
一种割草机器人割草调高一体化装置及其调高控制方法.pdf

一只****iu

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种割草机器人割草调高一体化装置及其调高控制方法.pdf
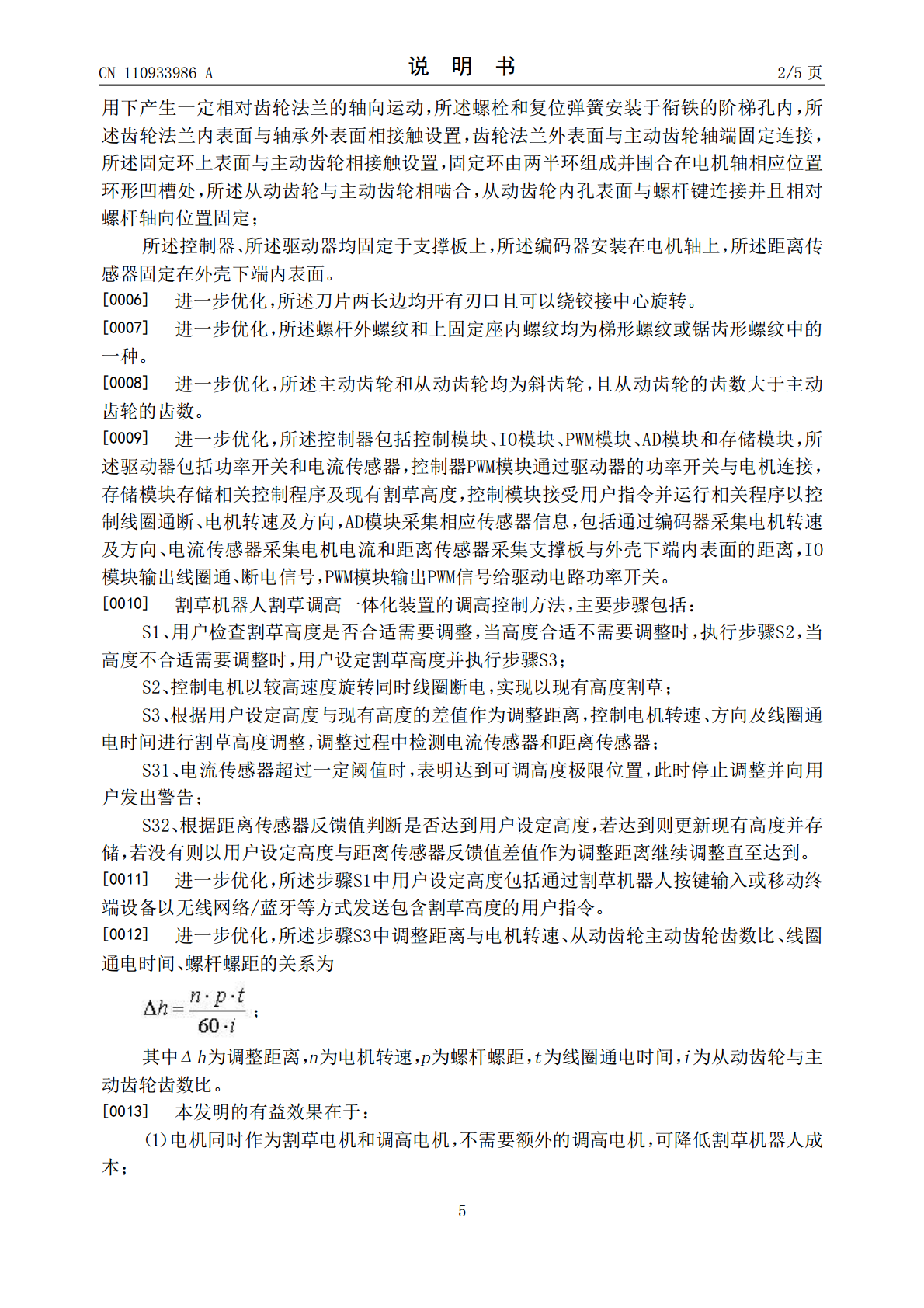
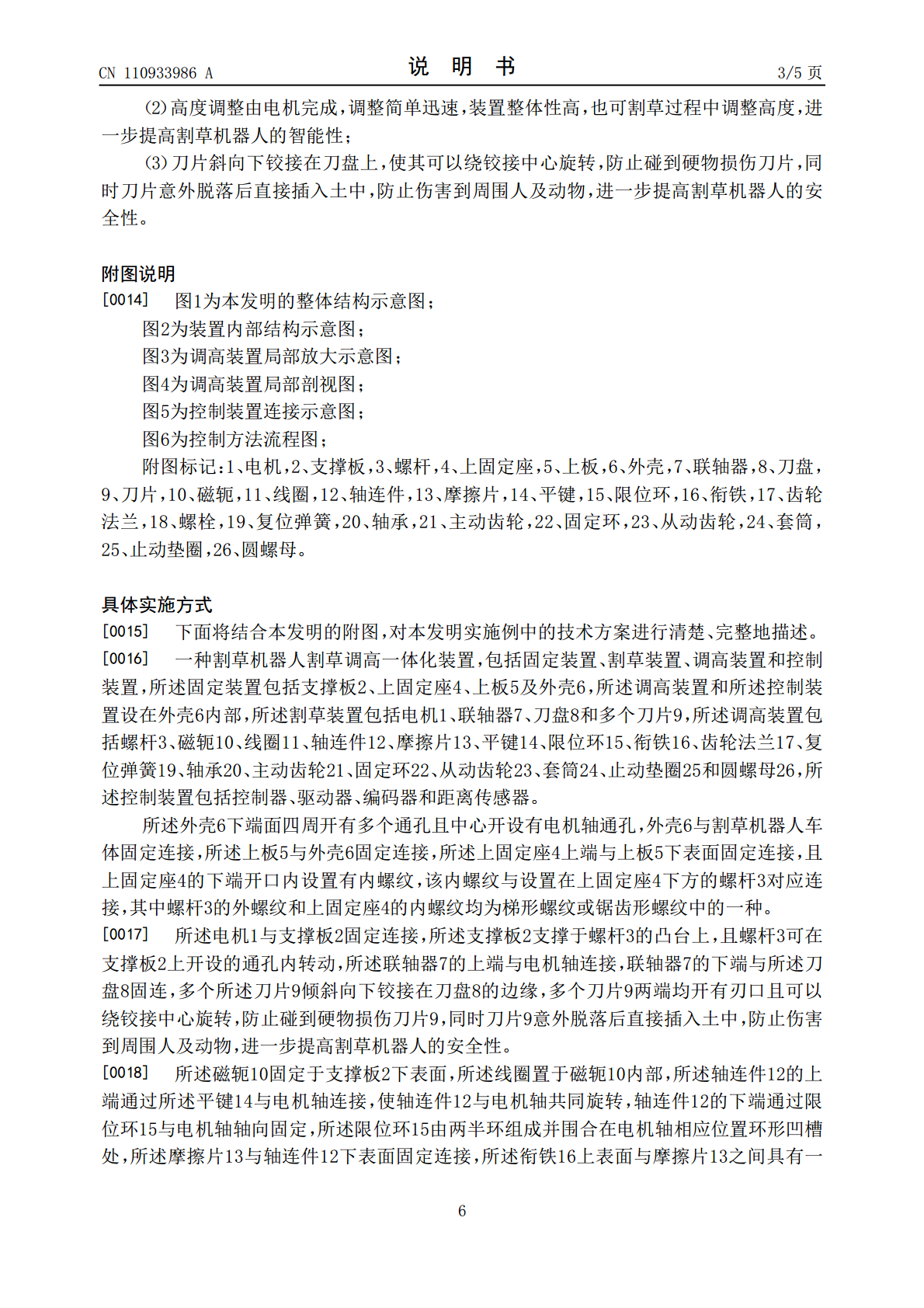
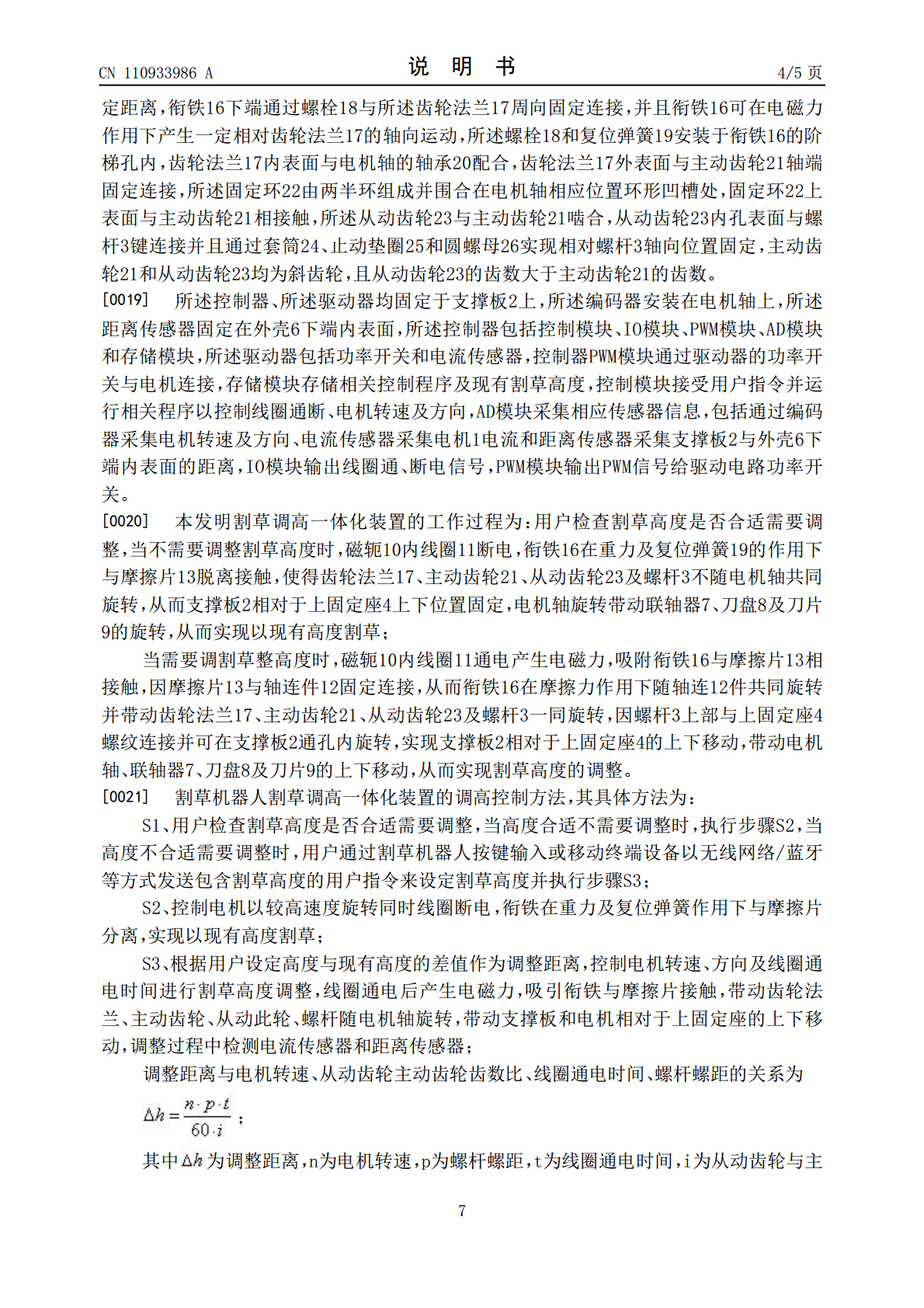
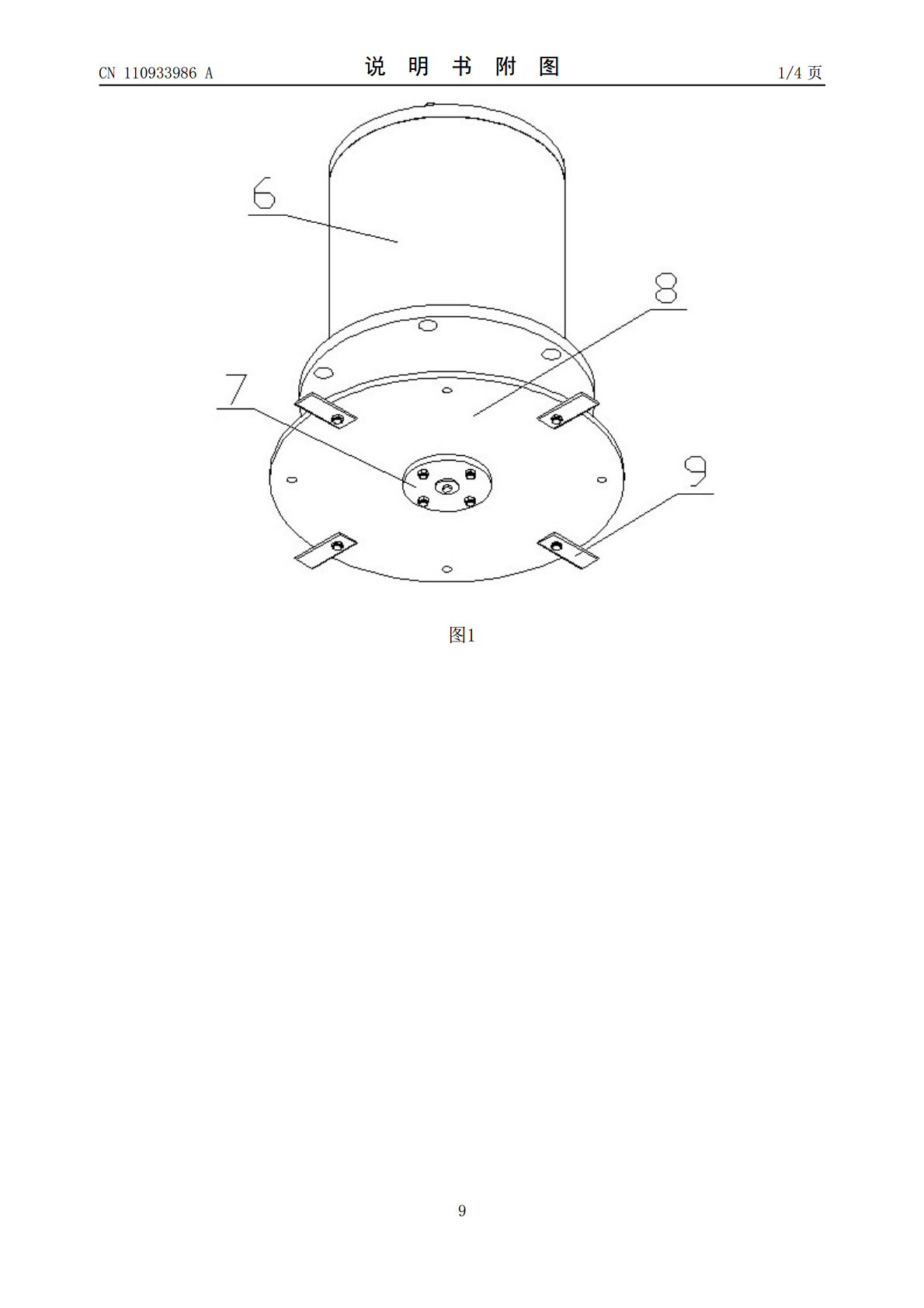
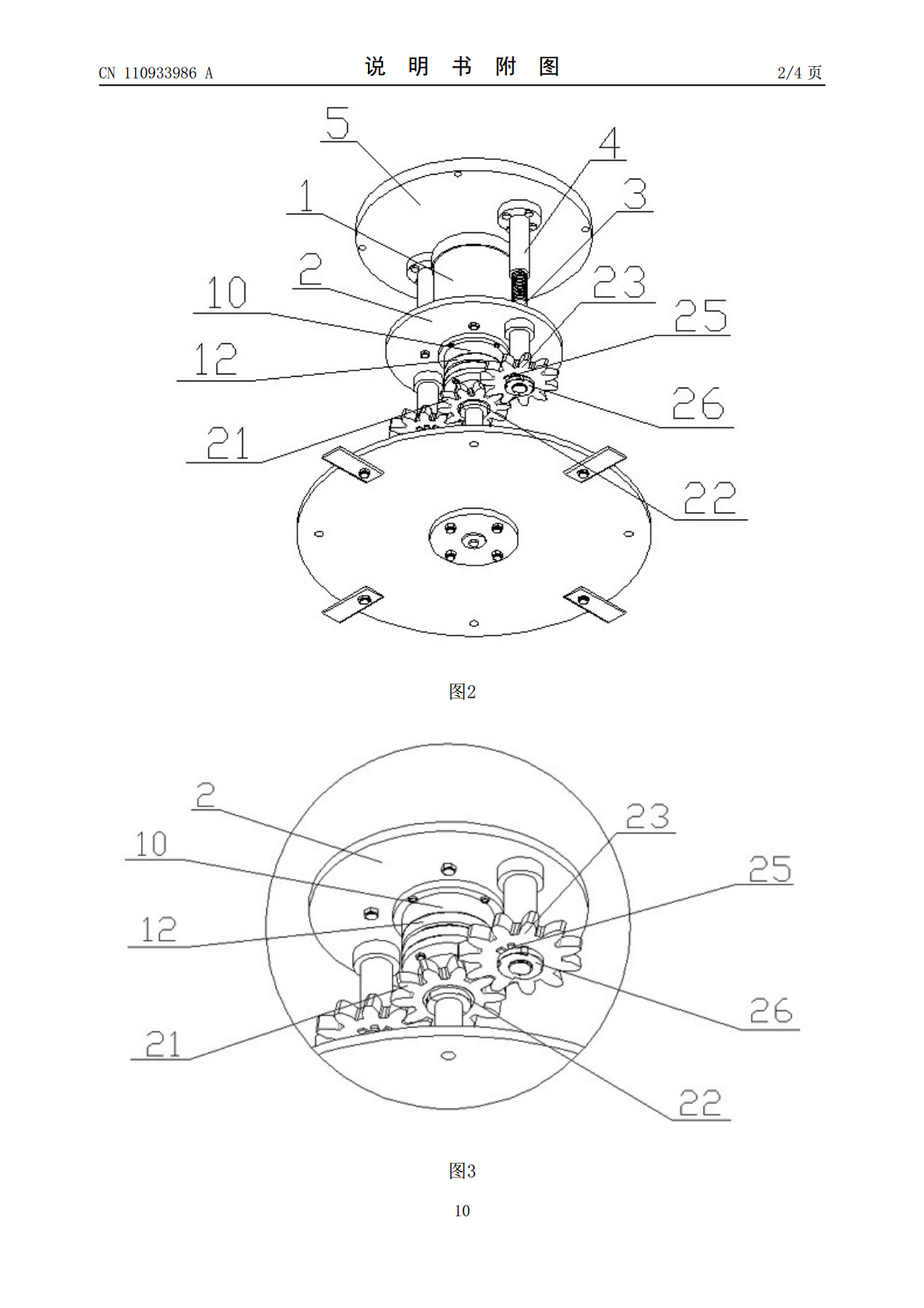
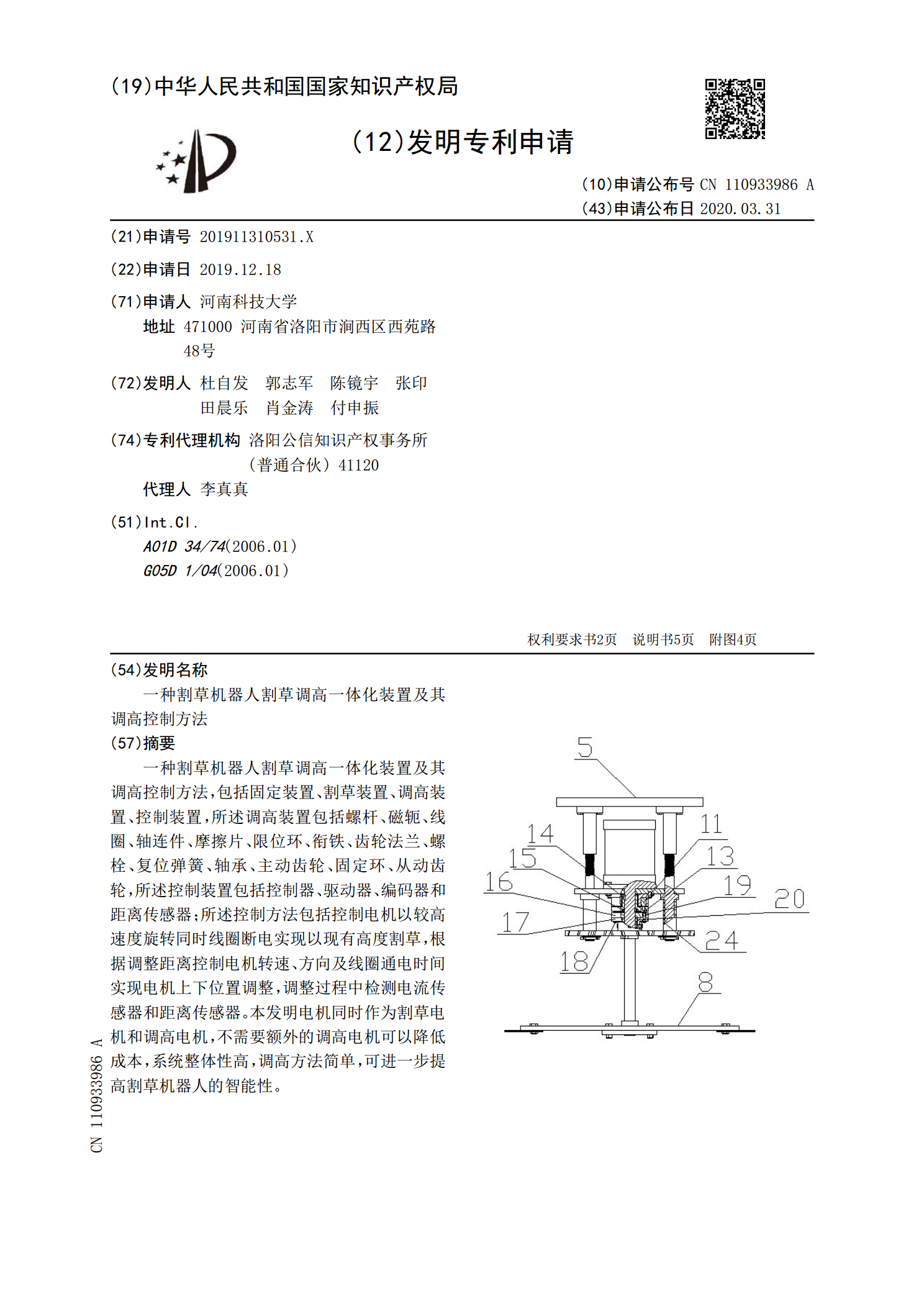
一种割草机器人割草调高一体化装置及其调高控制方法,包括固定装置、割草装置、调高装置、控制装置,所述调高装置包括螺杆、磁轭、线圈、轴连件、摩擦片、限位环、衔铁、齿轮法兰、螺栓、复位弹簧、轴承、主动齿轮、固定环、从动齿轮,所述控制装置包括控制器、驱动器、编码器和距离传感器;所述控制方法包括控制电机以较高速度旋转同时线圈断电实现以现有高度割草,根据调整距离控制电机转速、方向及线圈通电时间实现电机上下位置调整,调整过程中检测电流传感器和距离传感器。本发明电机同时作为割草电机和调高电机,不需要额外的调高电机可以降低
调高装置及具有该调高装置的割草机.pdf
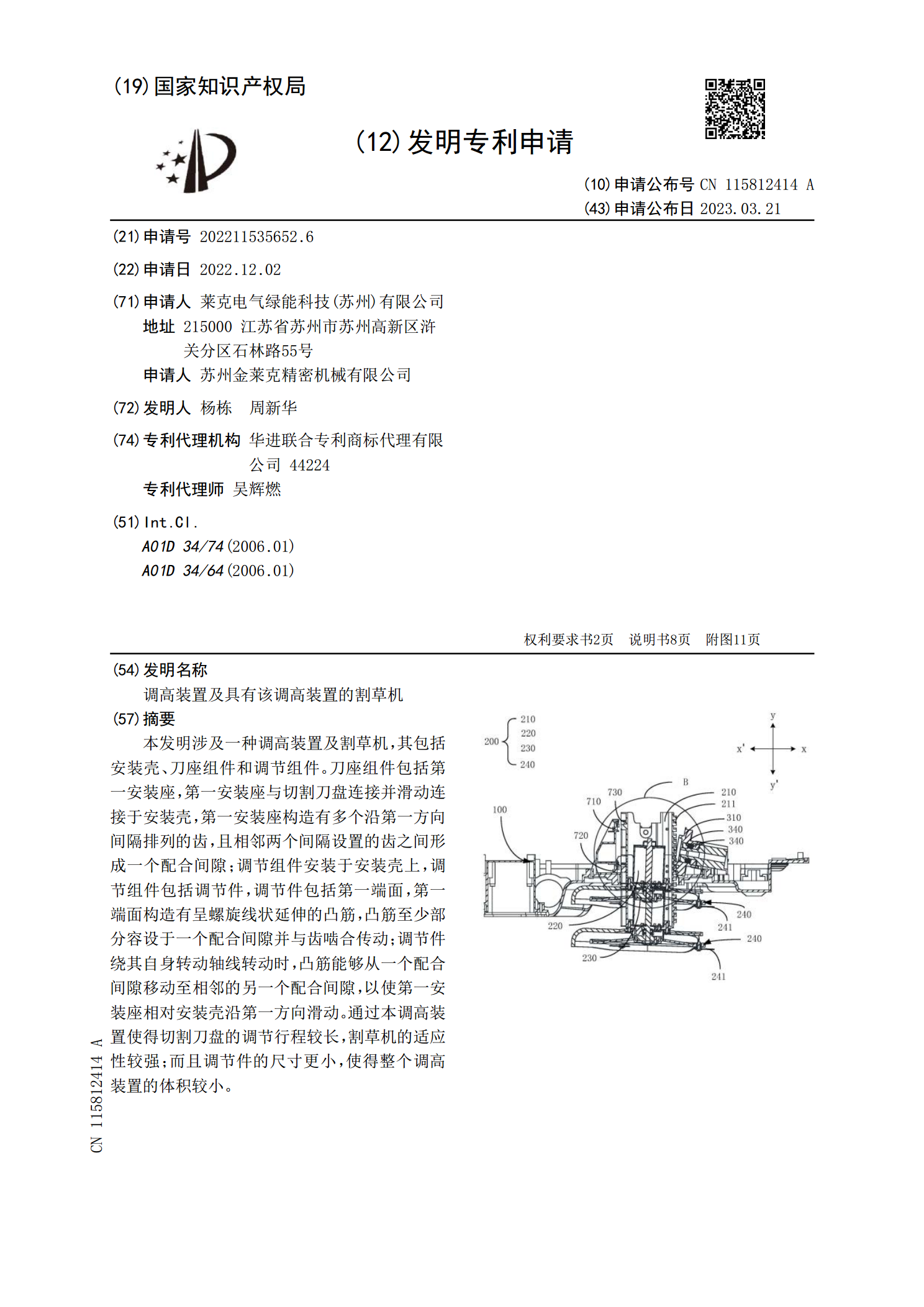
本发明涉及一种调高装置及割草机,其包括安装壳、刀座组件和调节组件。刀座组件包括第一安装座,第一安装座与切割刀盘连接并滑动连接于安装壳,第一安装座构造有多个沿第一方向间隔排列的齿,且相邻两个间隔设置的齿之间形成一个配合间隙;调节组件安装于安装壳上,调节组件包括调节件,调节件包括第一端面,第一端面构造有呈螺旋线状延伸的凸筋,凸筋至少部分容设于一个配合间隙并与齿啮合传动;调节件绕其自身转动轴线转动时,凸筋能够从一个配合间隙移动至相邻的另一个配合间隙,以使第一安装座相对安装壳沿第一方向滑动。通过本调高装置使得切割
一种用于智能割草设备调高系统的电机保护方法及调高系统.pdf
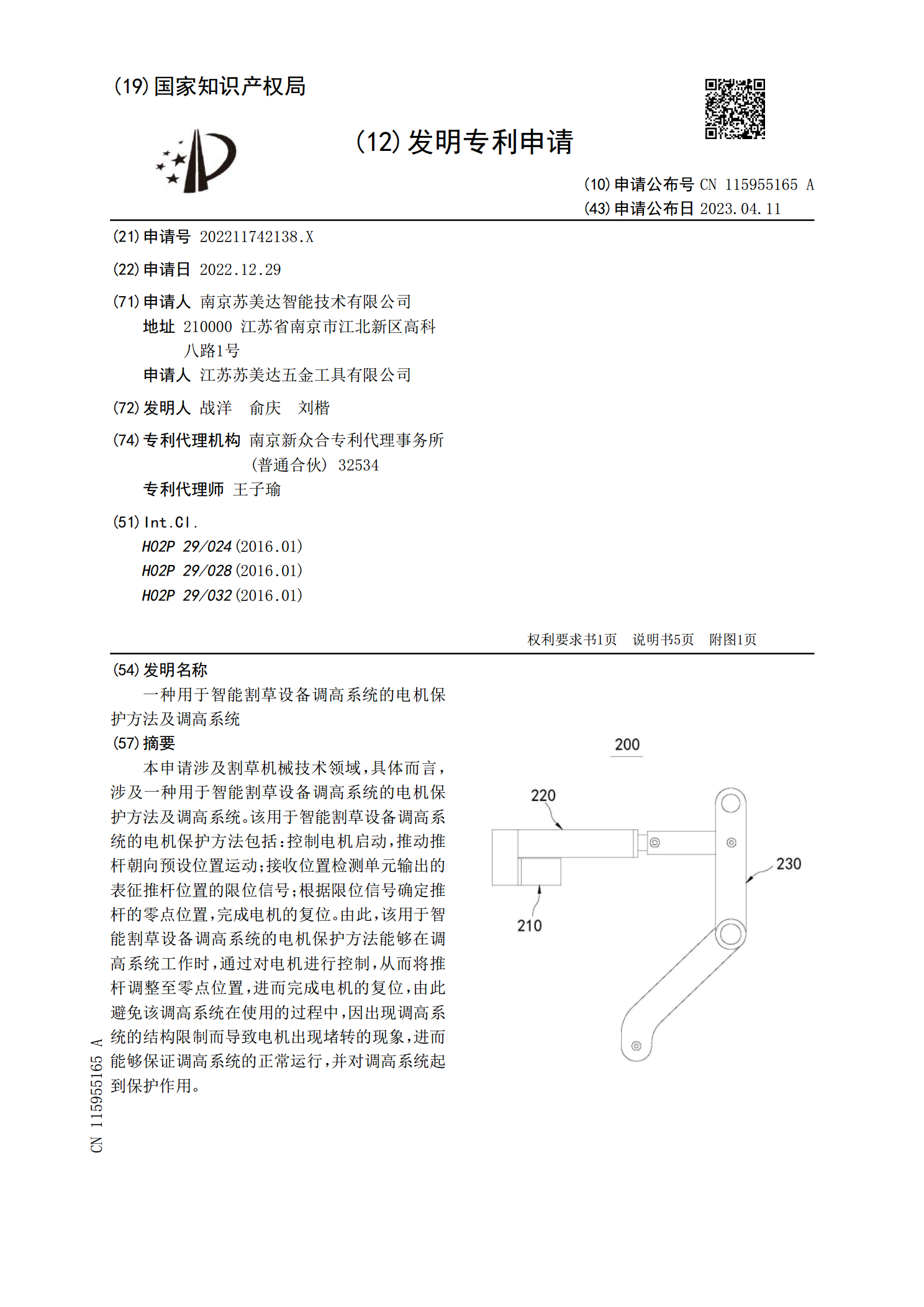
本申请涉及割草机械技术领域,具体而言,涉及一种用于智能割草设备调高系统的电机保护方法及调高系统。该用于智能割草设备调高系统的电机保护方法包括:控制电机启动,推动推杆朝向预设位置运动;接收位置检测单元输出的表征推杆位置的限位信号;根据限位信号确定推杆的零点位置,完成电机的复位。由此,该用于智能割草设备调高系统的电机保护方法能够在调高系统工作时,通过对电机进行控制,从而将推杆调整至零点位置,进而完成电机的复位,由此避免该调高系统在使用的过程中,因出现调高系统的结构限制而导致电机出现堵转的现象,进而能够保证调高
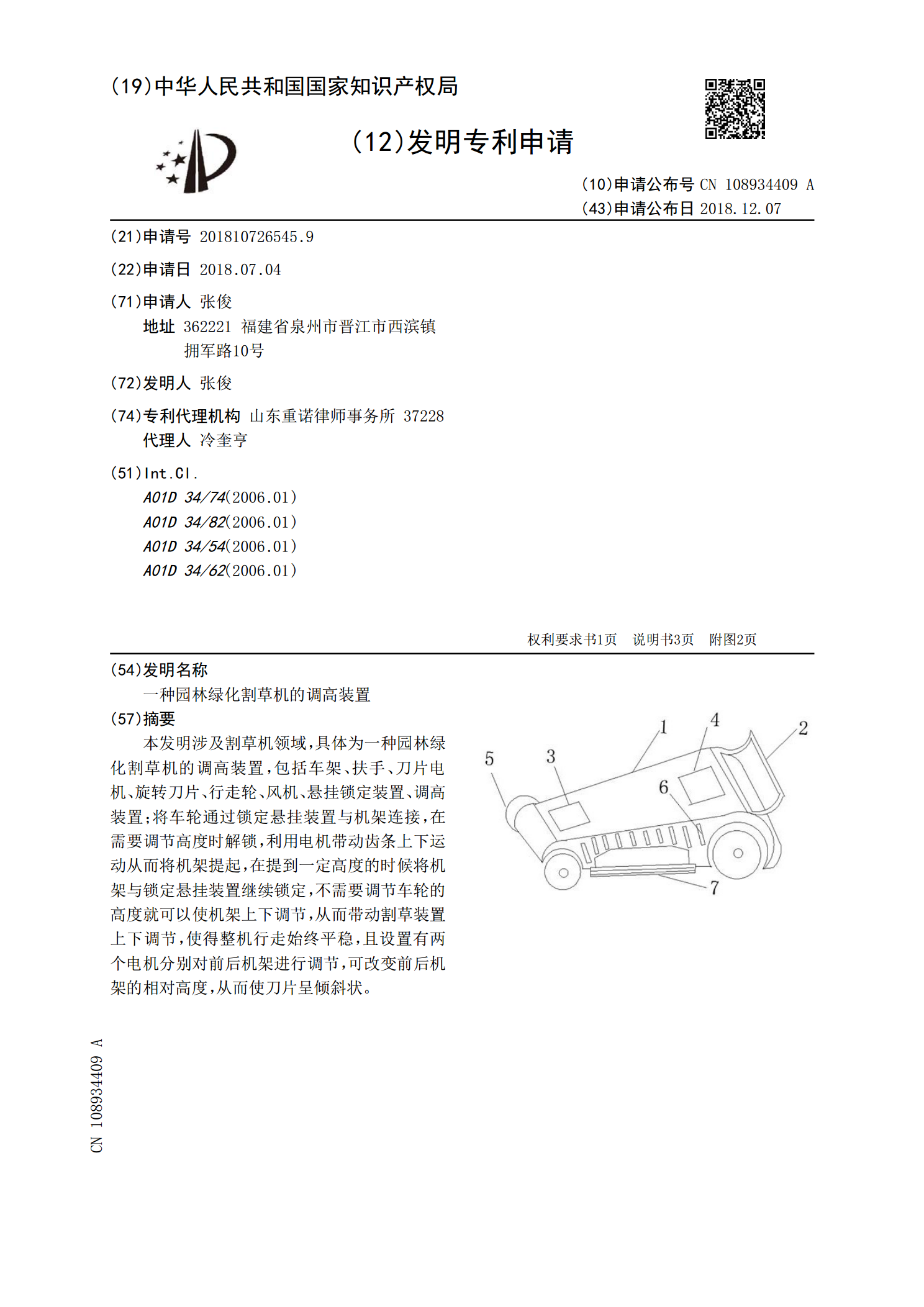
一种园林绿化割草机的调高装置.pdf
本发明涉及割草机领域,具体为一种园林绿化割草机的调高装置,包括车架、扶手、刀片电机、旋转刀片、行走轮、风机、悬挂锁定装置、调高装置;将车轮通过锁定悬挂装置与机架连接,在需要调节高度时解锁,利用电机带动齿条上下运动从而将机架提起,在提到一定高度的时候将机架与锁定悬挂装置继续锁定,不需要调节车轮的高度就可以使机架上下调节,从而带动割草装置上下调节,使得整机行走始终平稳,且设置有两个电机分别对前后机架进行调节,可改变前后机架的相对高度,从而使刀片呈倾斜状。
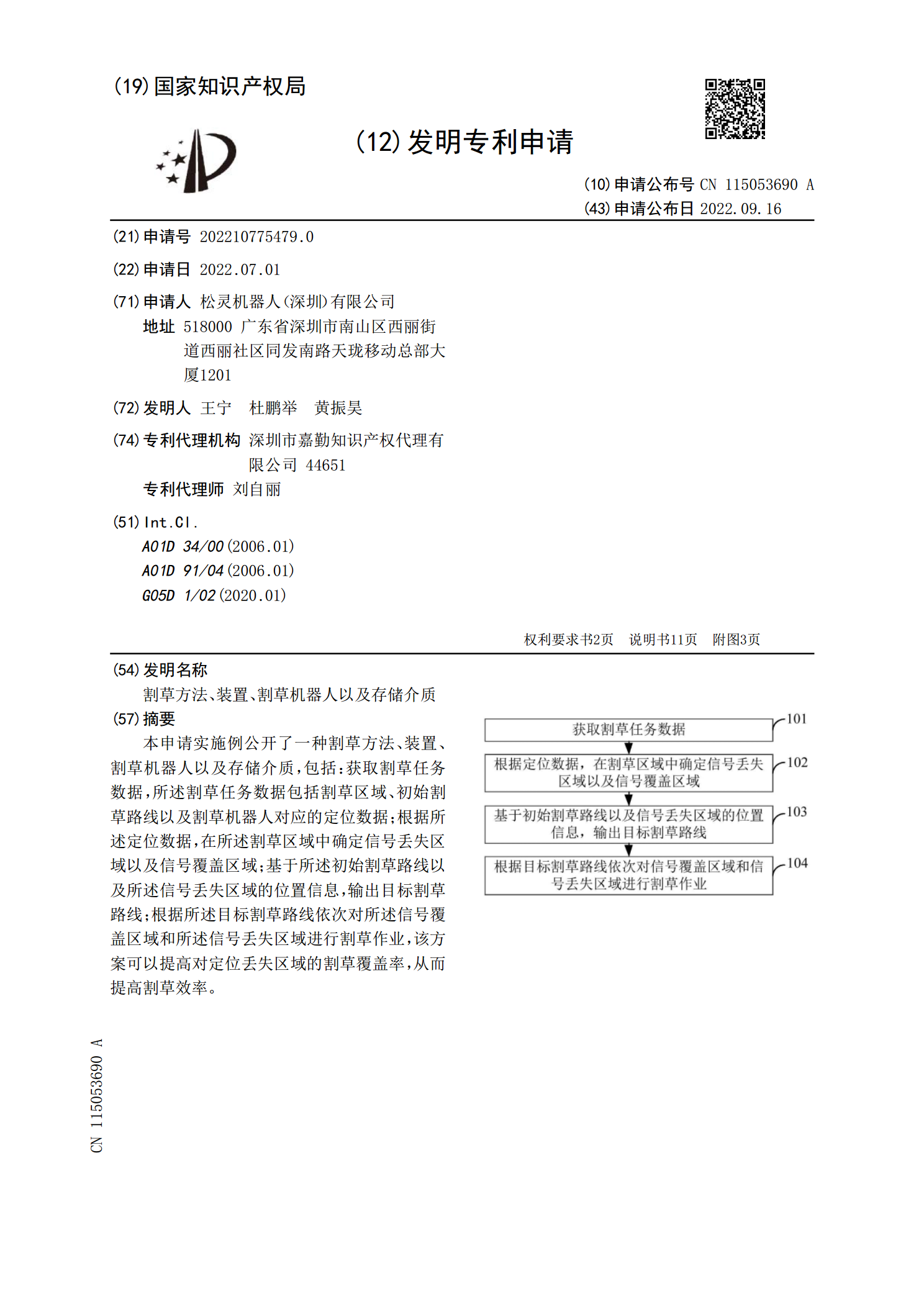
割草方法、装置、割草机器人以及存储介质.pdf
本申请实施例公开了一种割草方法、装置、割草机器人以及存储介质,包括:获取割草任务数据,所述割草任务数据包括割草区域、初始割草路线以及割草机器人对应的定位数据;根据所述定位数据,在所述割草区域中确定信号丢失区域以及信号覆盖区域;基于所述初始割草路线以及所述信号丢失区域的位置信息,输出目标割草路线;根据所述目标割草路线依次对所述信号覆盖区域和所述信号丢失区域进行割草作业,该方案可以提高对定位丢失区域的割草覆盖率,从而提高割草效率。