
栈板搬运AGV.pdf

一吃****仕龙


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
栈板搬运AGV.pdf
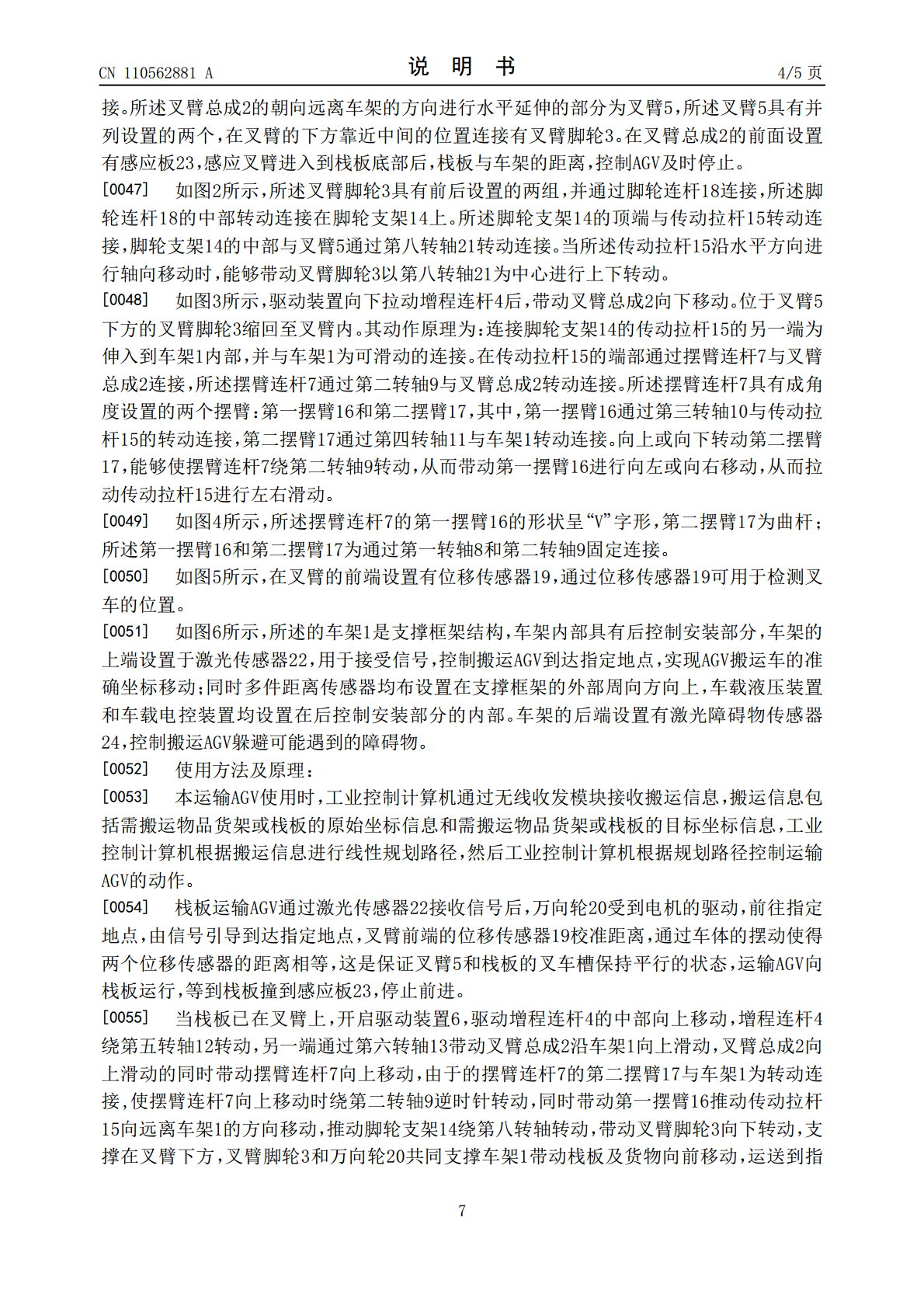
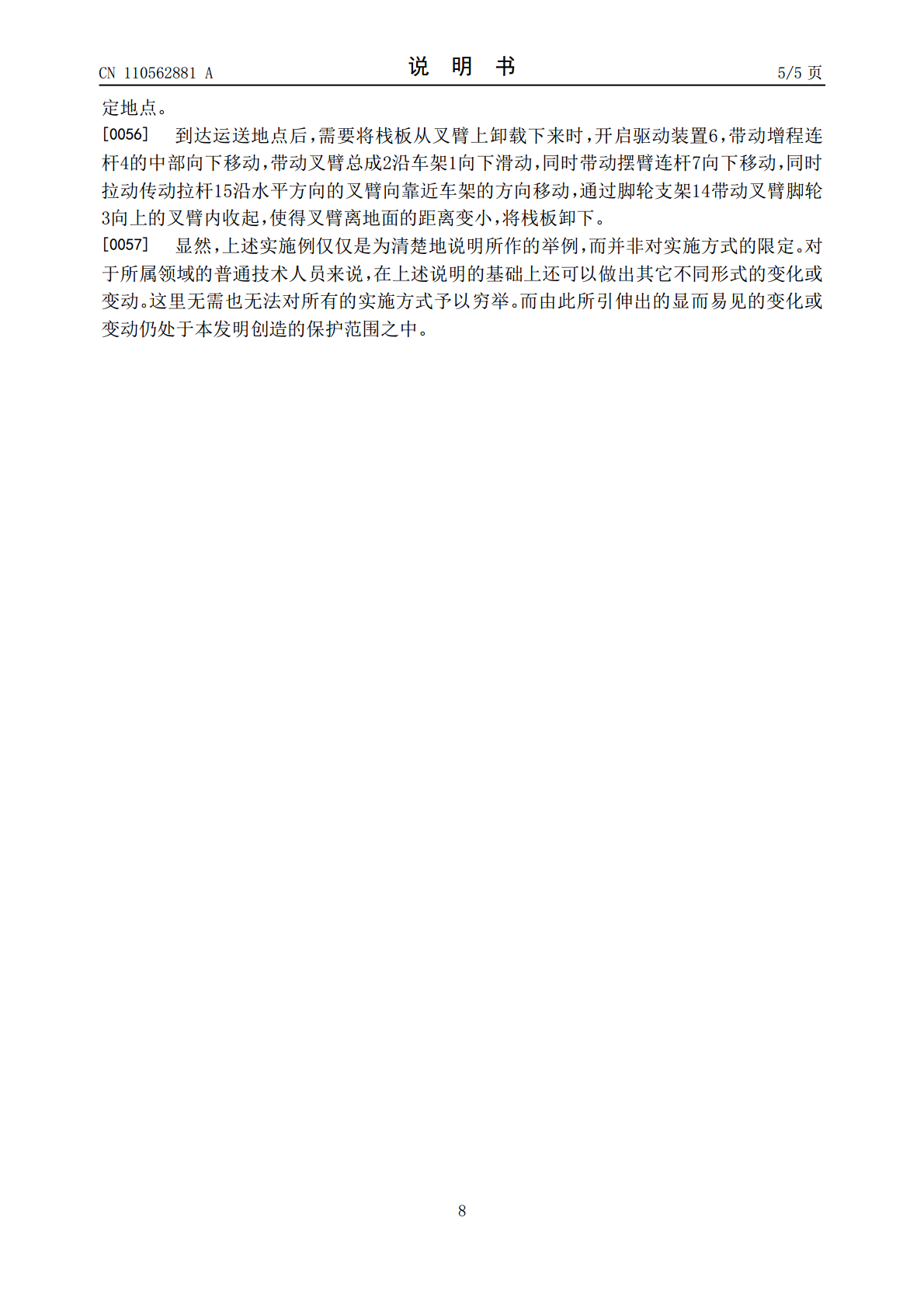
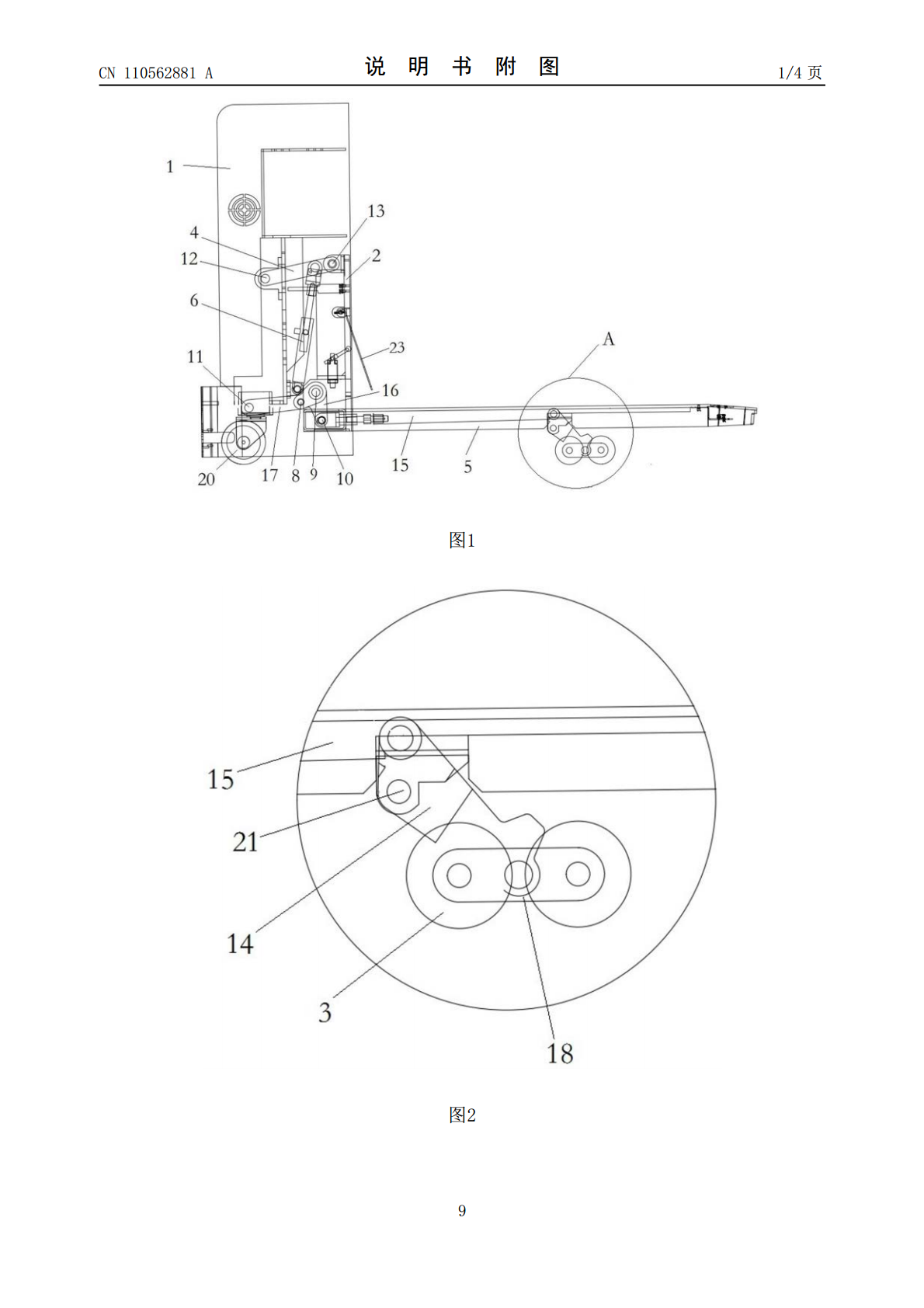
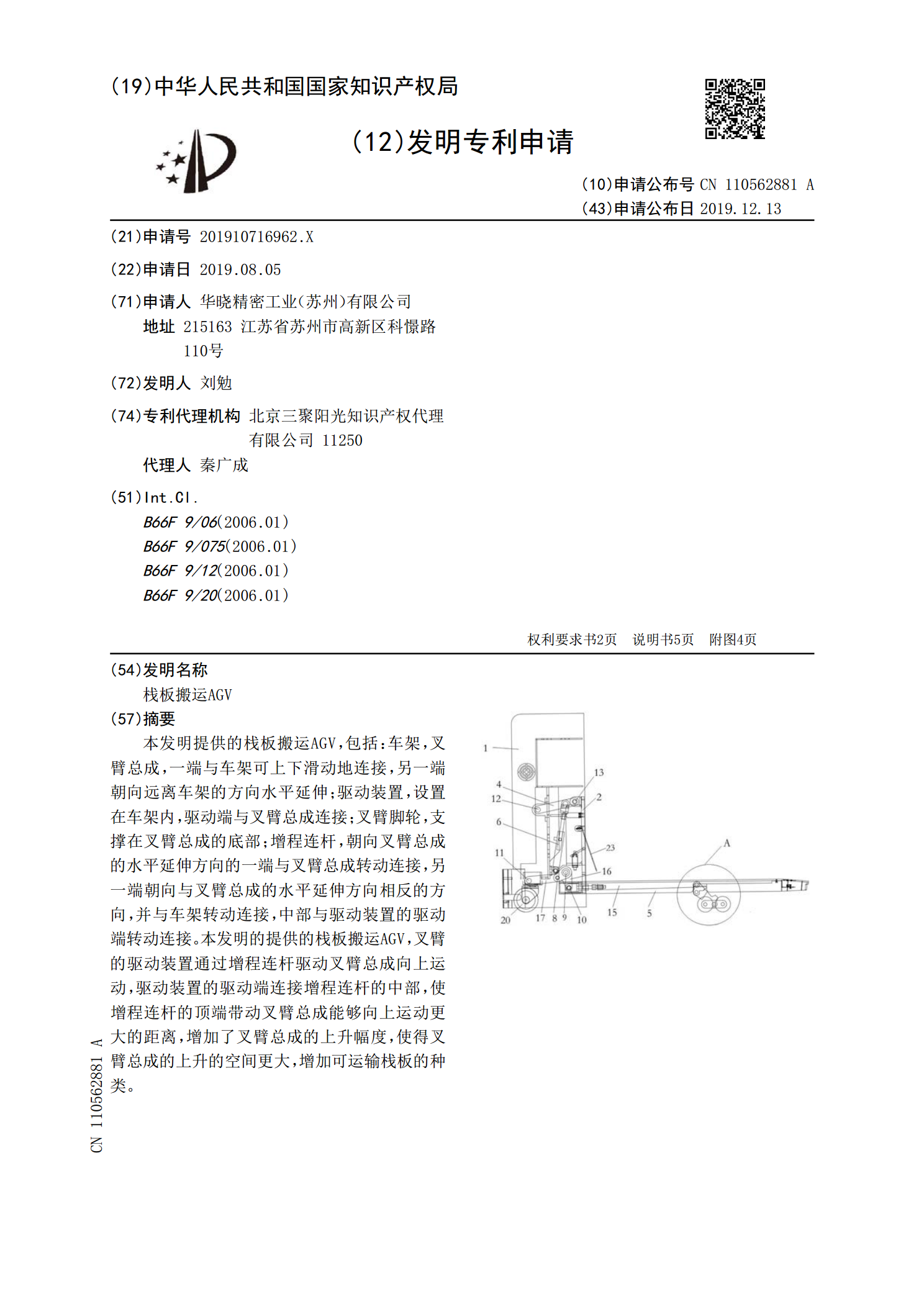
本发明提供的栈板搬运AGV,包括:车架,叉臂总成,一端与车架可上下滑动地连接,另一端朝向远离车架的方向水平延伸;驱动装置,设置在车架内,驱动端与叉臂总成连接;叉臂脚轮,支撑在叉臂总成的底部;增程连杆,朝向叉臂总成的水平延伸方向的一端与叉臂总成转动连接,另一端朝向与叉臂总成的水平延伸方向相反的方向,并与车架转动连接,中部与驱动装置的驱动端转动连接。本发明的提供的栈板搬运AGV,叉臂的驱动装置通过增程连杆驱动叉臂总成向上运动,驱动装置的驱动端连接增程连杆的中部,使增程连杆的顶端带动叉臂总成能够向上运动更大的距

路障搬运AGV.pdf
本发明的路障搬运AGV,包括:车体,设有仓储区以及转接区;输送机构,分别衔接所述仓储区和转接区;上下料机构,包括叉臂、升降组件和平移组件,升降组件用于驱动叉臂沿竖向方向作升降运动,平移组件用于驱动所述叉臂沿转接区和外侧方向往复移动;第一阻挡器,设于车体内,包括第一挡块和第一驱动器;与现有技术相比,本发明的路障搬运AGV,叉臂通过平移组件和升降组件的组合驱动可将路面的路障搬运至车体的转接区内,并可通过输送结构回收至仓储区内存放,转接区内的第一阻挡器可自动伸出限位路障停留更长的时间,便于叉臂脱离与当前路障的连
汽车自动搬运AGV.pdf
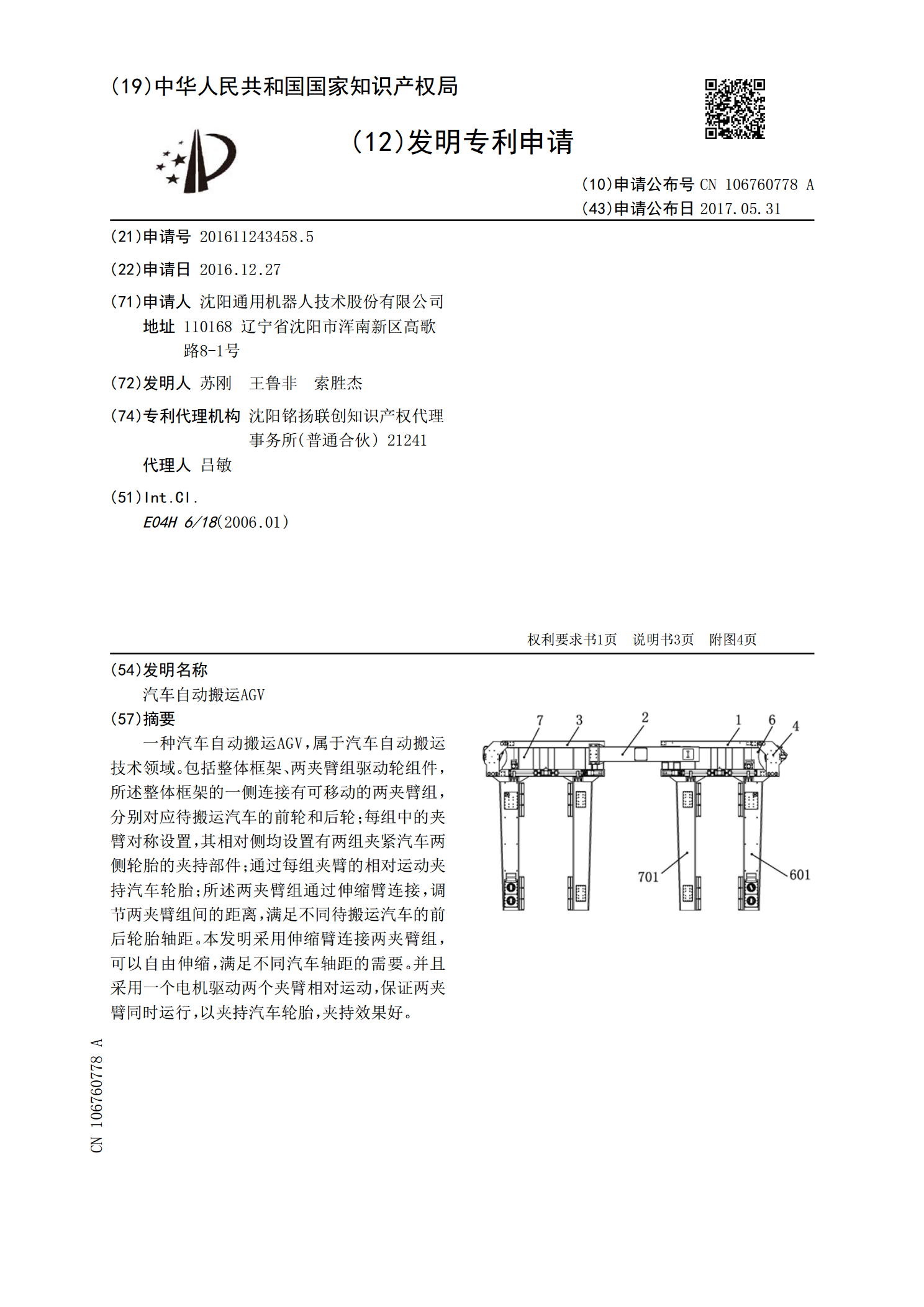
一种汽车自动搬运AGV,属于汽车自动搬运技术领域。包括整体框架、两夹臂组驱动轮组件,所述整体框架的一侧连接有可移动的两夹臂组,分别对应待搬运汽车的前轮和后轮;每组中的夹臂对称设置,其相对侧均设置有两组夹紧汽车两侧轮胎的夹持部件;通过每组夹臂的相对运动夹持汽车轮胎;所述两夹臂组通过伸缩臂连接,调节两夹臂组间的距离,满足不同待搬运汽车的前后轮胎轴距。本发明采用伸缩臂连接两夹臂组,可以自由伸缩,满足不同汽车轴距的需要。并且采用一个电机驱动两个夹臂相对运动,保证两夹臂同时运行,以夹持汽车轮胎,夹持效果好。
AGV汽车搬运装置.pdf
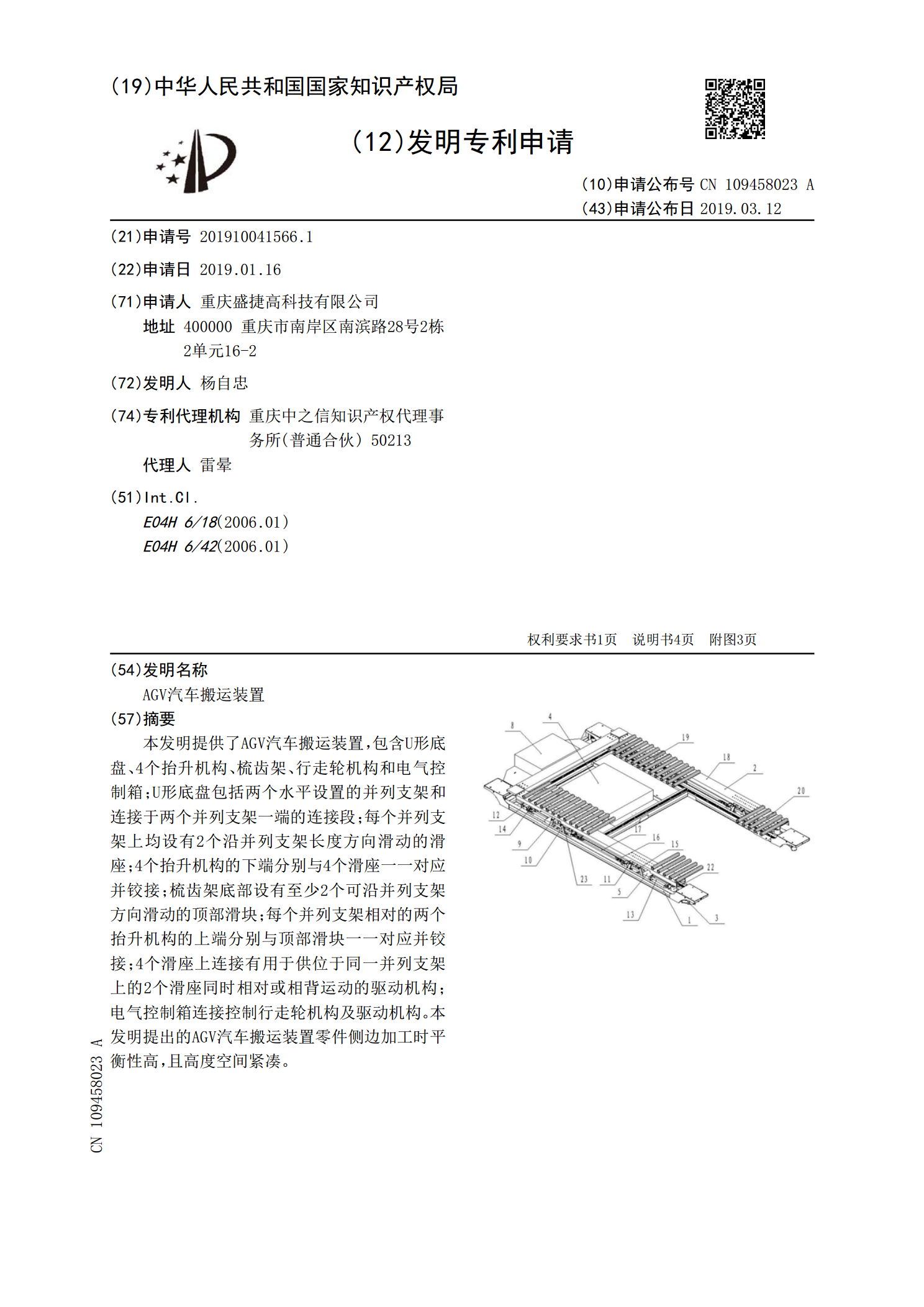
本发明提供了AGV汽车搬运装置,包含U形底盘、4个抬升机构、梳齿架、行走轮机构和电气控制箱;U形底盘包括两个水平设置的并列支架和连接于两个并列支架一端的连接段;每个并列支架上均设有2个沿并列支架长度方向滑动的滑座;4个抬升机构的下端分别与4个滑座一一对应并铰接;梳齿架底部设有至少2个可沿并列支架方向滑动的顶部滑块;每个并列支架相对的两个抬升机构的上端分别与顶部滑块一一对应并铰接;4个滑座上连接有用于供位于同一并列支架上的2个滑座同时相对或相背运动的驱动机构;电气控制箱连接控制行走轮机构及驱动机构。本发明提
塑胶栈板.pdf
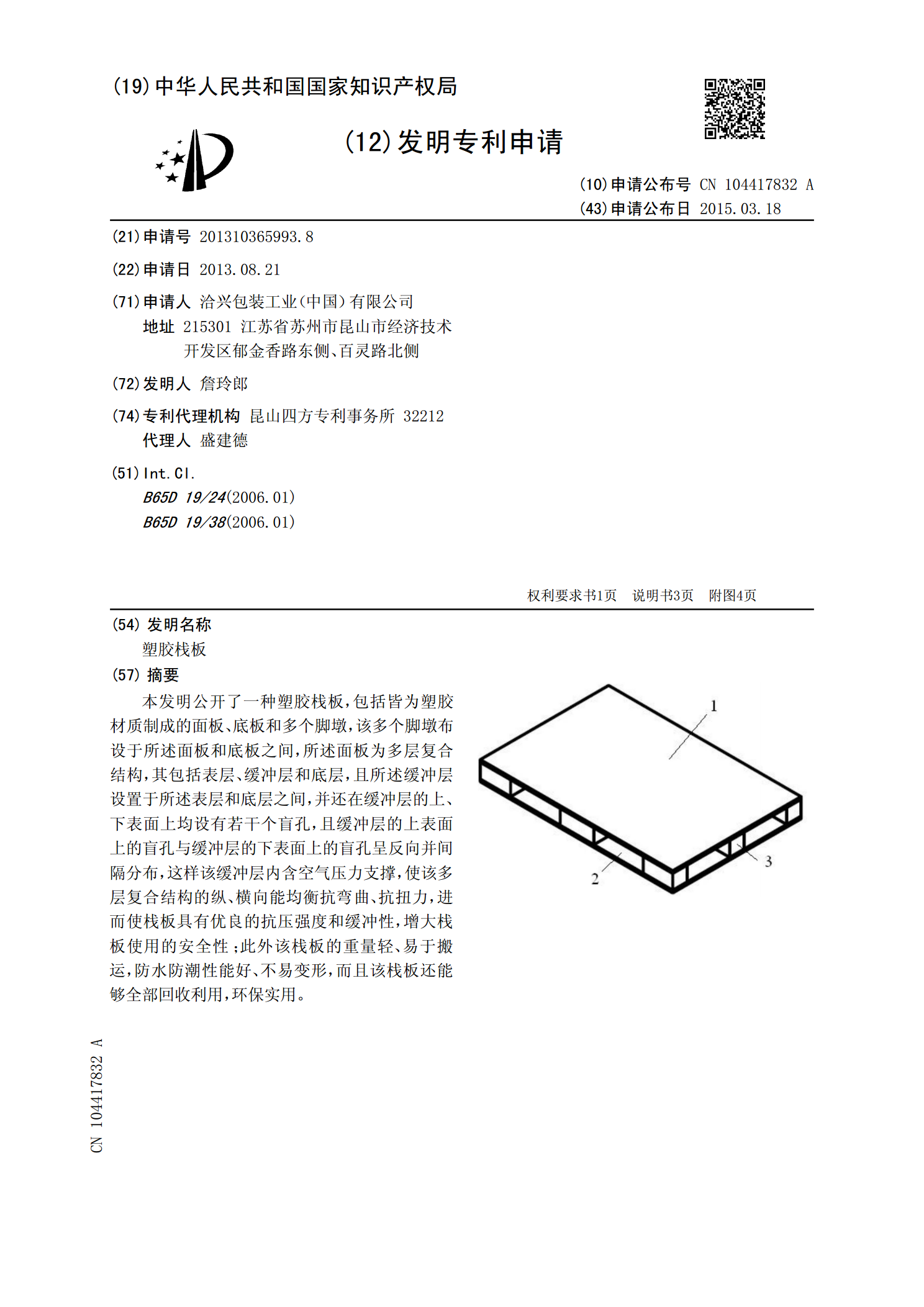
本发明公开了一种塑胶栈板,包括皆为塑胶材质制成的面板、底板和多个脚墩,该多个脚墩布设于所述面板和底板之间,所述面板为多层复合结构,其包括表层、缓冲层和底层,且所述缓冲层设置于所述表层和底层之间,并还在缓冲层的上、下表面上均设有若干个盲孔,且缓冲层的上表面上的盲孔与缓冲层的下表面上的盲孔呈反向并间隔分布,这样该缓冲层内含空气压力支撑,使该多层复合结构的纵、横向能均衡抗弯曲、抗扭力,进而使栈板具有优良的抗压强度和缓冲性,增大栈板使用的安全性;此外该栈板的重量轻、易于搬运,防水防潮性能好、不易变形,而且该栈板还