
显微图像标定方法、装置、终端和介质.pdf

高格****gu

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
显微图像标定方法、装置、终端和介质.pdf
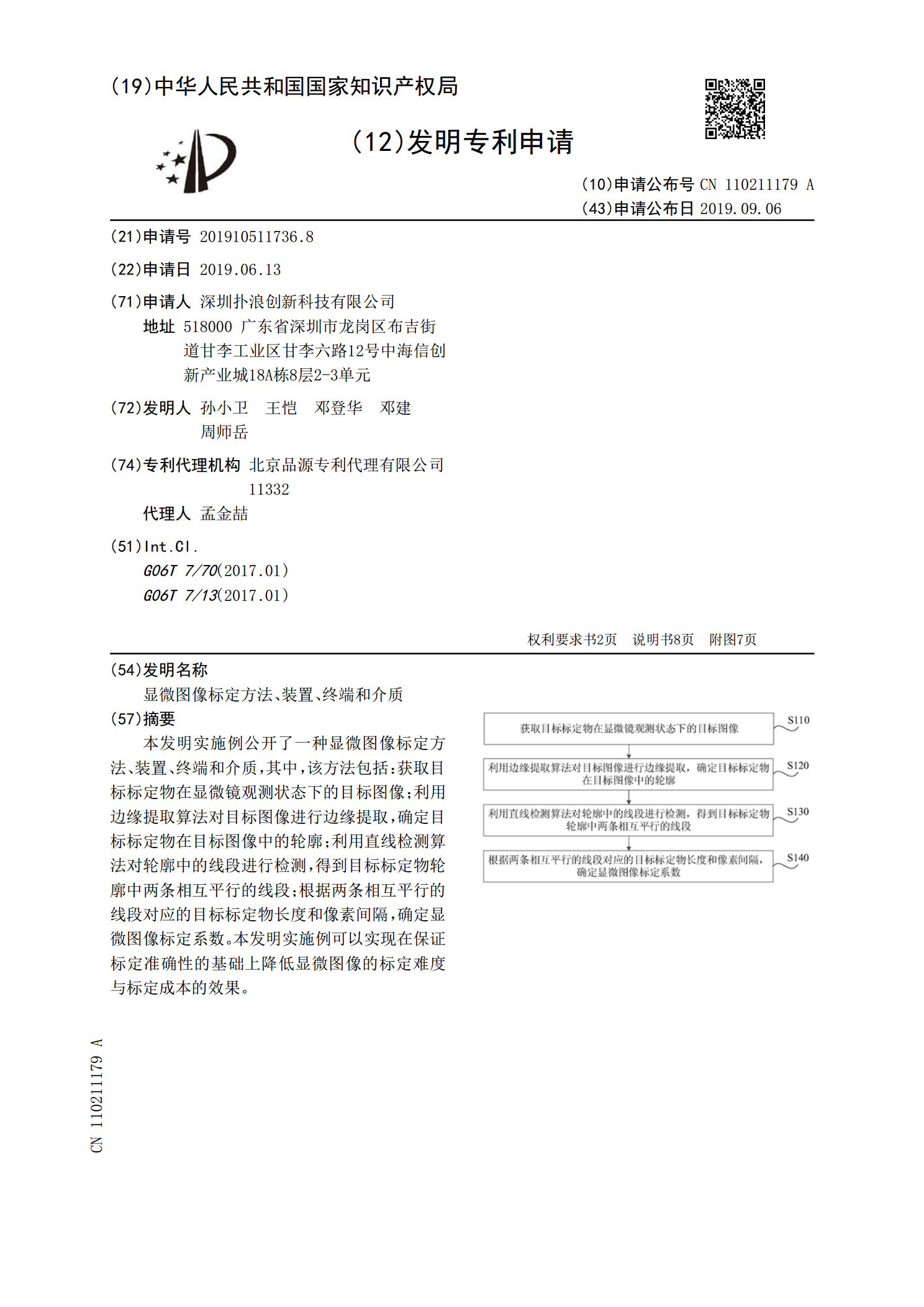
本发明实施例公开了一种显微图像标定方法、装置、终端和介质,其中,该方法包括:获取目标标定物在显微镜观测状态下的目标图像;利用边缘提取算法对目标图像进行边缘提取,确定目标标定物在目标图像中的轮廓;利用直线检测算法对轮廓中的线段进行检测,得到目标标定物轮廓中两条相互平行的线段;根据两条相互平行的线段对应的目标标定物长度和像素间隔,确定显微图像标定系数。本发明实施例可以实现在保证标定准确性的基础上降低显微图像的标定难度与标定成本的效果。
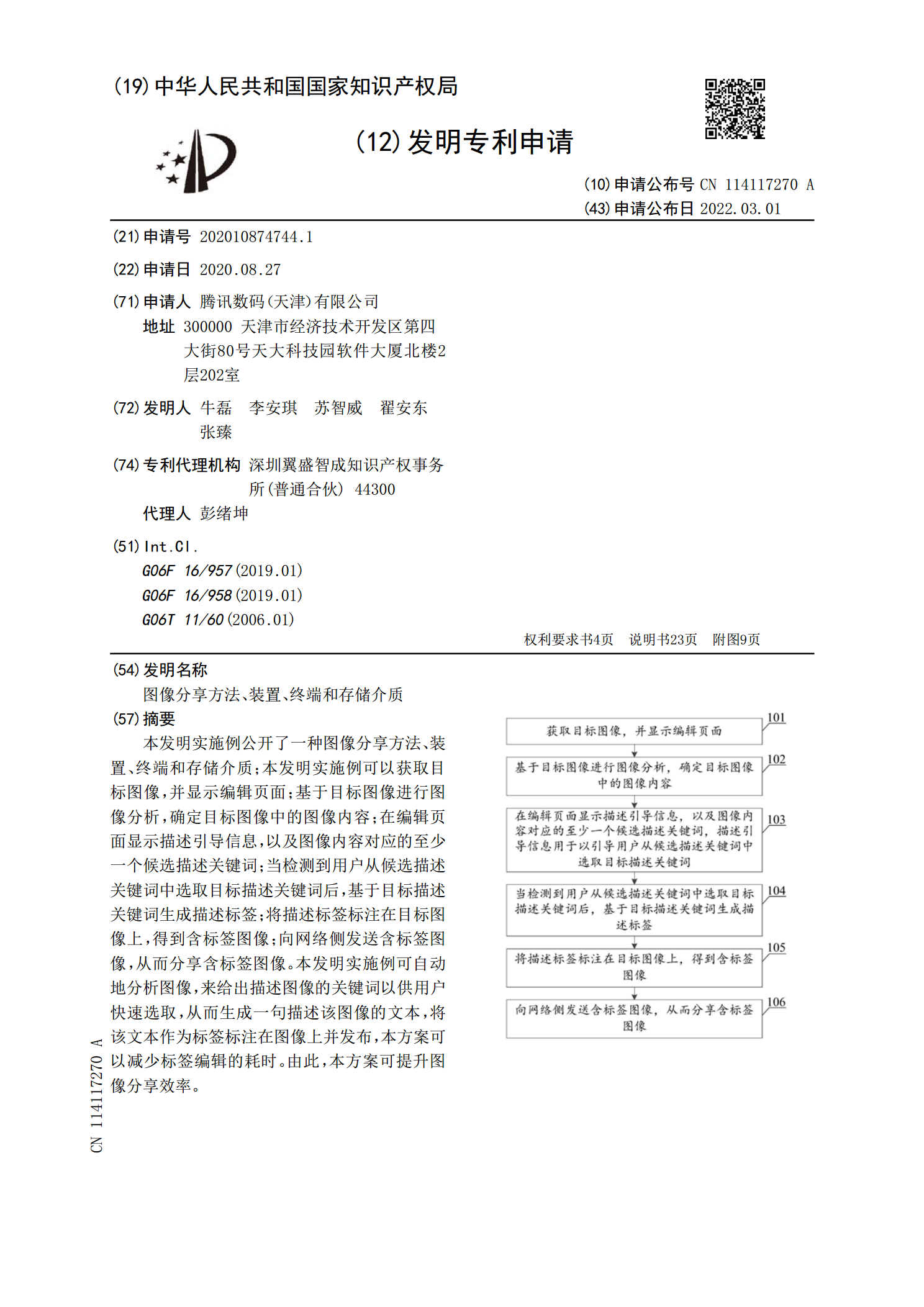
图像分享方法、装置、终端和存储介质.pdf
本发明实施例公开了一种图像分享方法、装置、终端和存储介质;本发明实施例可以获取目标图像,并显示编辑页面;基于目标图像进行图像分析,确定目标图像中的图像内容;在编辑页面显示描述引导信息,以及图像内容对应的至少一个候选描述关键词;当检测到用户从候选描述关键词中选取目标描述关键词后,基于目标描述关键词生成描述标签;将描述标签标注在目标图像上,得到含标签图像;向网络侧发送含标签图像,从而分享含标签图像。本发明实施例可自动地分析图像,来给出描述图像的关键词以供用户快速选取,从而生成一句描述该图像的文本,将该文本作为
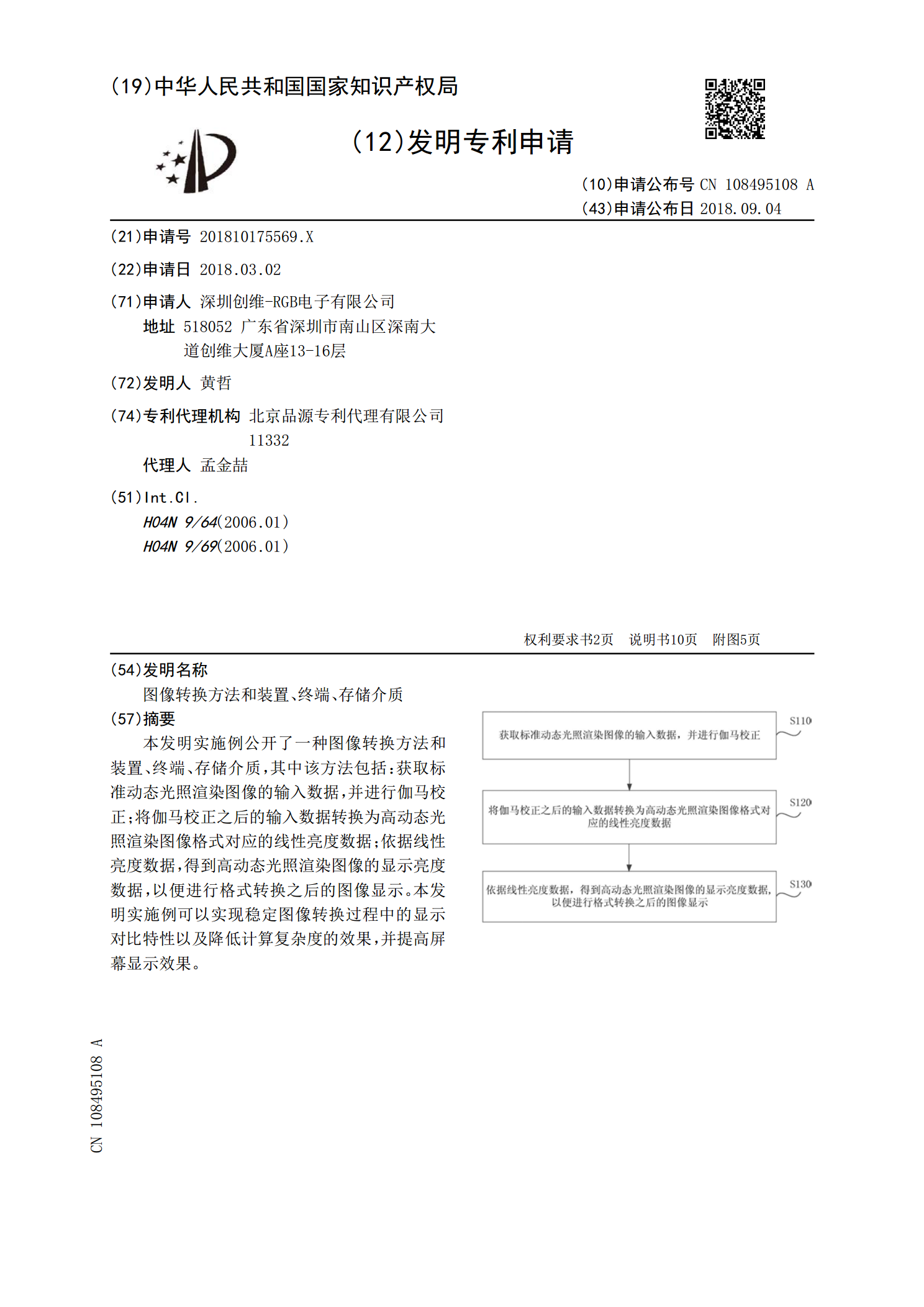
图像转换方法和装置、终端、存储介质.pdf
本发明实施例公开了一种图像转换方法和装置、终端、存储介质,其中该方法包括:获取标准动态光照渲染图像的输入数据,并进行伽马校正;将伽马校正之后的输入数据转换为高动态光照渲染图像格式对应的线性亮度数据;依据线性亮度数据,得到高动态光照渲染图像的显示亮度数据,以便进行格式转换之后的图像显示。本发明实施例可以实现稳定图像转换过程中的显示对比特性以及降低计算复杂度的效果,并提高屏幕显示效果。
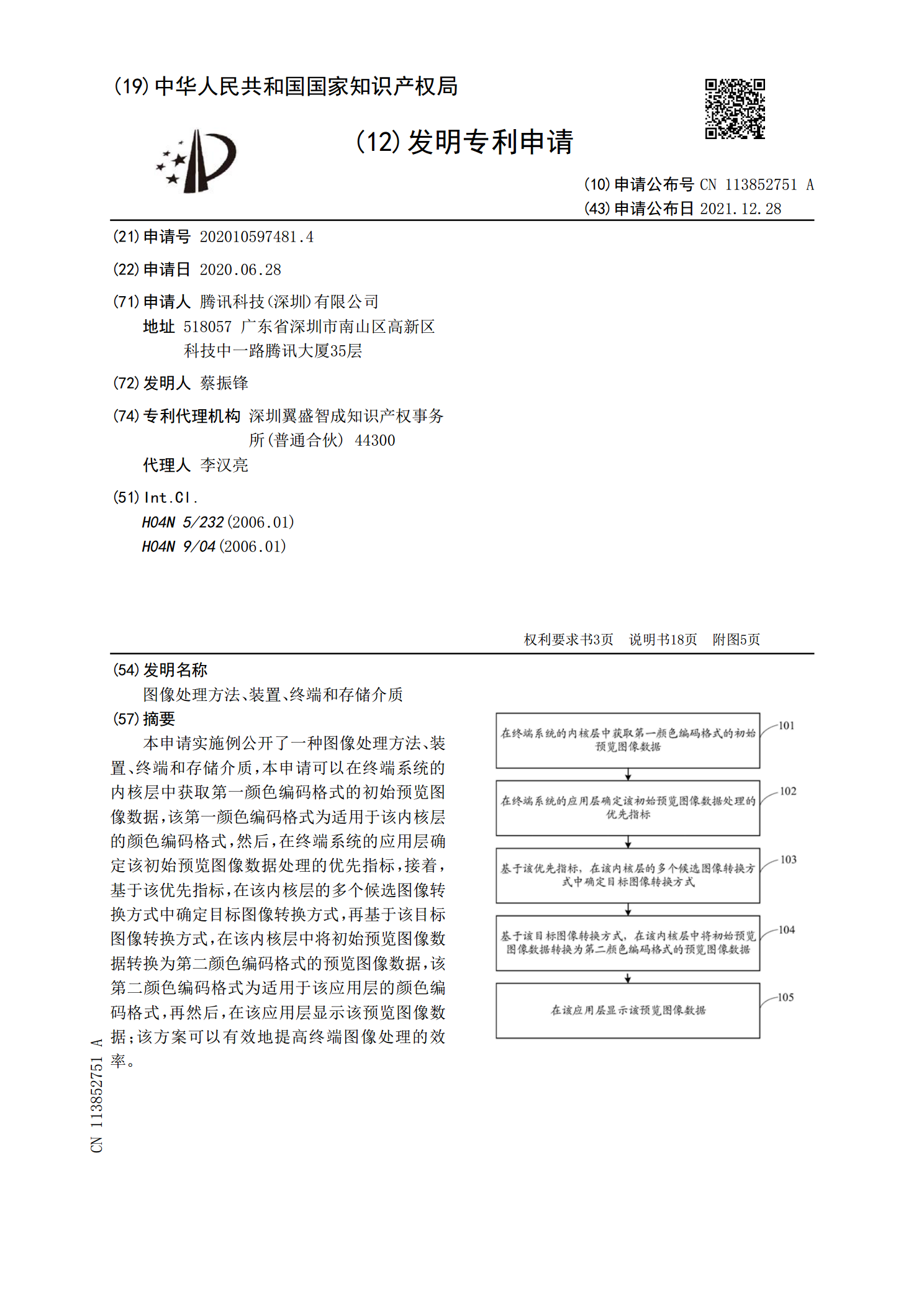
图像处理方法、装置、终端和存储介质.pdf
本申请实施例公开了一种图像处理方法、装置、终端和存储介质,本申请可以在终端系统的内核层中获取第一颜色编码格式的初始预览图像数据,该第一颜色编码格式为适用于该内核层的颜色编码格式,然后,在终端系统的应用层确定该初始预览图像数据处理的优先指标,接着,基于该优先指标,在该内核层的多个候选图像转换方式中确定目标图像转换方式,再基于该目标图像转换方式,在该内核层中将初始预览图像数据转换为第二颜色编码格式的预览图像数据,该第二颜色编码格式为适用于该应用层的颜色编码格式,再然后,在该应用层显示该预览图像数据;该方案可以
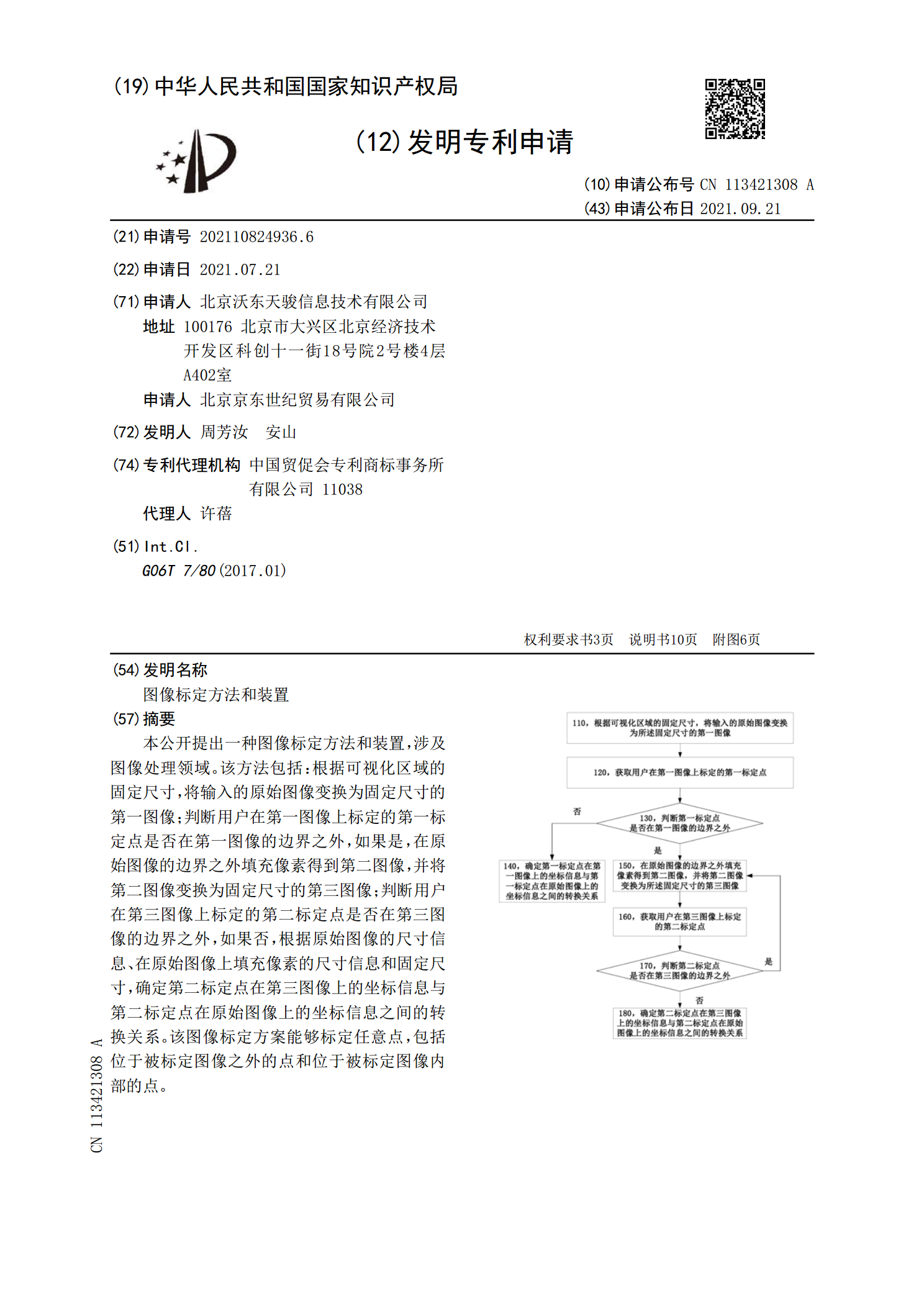
图像标定方法和装置.pdf
本公开提出一种图像标定方法和装置,涉及图像处理领域。该方法包括:根据可视化区域的固定尺寸,将输入的原始图像变换为固定尺寸的第一图像;判断用户在第一图像上标定的第一标定点是否在第一图像的边界之外,如果是,在原始图像的边界之外填充像素得到第二图像,并将第二图像变换为固定尺寸的第三图像;判断用户在第三图像上标定的第二标定点是否在第三图像的边界之外,如果否,根据原始图像的尺寸信息、在原始图像上填充像素的尺寸信息和固定尺寸,确定第二标定点在第三图像上的坐标信息与第二标定点在原始图像上的坐标信息之间的转换关系。该图像