
基于机器视觉的工件识别和定位文献综述【实用文档】doc.doc

天马****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共45页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机器视觉的工件识别和定位文献综述【实用文档】doc.doc
基于机器视觉的工件识别和定位文献综述【实用文档】doc文档可直接使用可编辑,欢迎下载基于机器视觉的工件识别和定位文献综述前言工业机器人的现状与发展趋势机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用.《2l世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l世纪日本产业竞争力的产业战略之一,具

基于机器视觉的工件识别和定位文献综述(完整资料).doc
基于机器视觉的工件识别和定位文献综述(完整资料)(可以直接使用,可编辑优秀版资料,欢迎下载)基于机器视觉的工件识别和定位文献综述前言工业机器人的现状与发展趋势机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用.《2l世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l世纪日本产业竞争力的产业战略
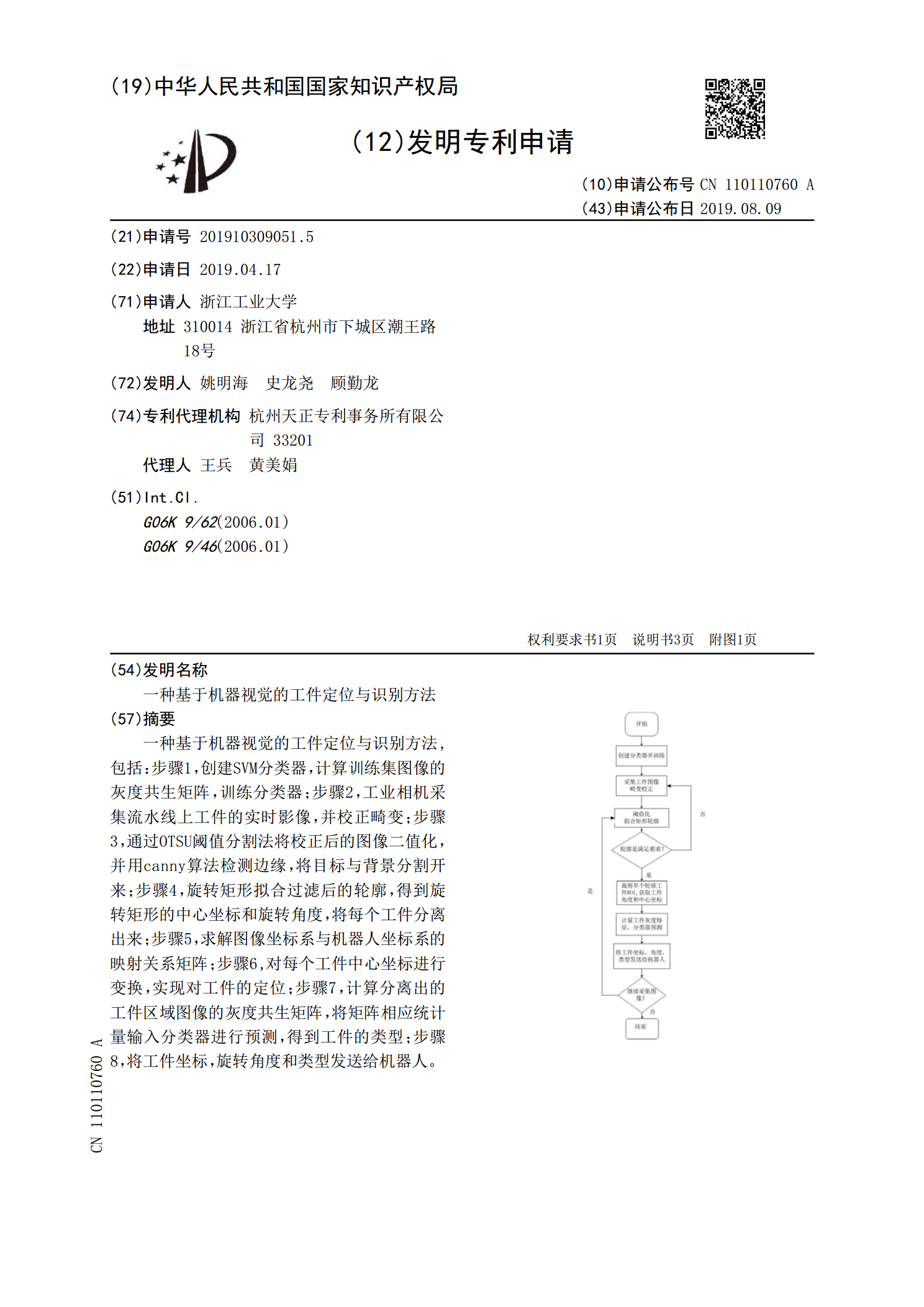
一种基于机器视觉的工件定位与识别方法.pdf
一种基于机器视觉的工件定位与识别方法,包括:步骤1,创建SVM分类器,计算训练集图像的灰度共生矩阵,训练分类器;步骤2,工业相机采集流水线上工件的实时影像,并校正畸变;步骤3,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;步骤4,旋转矩形拟合过滤后的轮廓,得到旋转矩形的中心坐标和旋转角度,将每个工件分离出来;步骤5,求解图像坐标系与机器人坐标系的映射关系矩阵;步骤6,对每个工件中心坐标进行变换,实现对工件的定位;步骤7,计算分离出的工件区域图像的灰度共生矩阵
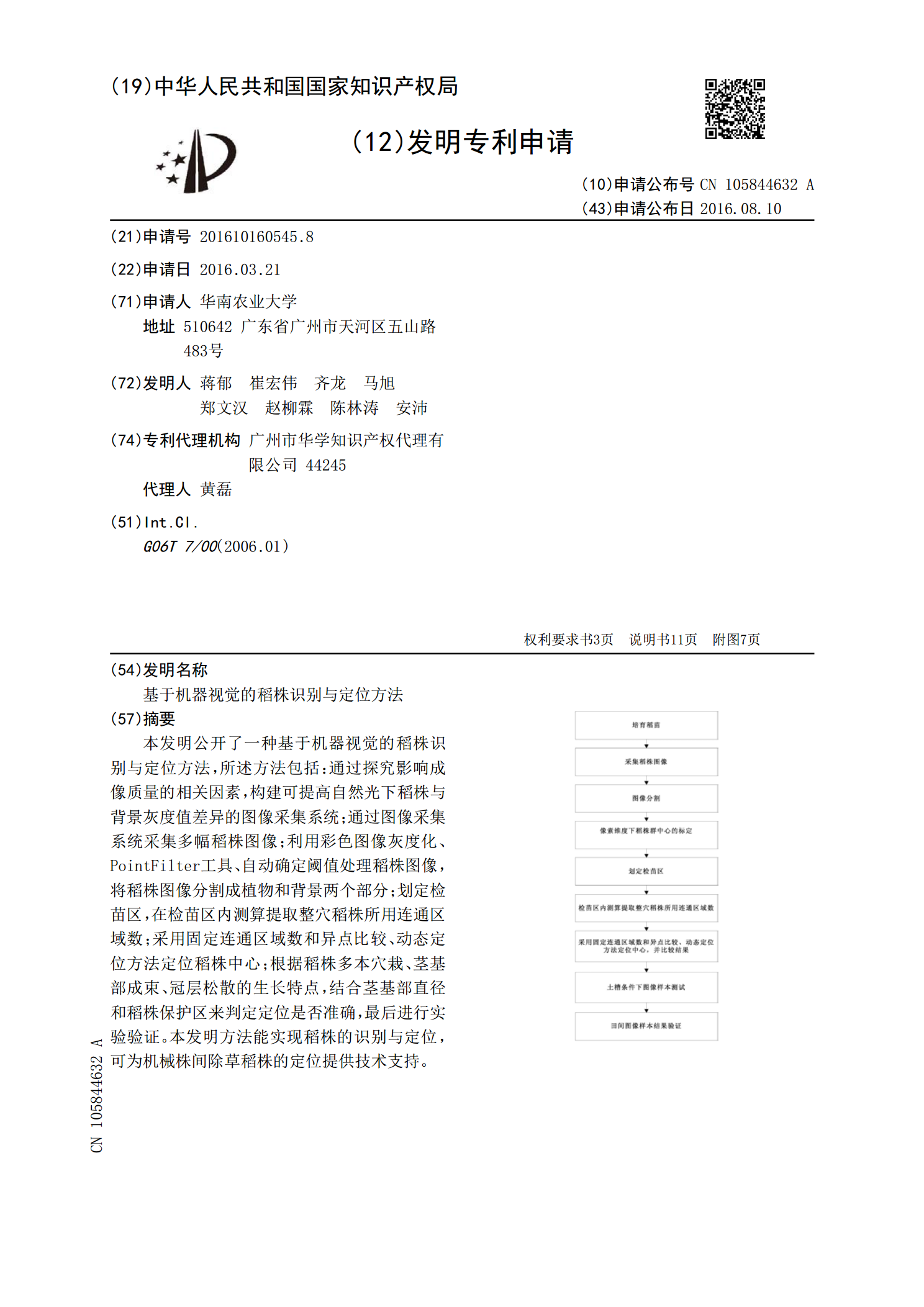
基于机器视觉的稻株识别与定位方法.pdf
本发明公开了一种基于机器视觉的稻株识别与定位方法,所述方法包括:通过探究影响成像质量的相关因素,构建可提高自然光下稻株与背景灰度值差异的图像采集系统;通过图像采集系统采集多幅稻株图像;利用彩色图像灰度化、PointFilter工具、自动确定阈值处理稻株图像,将稻株图像分割成植物和背景两个部分;划定检苗区,在检苗区内测算提取整穴稻株所用连通区域数;采用固定连通区域数和异点比较、动态定位方法定位稻株中心;根据稻株多本穴栽、茎基部成束、冠层松散的生长特点,结合茎基部直径和稻株保护区来判定定位是否准确,最后进行实
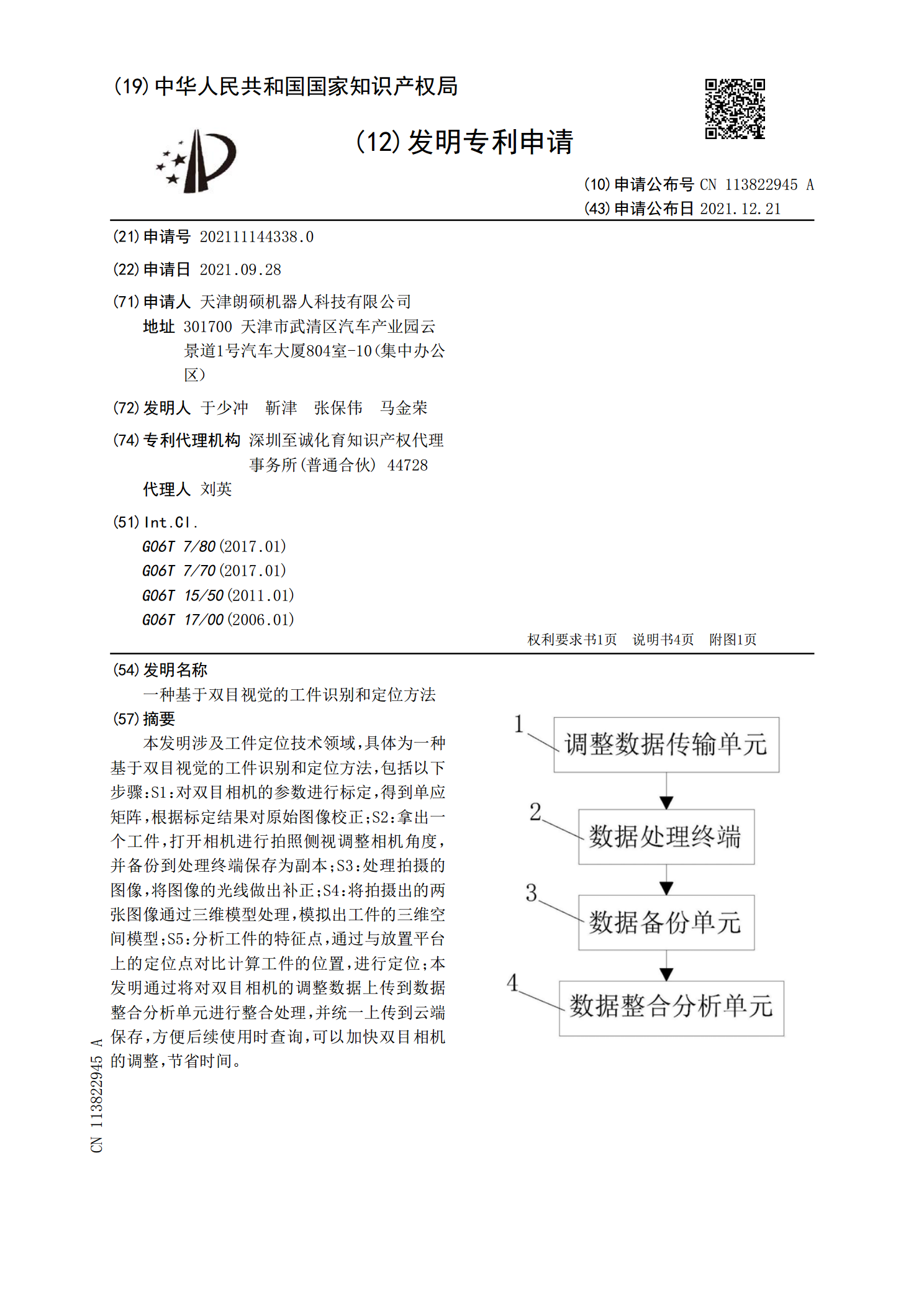
一种基于双目视觉的工件识别和定位方法.pdf
本发明涉及工件定位技术领域,具体为一种基于双目视觉的工件识别和定位方法,包括以下步骤:S1:对双目相机的参数进行标定,得到单应矩阵,根据标定结果对原始图像校正;S2:拿出一个工件,打开相机进行拍照侧视调整相机角度,并备份到处理终端保存为副本;S3:处理拍摄的图像,将图像的光线做出补正;S4:将拍摄出的两张图像通过三维模型处理,模拟出工件的三维空间模型;S5:分析工件的特征点,通过与放置平台上的定位点对比计算工件的位置,进行定位;本发明通过将对双目相机的调整数据上传到数据整合分析单元进行整合处理,并统一上传