
一种物流货架搬运机器人及物流货架搬运方法.pdf

是你****馨呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种物流货架搬运机器人及物流货架搬运方法.pdf
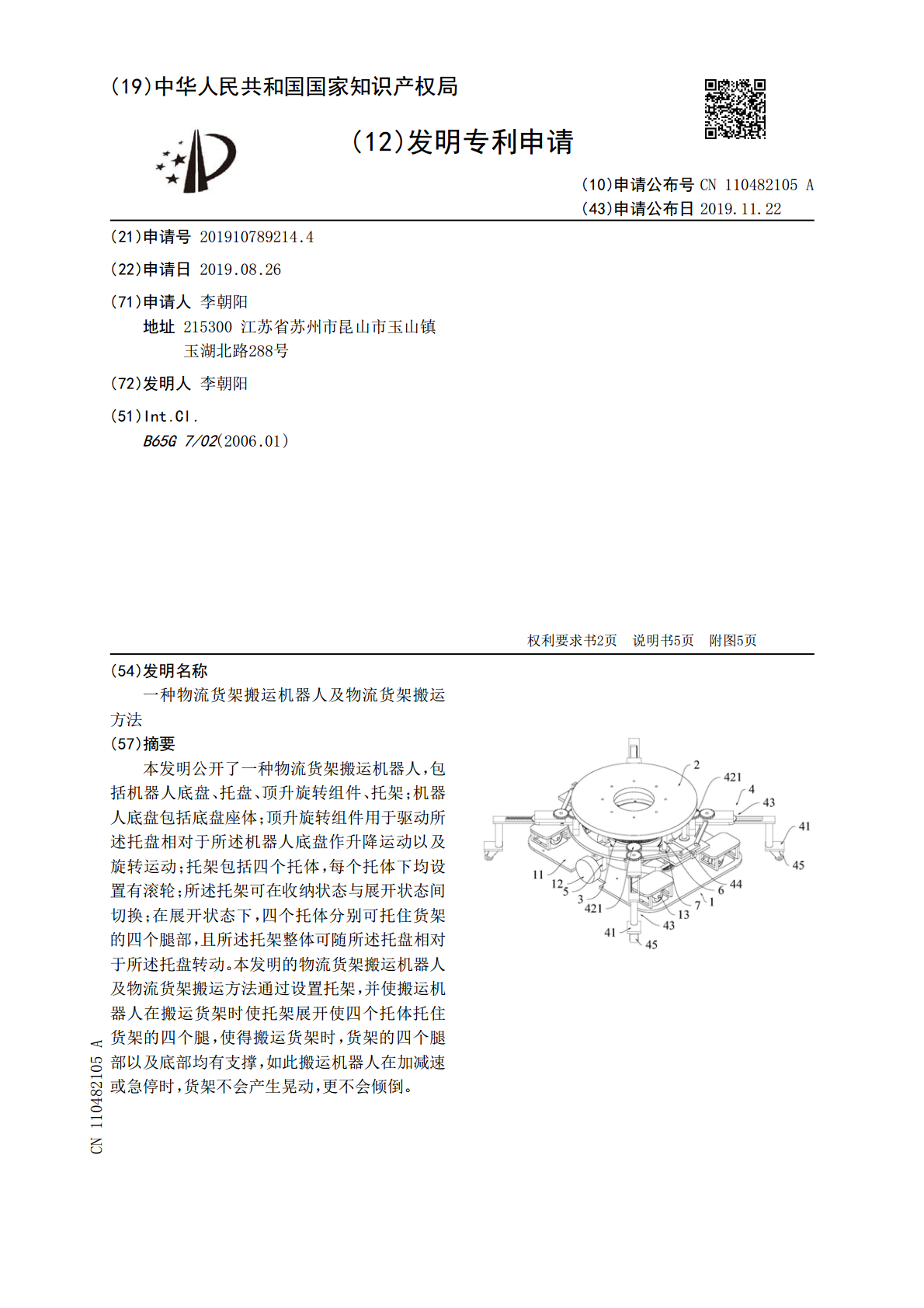
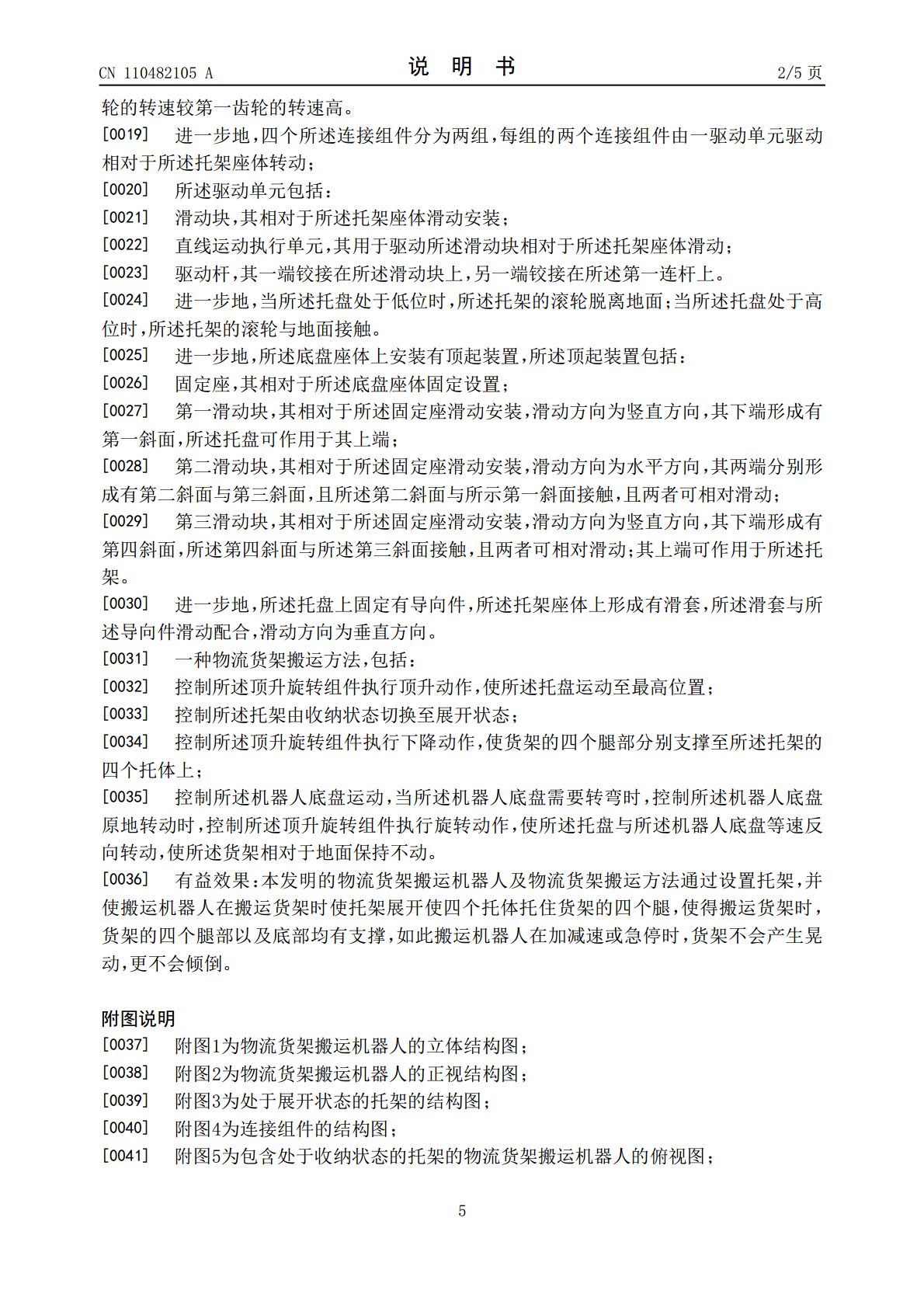
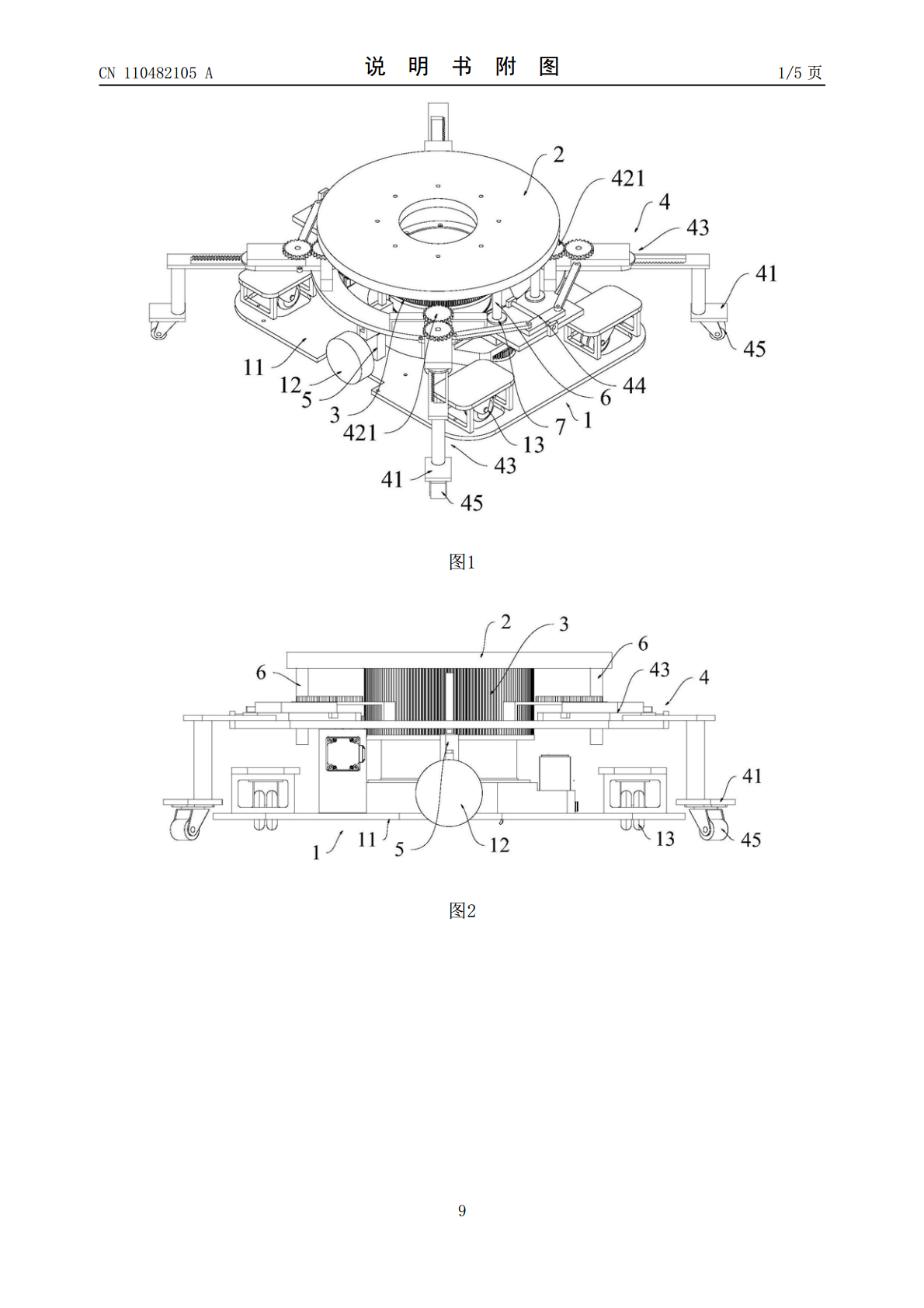
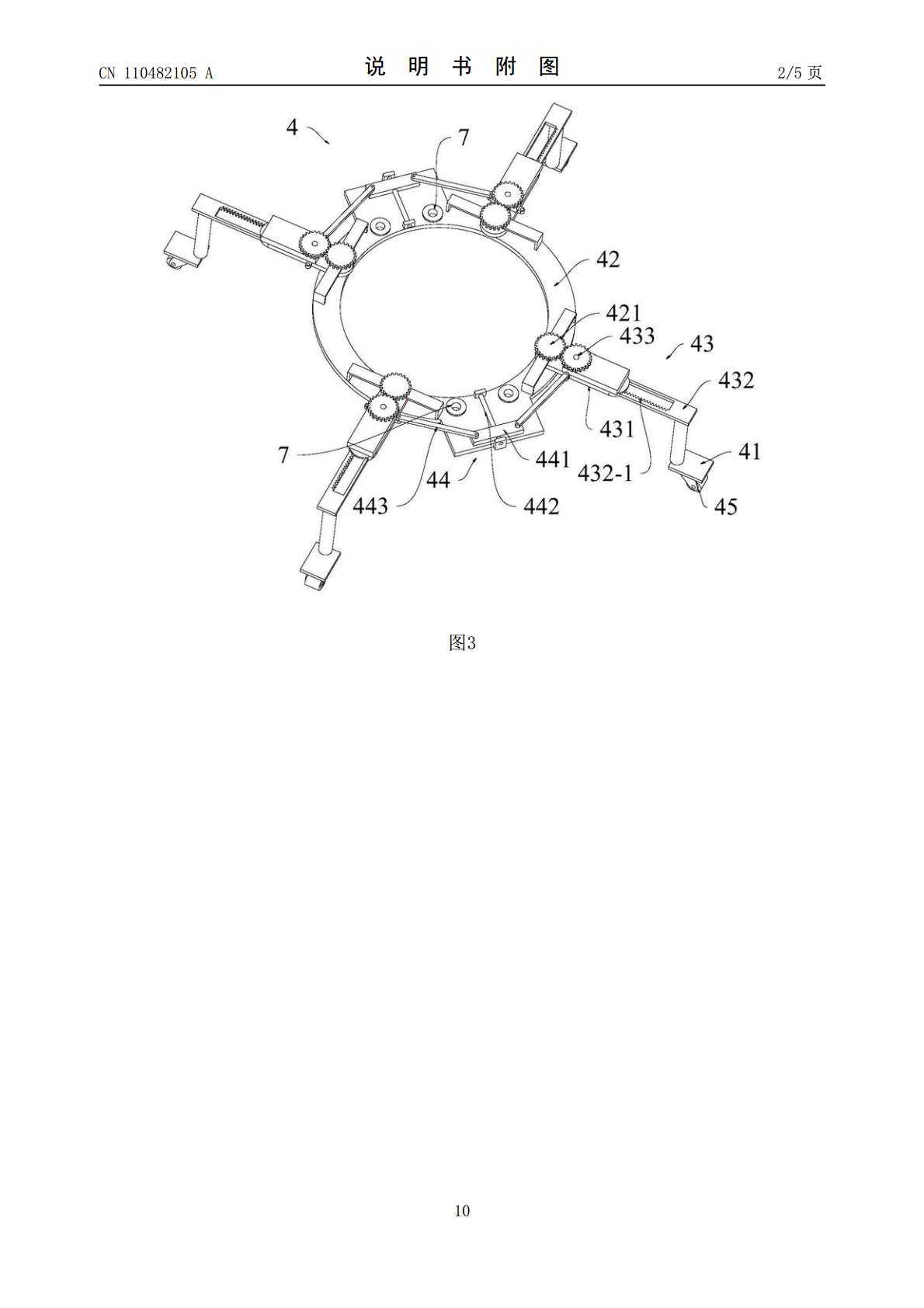
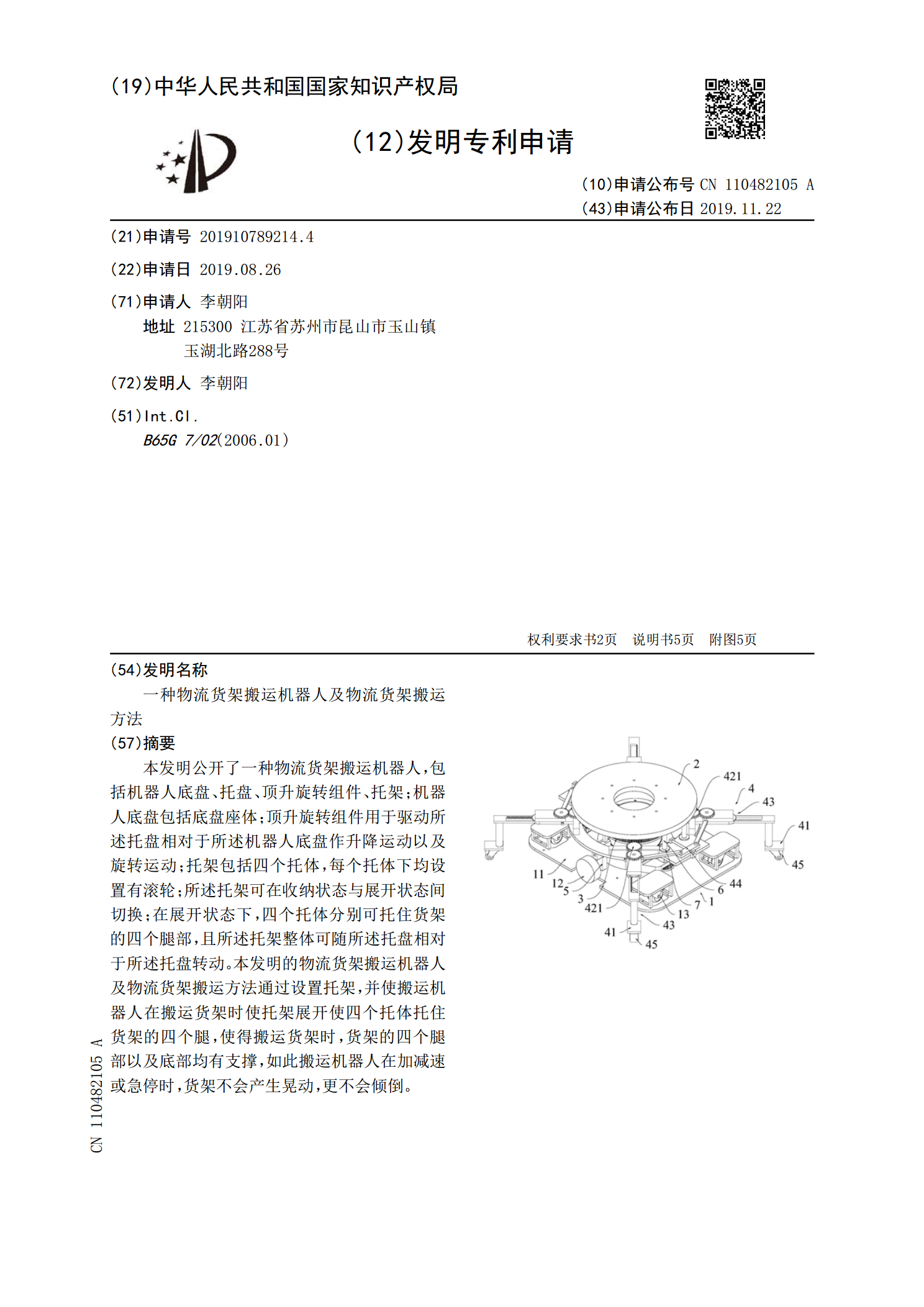
本发明公开了一种物流货架搬运机器人,包括机器人底盘、托盘、顶升旋转组件、托架;机器人底盘包括底盘座体;顶升旋转组件用于驱动所述托盘相对于所述机器人底盘作升降运动以及旋转运动;托架包括四个托体,每个托体下均设置有滚轮;所述托架可在收纳状态与展开状态间切换;在展开状态下,四个托体分别可托住货架的四个腿部,且所述托架整体可随所述托盘相对于所述托盘转动。本发明的物流货架搬运机器人及物流货架搬运方法通过设置托架,并使搬运机器人在搬运货架时使托架展开使四个托体托住货架的四个腿,使得搬运货架时,货架的四个腿部以及底部均

搬运机器人、货架、仓储系统以及搬运货架的方法.pdf
本发明的实施例提供了一种搬运机器人、货架、仓储系统以及搬运货架的方法。所述搬运机器人包括:轮廓传感器,所述轮廓传感器的检测面朝上,所述轮廓传感器用于当所述轮廓传感器在货架下方时,感测所述货架底部的支撑构件的轮廓;以及处理单元,其设置在所述搬运机器人上,用于根据所述支撑构件的轮廓控制所述搬运机器人与所述货架耦接,以搬运所述货架。本发明利用搬运机器人上设置的轮廓传感器来识别货架的支撑构件的轮廓,可以使搬运机器人与货架对准,避免两者在耦接时发生错误操作,从而实现仓储系统的自动化和智能化。
一种适用于智能搬运的物流货架.pdf
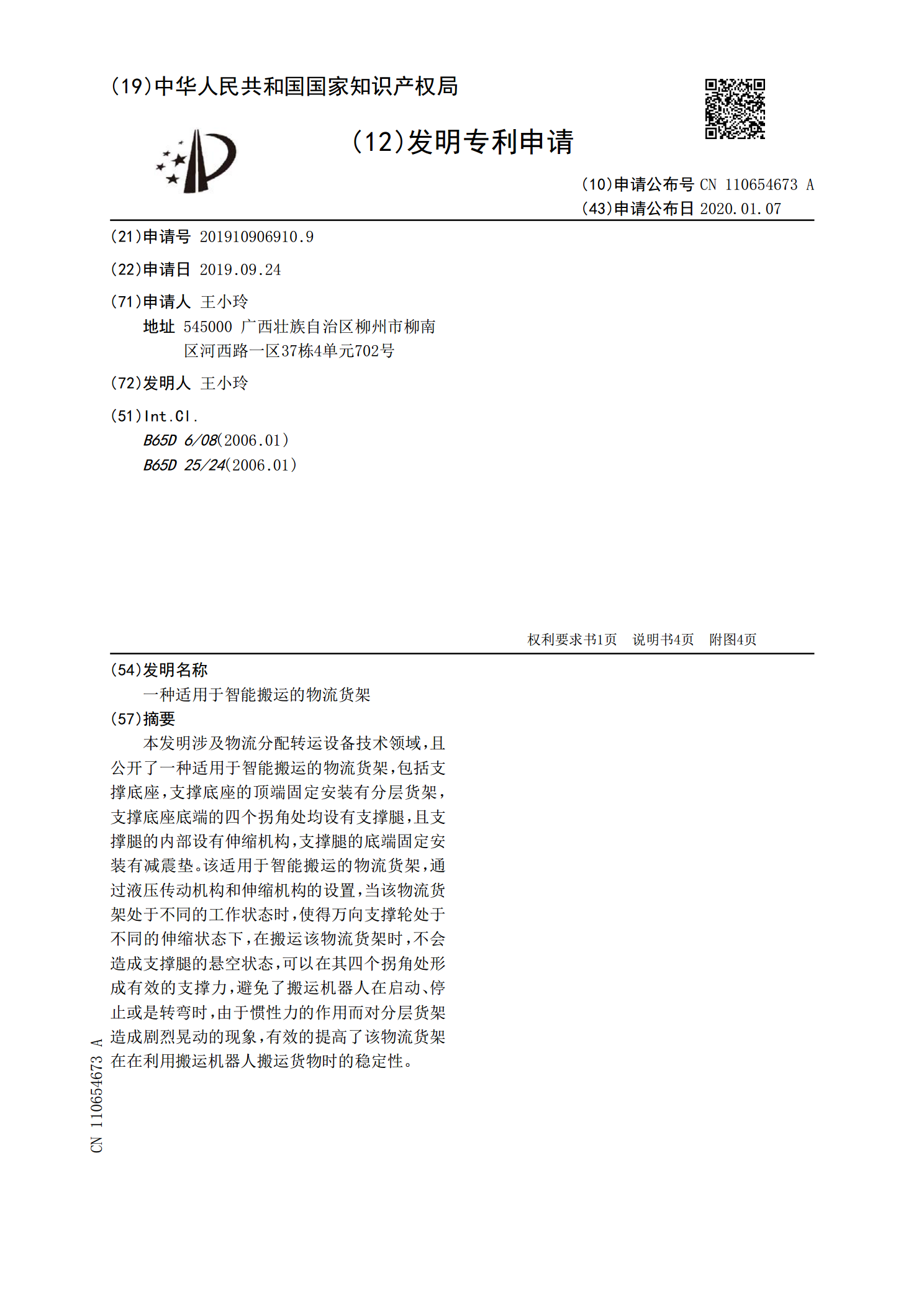
本发明涉及物流分配转运设备技术领域,且公开了一种适用于智能搬运的物流货架,包括支撑底座,支撑底座的顶端固定安装有分层货架,支撑底座底端的四个拐角处均设有支撑腿,且支撑腿的内部设有伸缩机构,支撑腿的底端固定安装有减震垫。该适用于智能搬运的物流货架,通过液压传动机构和伸缩机构的设置,当该物流货架处于不同的工作状态时,使得万向支撑轮处于不同的伸缩状态下,在搬运该物流货架时,不会造成支撑腿的悬空状态,可以在其四个拐角处形成有效的支撑力,避免了搬运机器人在启动、停止或是转弯时,由于惯性力的作用而对分层货架造成剧烈晃
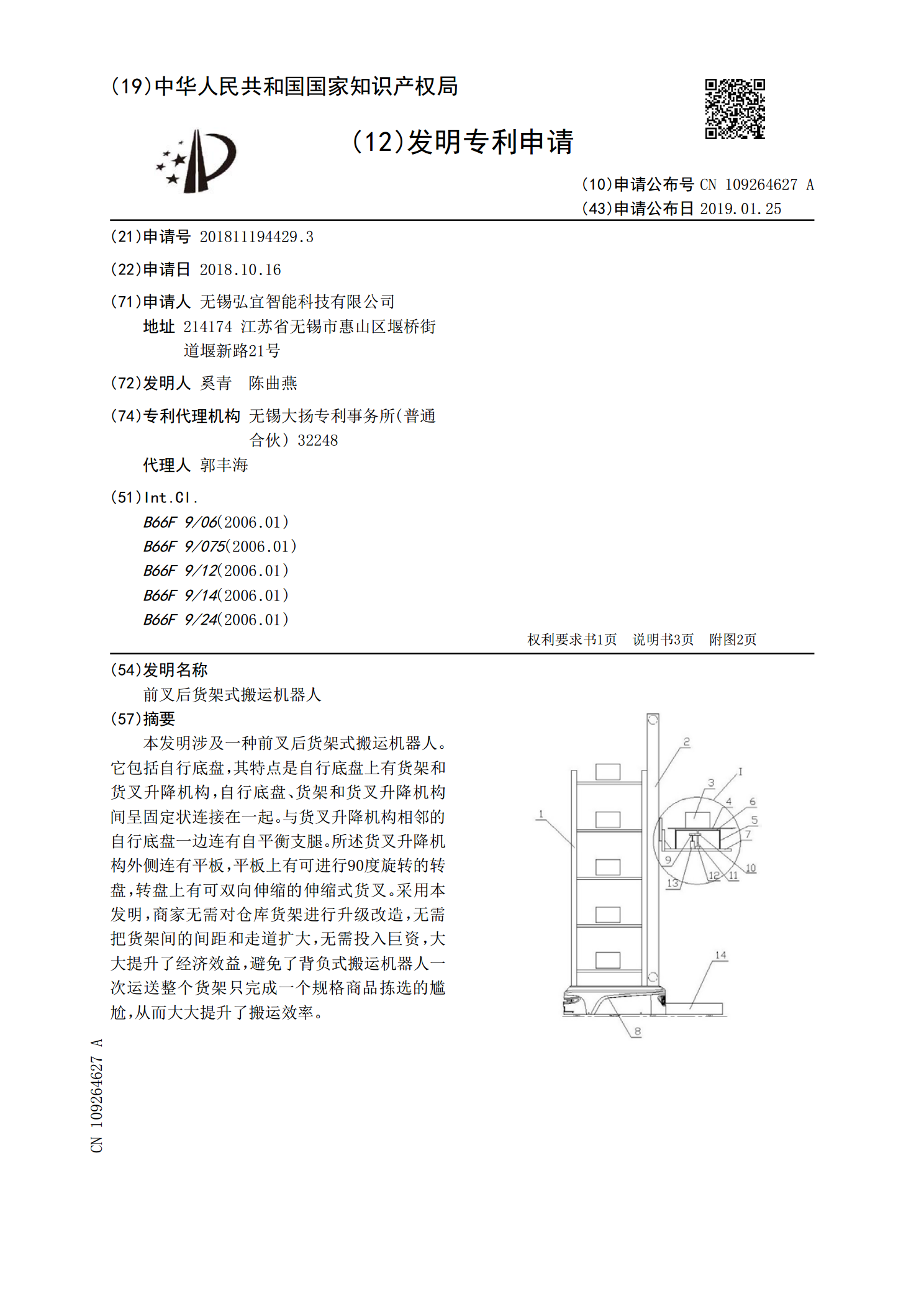
前叉后货架式搬运机器人.pdf
本发明涉及一种前叉后货架式搬运机器人。它包括自行底盘,其特点是自行底盘上有货架和货叉升降机构,自行底盘、货架和货叉升降机构间呈固定状连接在一起。与货叉升降机构相邻的自行底盘一边连有自平衡支腿。所述货叉升降机构外侧连有平板,平板上有可进行90度旋转的转盘,转盘上有可双向伸缩的伸缩式货叉。采用本发明,商家无需对仓库货架进行升级改造,无需把货架间的间距和走道扩大,无需投入巨资,大大提升了经济效益,避免了背负式搬运机器人一次运送整个货架只完成一个规格商品拣选的尴尬,从而大大提升了搬运效率。
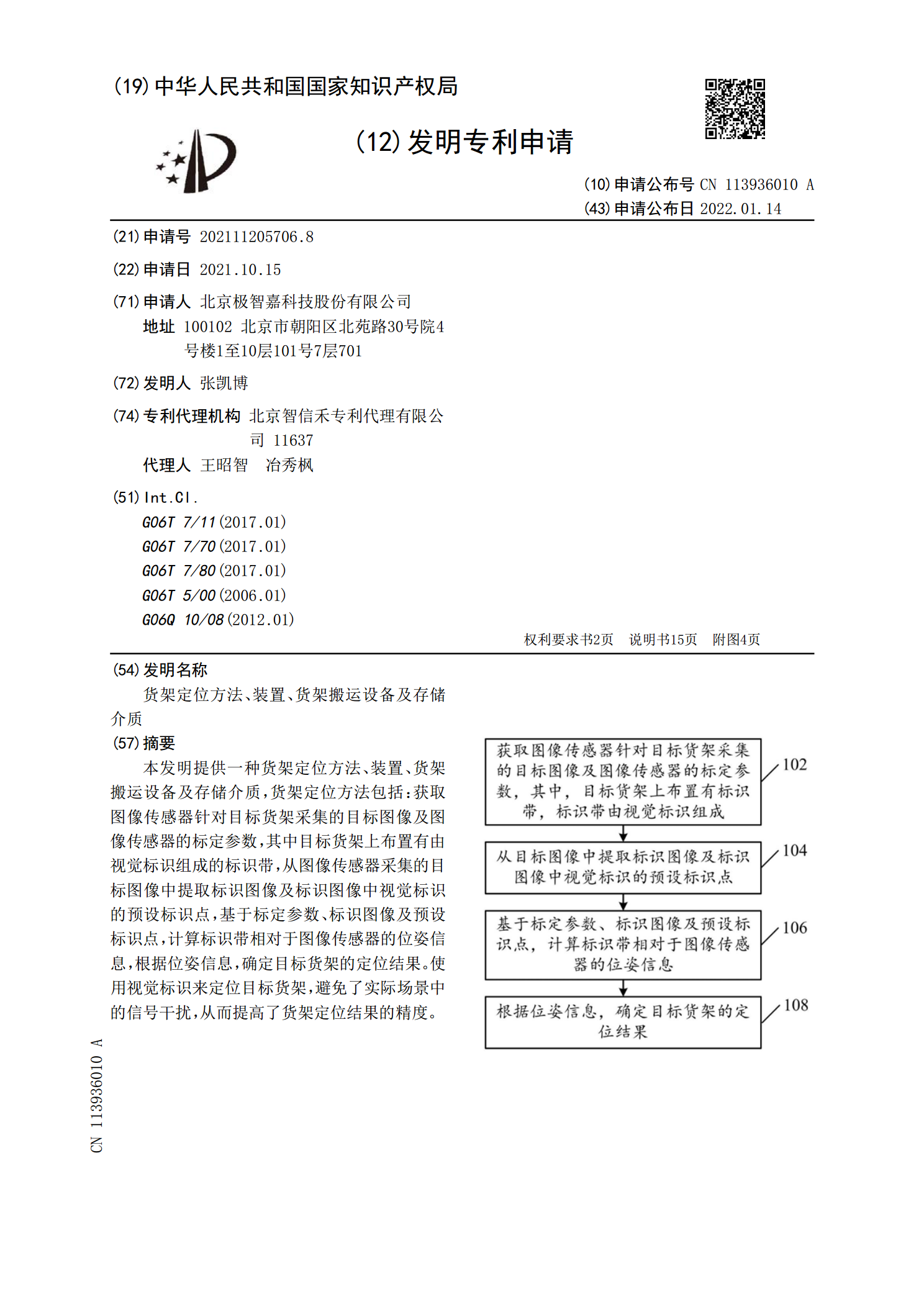
货架定位方法、装置、货架搬运设备及存储介质.pdf
本发明提供一种货架定位方法、装置、货架搬运设备及存储介质,货架定位方法包括:获取图像传感器针对目标货架采集的目标图像及图像传感器的标定参数,其中目标货架上布置有由视觉标识组成的标识带,从图像传感器采集的目标图像中提取标识图像及标识图像中视觉标识的预设标识点,基于标定参数、标识图像及预设标识点,计算标识带相对于图像传感器的位姿信息,根据位姿信息,确定目标货架的定位结果。使用视觉标识来定位目标货架,避免了实际场景中的信号干扰,从而提高了货架定位结果的精度。