精度运转。
一种激光测距的方法和激光测距装置.pdf
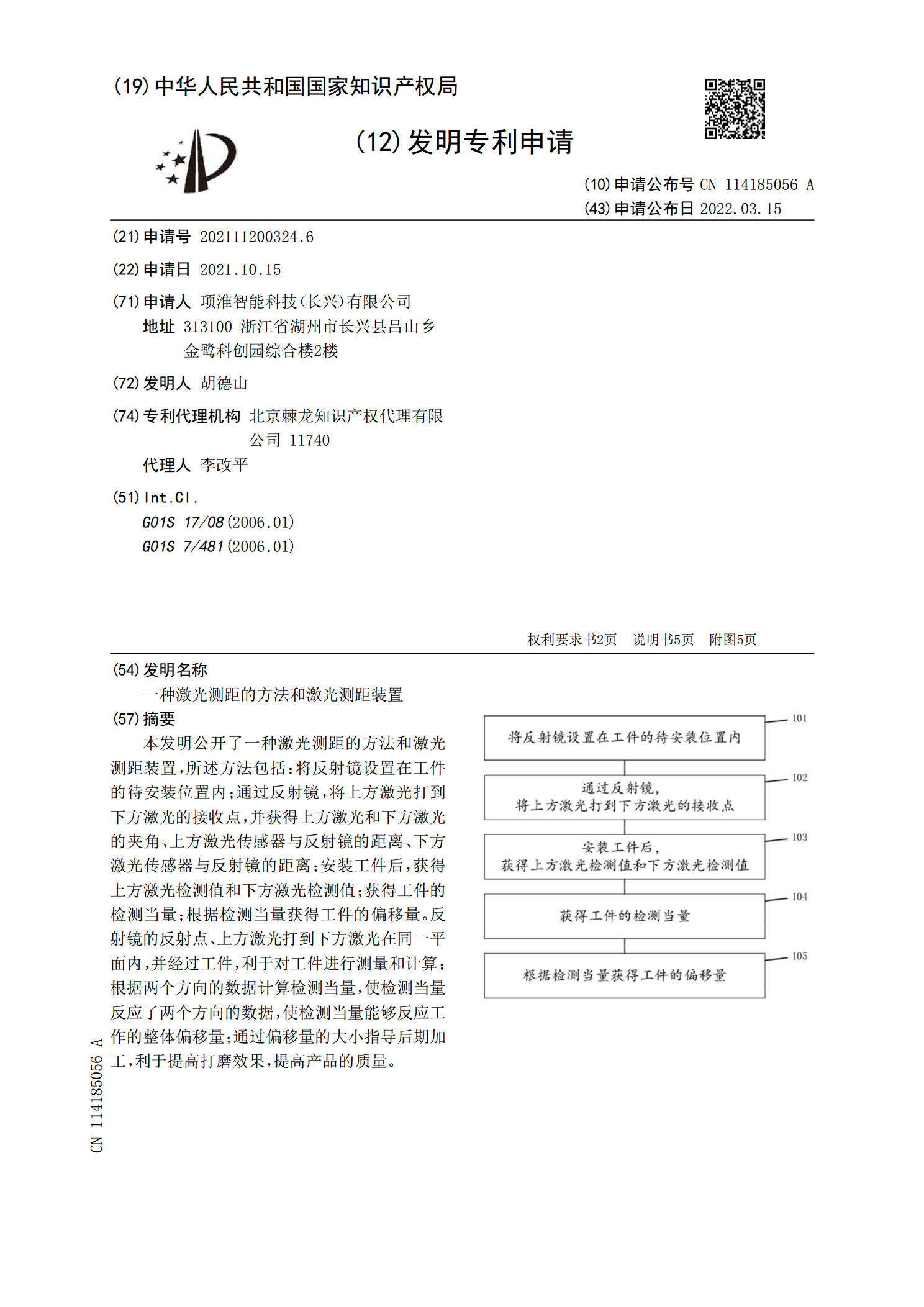
本发明公开了一种激光测距的方法和激光测距装置,所述方法包括:将反射镜设置在工件的待安装位置内;通过反射镜,将上方激光打到下方激光的接收点,并获得上方激光和下方激光的夹角、上方激光传感器与反射镜的距离、下方激光传感器与反射镜的距离;安装工件后,获得上方激光检测值和下方激光检测值;获得工件的检测当量;根据检测当量获得工件的偏移量。反射镜的反射点、上方激光打到下方激光在同一平面内,并经过工件,利于对工件进行测量和计算;根据两个方向的数据计算检测当量,使检测当量反应了两个方向的数据,使检测当量能够反应工作的整体偏