
一种风电叶片打磨机器人.pdf

永香****能手

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种风电叶片打磨机器人.pdf
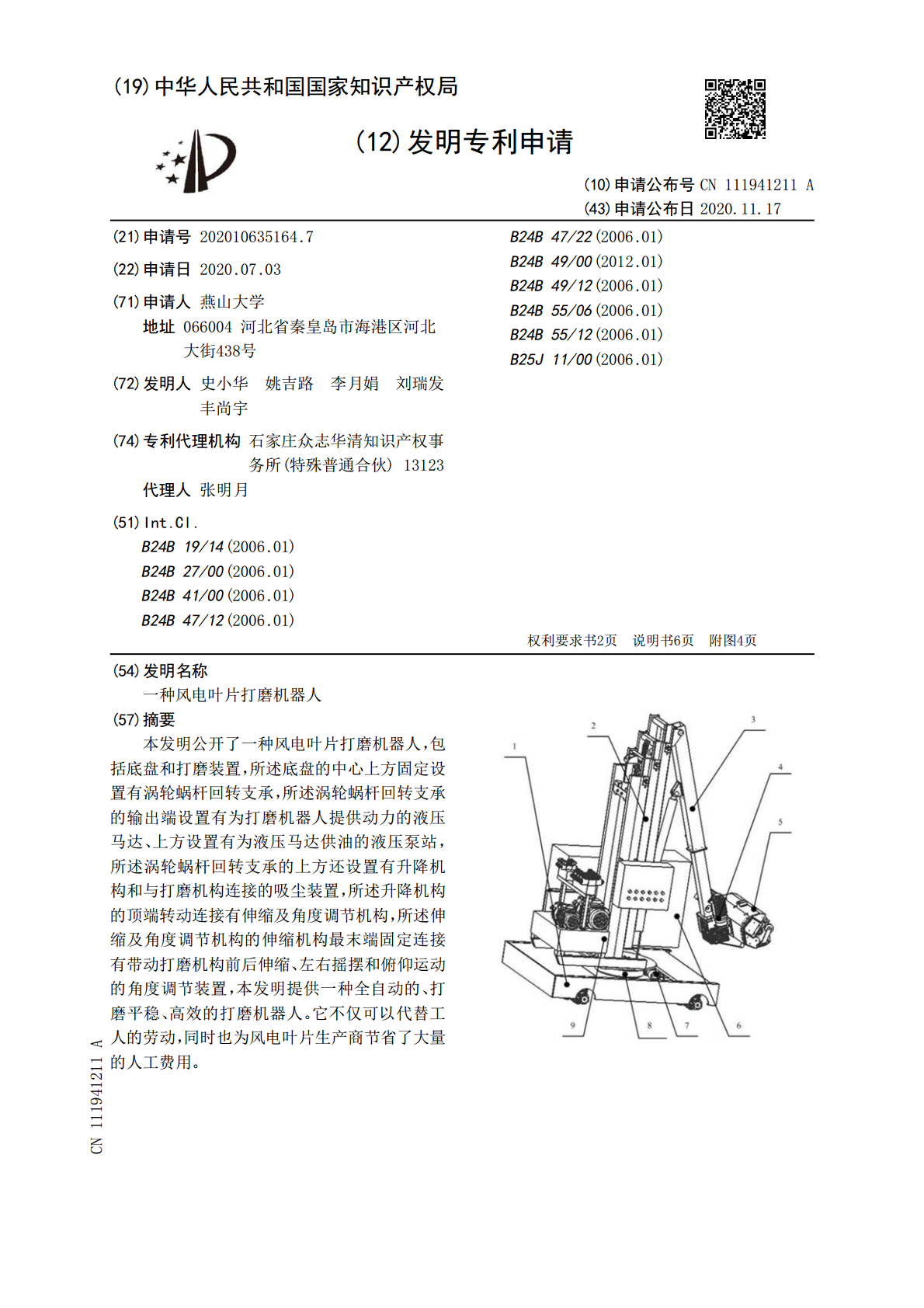
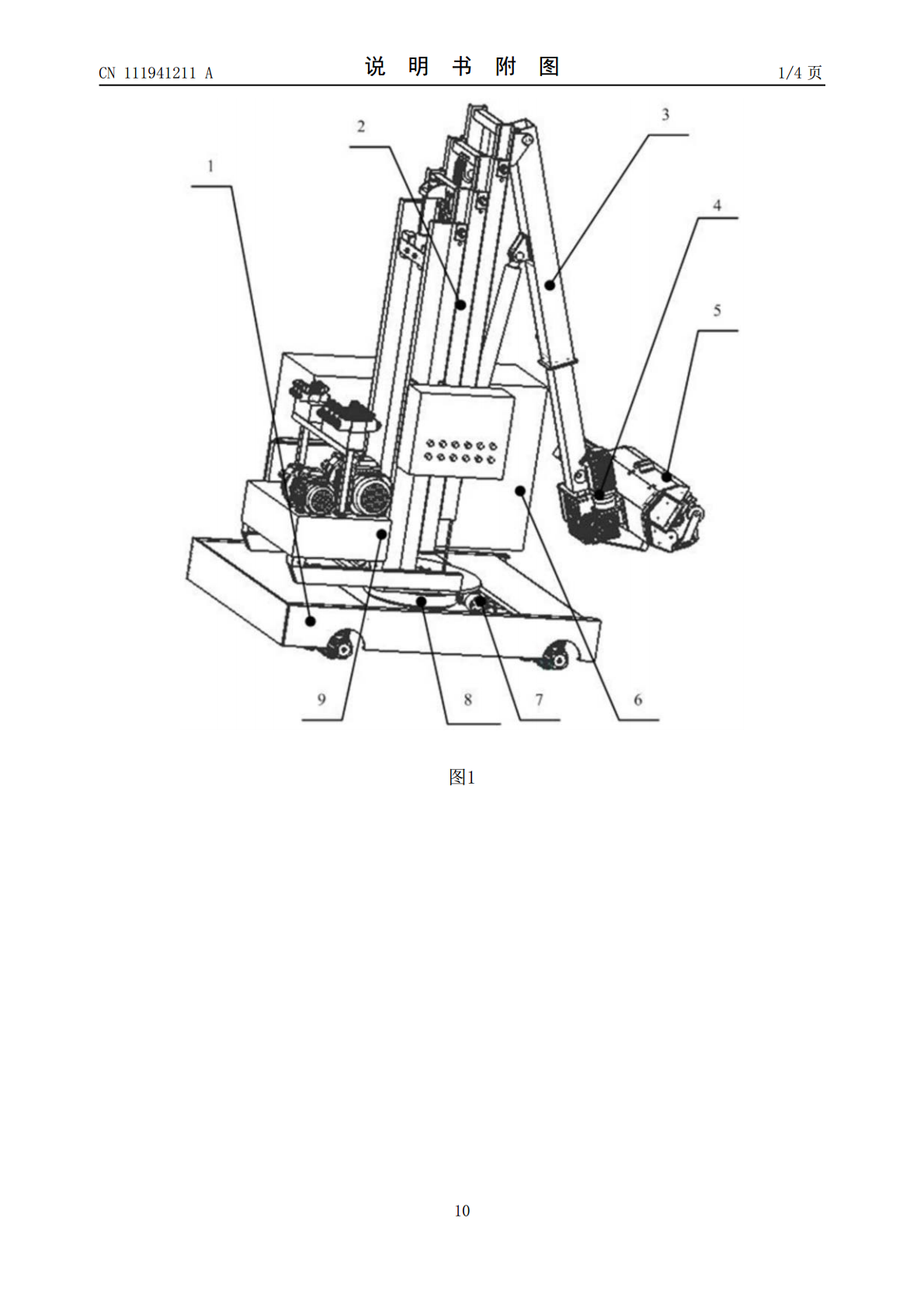
本发明公开了一种风电叶片打磨机器人,包括底盘和打磨装置,所述底盘的中心上方固定设置有涡轮蜗杆回转支承,所述涡轮蜗杆回转支承的输出端设置有为打磨机器人提供动力的液压马达、上方设置有为液压马达供油的液压泵站,所述涡轮蜗杆回转支承的上方还设置有升降机构和与打磨机构连接的吸尘装置,所述升降机构的顶端转动连接有伸缩及角度调节机构,所述伸缩及角度调节机构的伸缩机构最末端固定连接有带动打磨机构前后伸缩、左右摇摆和俯仰运动的角度调节装置,本发明提供一种全自动的、打磨平稳、高效的打磨机器人。它不仅可以代替工人的劳动,同时也
一种风电叶片根部打磨装置.pdf
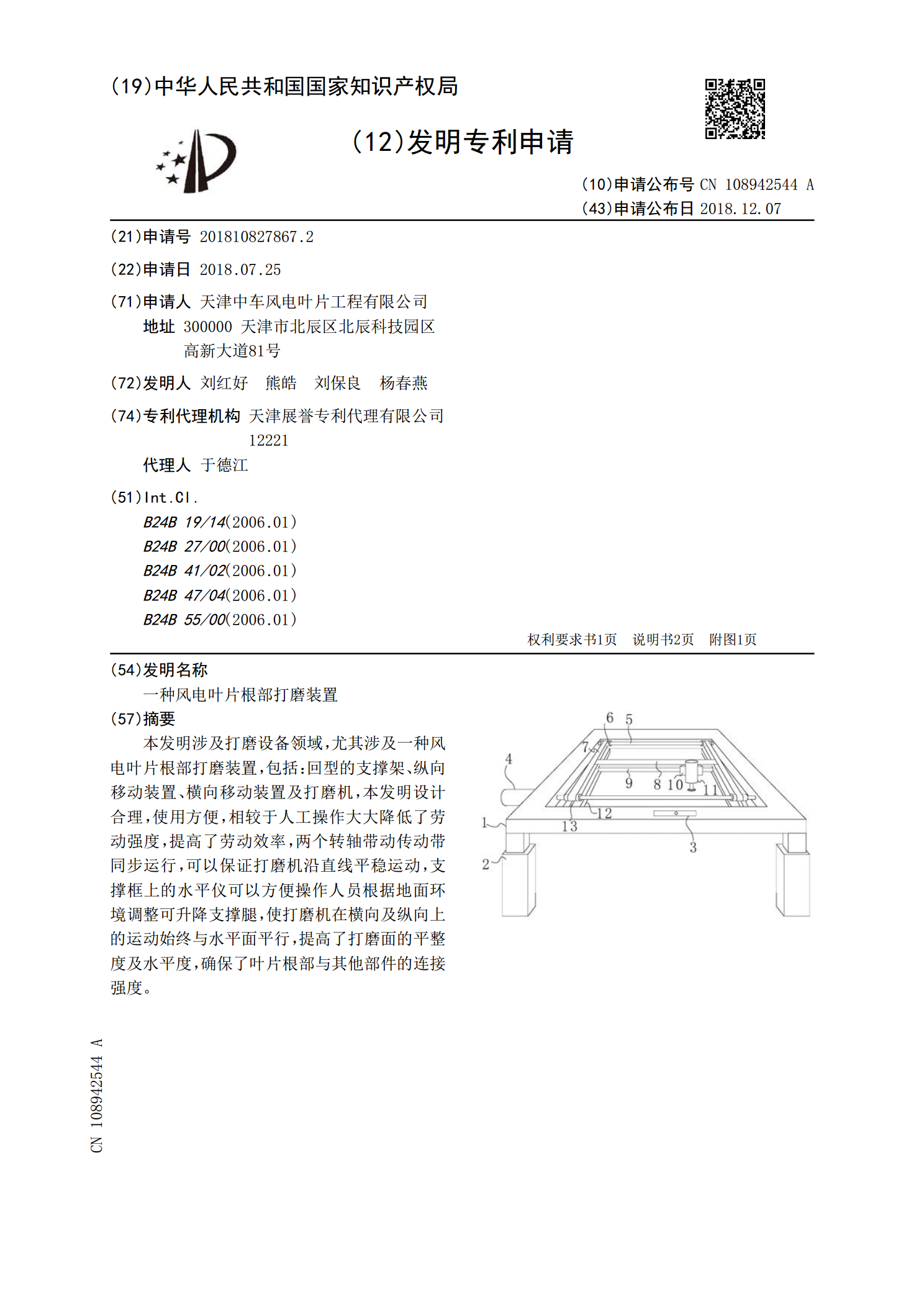
本发明涉及打磨设备领域,尤其涉及一种风电叶片根部打磨装置,包括:回型的支撑架、纵向移动装置、横向移动装置及打磨机,本发明设计合理,使用方便,相较于人工操作大大降低了劳动强度,提高了劳动效率,两个转轴带动传动带同步运行,可以保证打磨机沿直线平稳运动,支撑框上的水平仪可以方便操作人员根据地面环境调整可升降支撑腿,使打磨机在横向及纵向上的运动始终与水平面平行,提高了打磨面的平整度及水平度,确保了叶片根部与其他部件的连接强度。
一种风电叶片打磨机的除尘装置.pdf
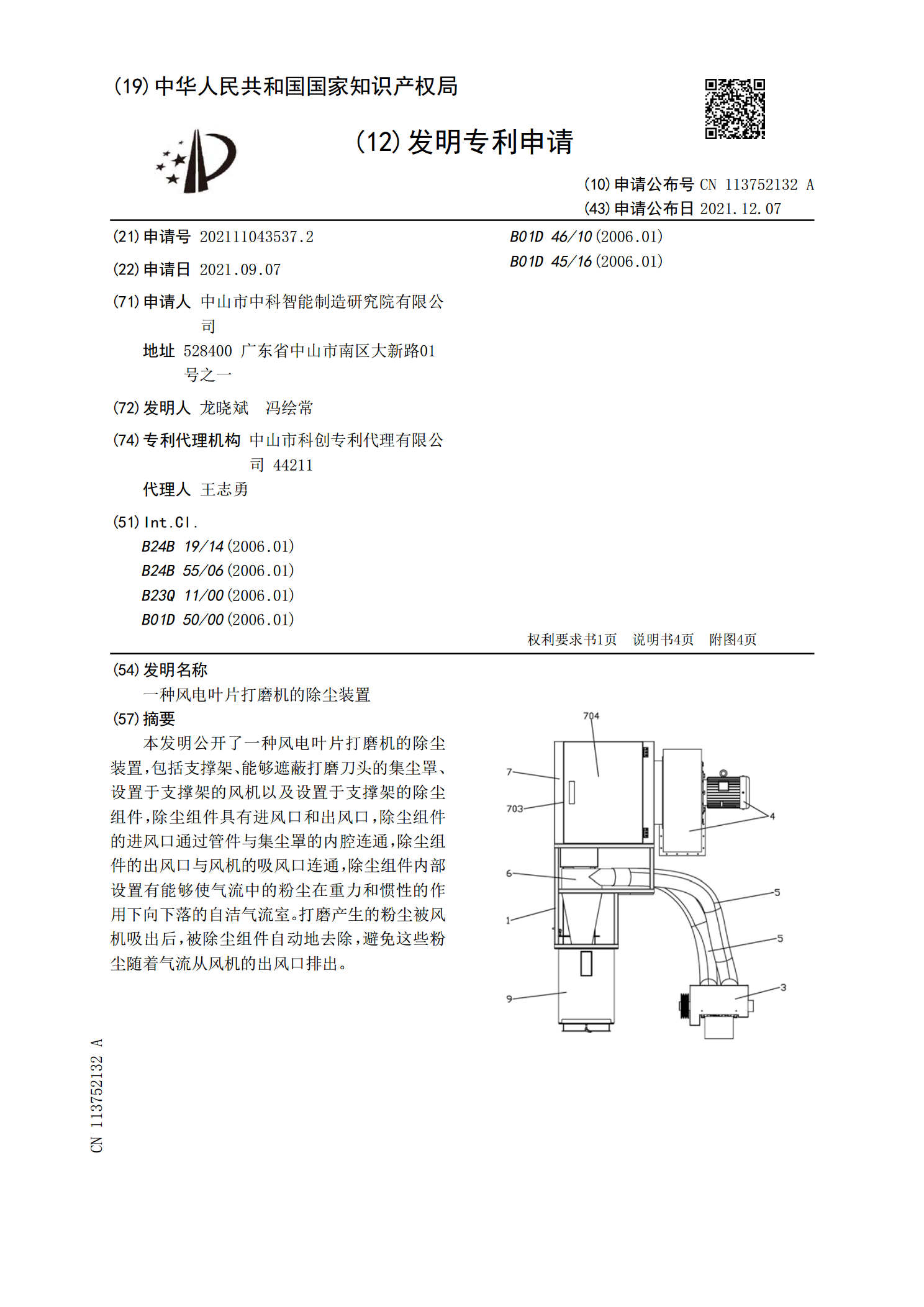
本发明公开了一种风电叶片打磨机的除尘装置,包括支撑架、能够遮蔽打磨刀头的集尘罩、设置于支撑架的风机以及设置于支撑架的除尘组件,除尘组件具有进风口和出风口,除尘组件的进风口通过管件与集尘罩的内腔连通,除尘组件的出风口与风机的吸风口连通,除尘组件内部设置有能够使气流中的粉尘在重力和惯性的作用下向下落的自洁气流室。打磨产生的粉尘被风机吸出后,被除尘组件自动地去除,避免这些粉尘随着气流从风机的出风口排出。
一种风电叶片检测机器人.pdf
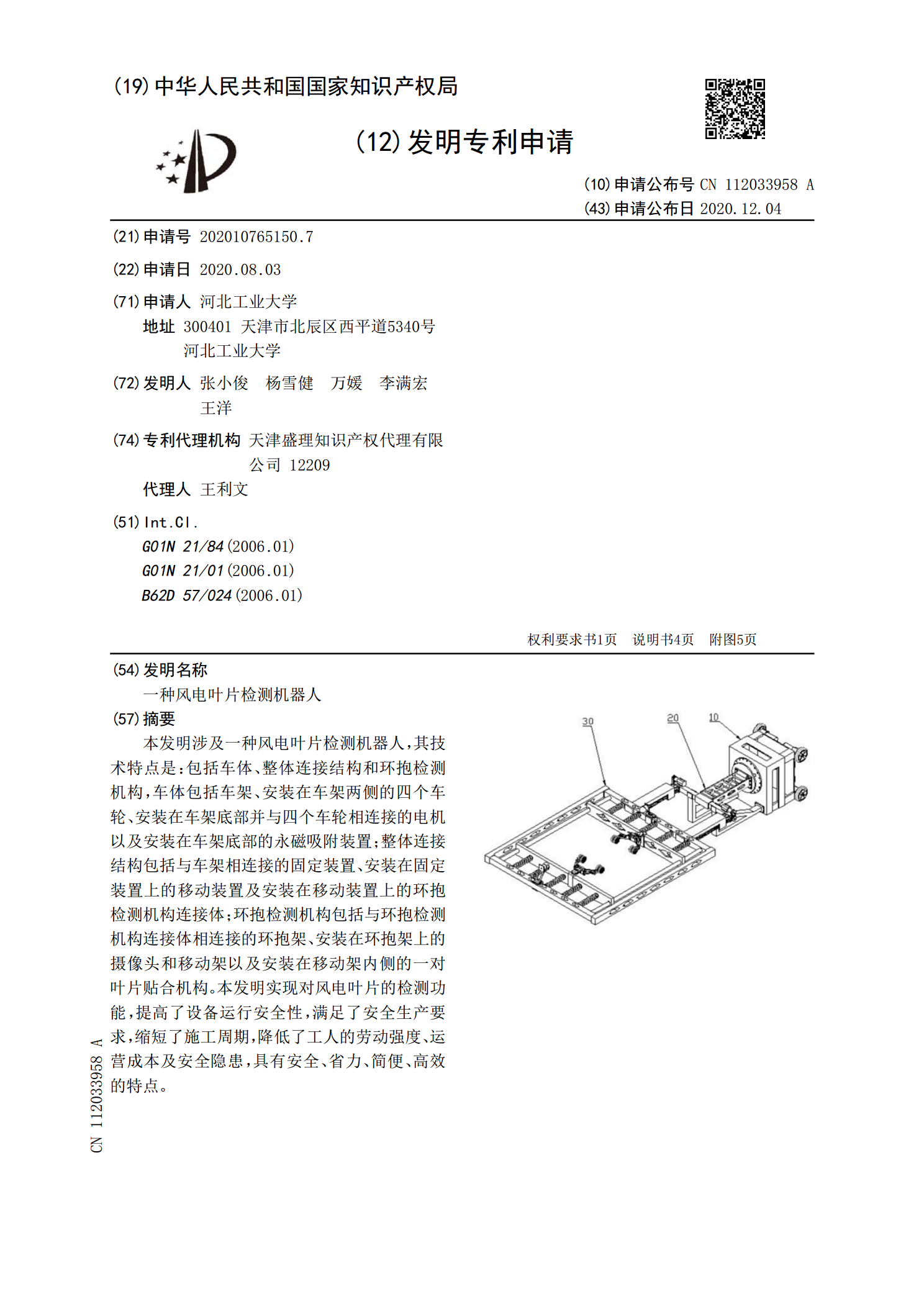
本发明涉及一种风电叶片检测机器人,其技术特点是:包括车体、整体连接结构和环抱检测机构,车体包括车架、安装在车架两侧的四个车轮、安装在车架底部并与四个车轮相连接的电机以及安装在车架底部的永磁吸附装置;整体连接结构包括与车架相连接的固定装置、安装在固定装置上的移动装置及安装在移动装置上的环抱检测机构连接体;环抱检测机构包括与环抱检测机构连接体相连接的环抱架、安装在环抱架上的摄像头和移动架以及安装在移动架内侧的一对叶片贴合机构。本发明实现对风电叶片的检测功能,提高了设备运行安全性,满足了安全生产要求,缩短了施工
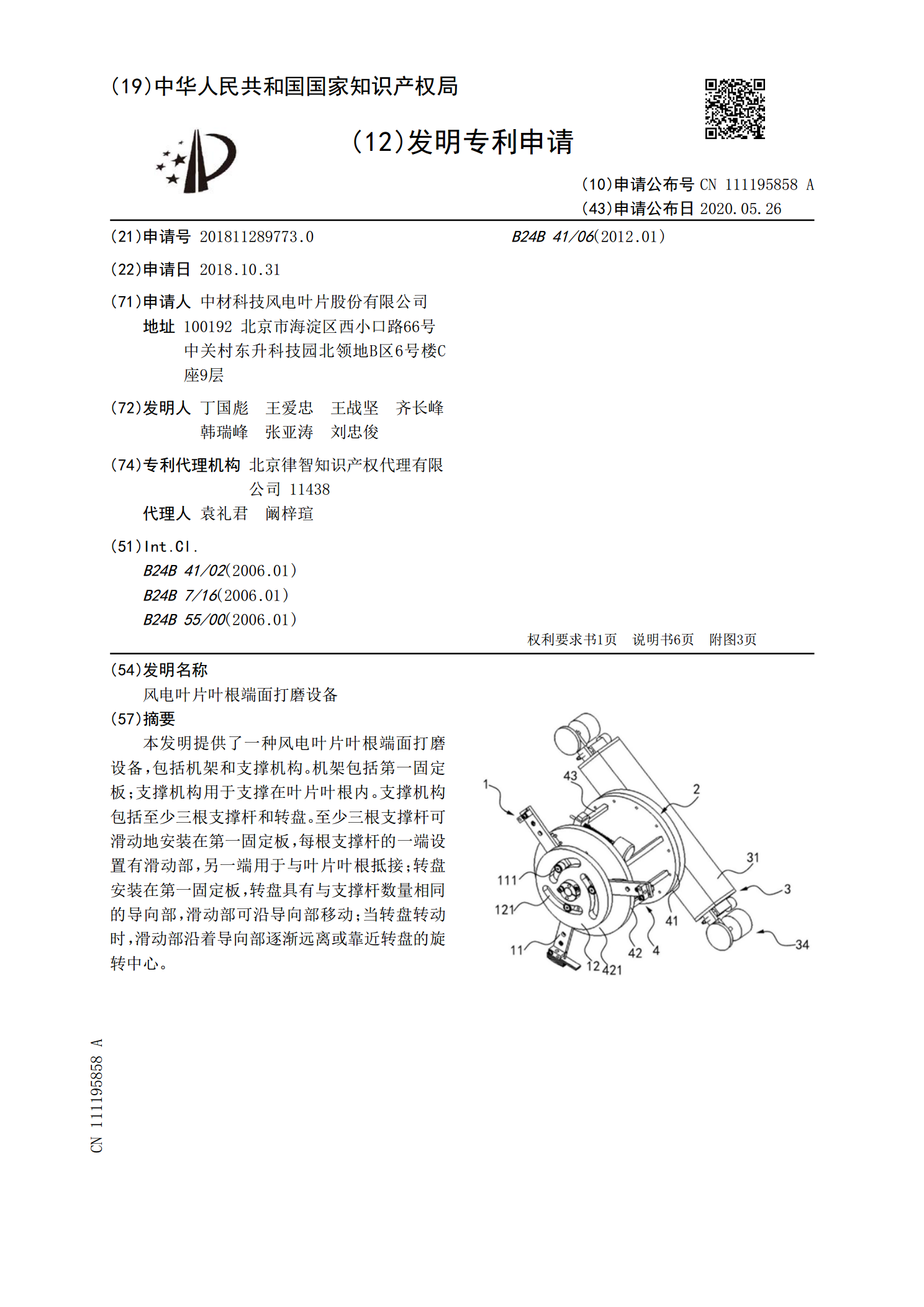
风电叶片叶根端面打磨设备.pdf
本发明提供了一种风电叶片叶根端面打磨设备,包括机架和支撑机构。机架包括第一固定板;支撑机构用于支撑在叶片叶根内。支撑机构包括至少三根支撑杆和转盘。至少三根支撑杆可滑动地安装在第一固定板,每根支撑杆的一端设置有滑动部,另一端用于与叶片叶根抵接;转盘安装在第一固定板,转盘具有与支撑杆数量相同的导向部,滑动部可沿导向部移动;当转盘转动时,滑动部沿着导向部逐渐远离或靠近转盘的旋转中心。