
一种基于一维码的多线阵相机快速标定带及标定系统.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于一维码的多线阵相机快速标定带及标定系统.pdf
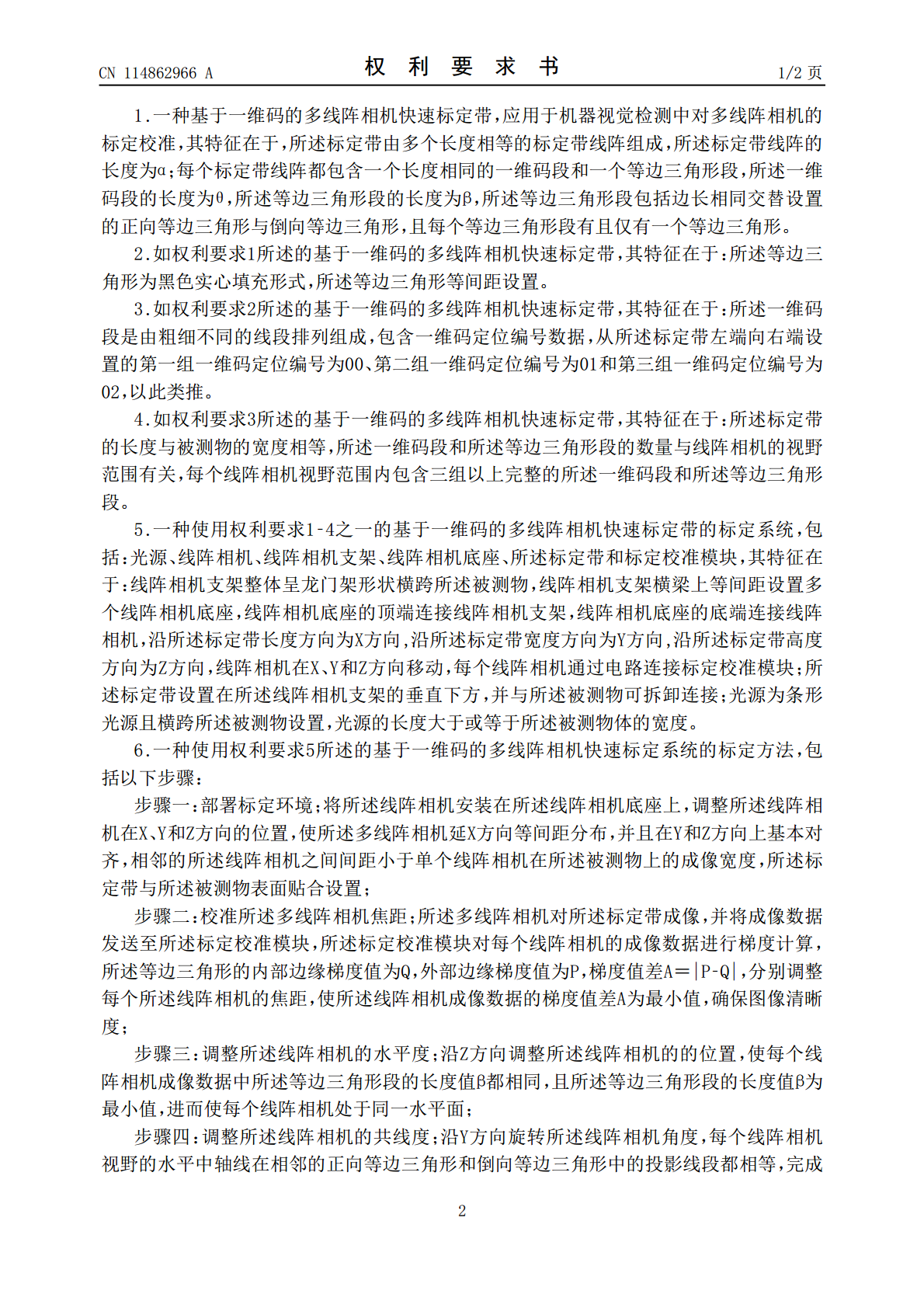
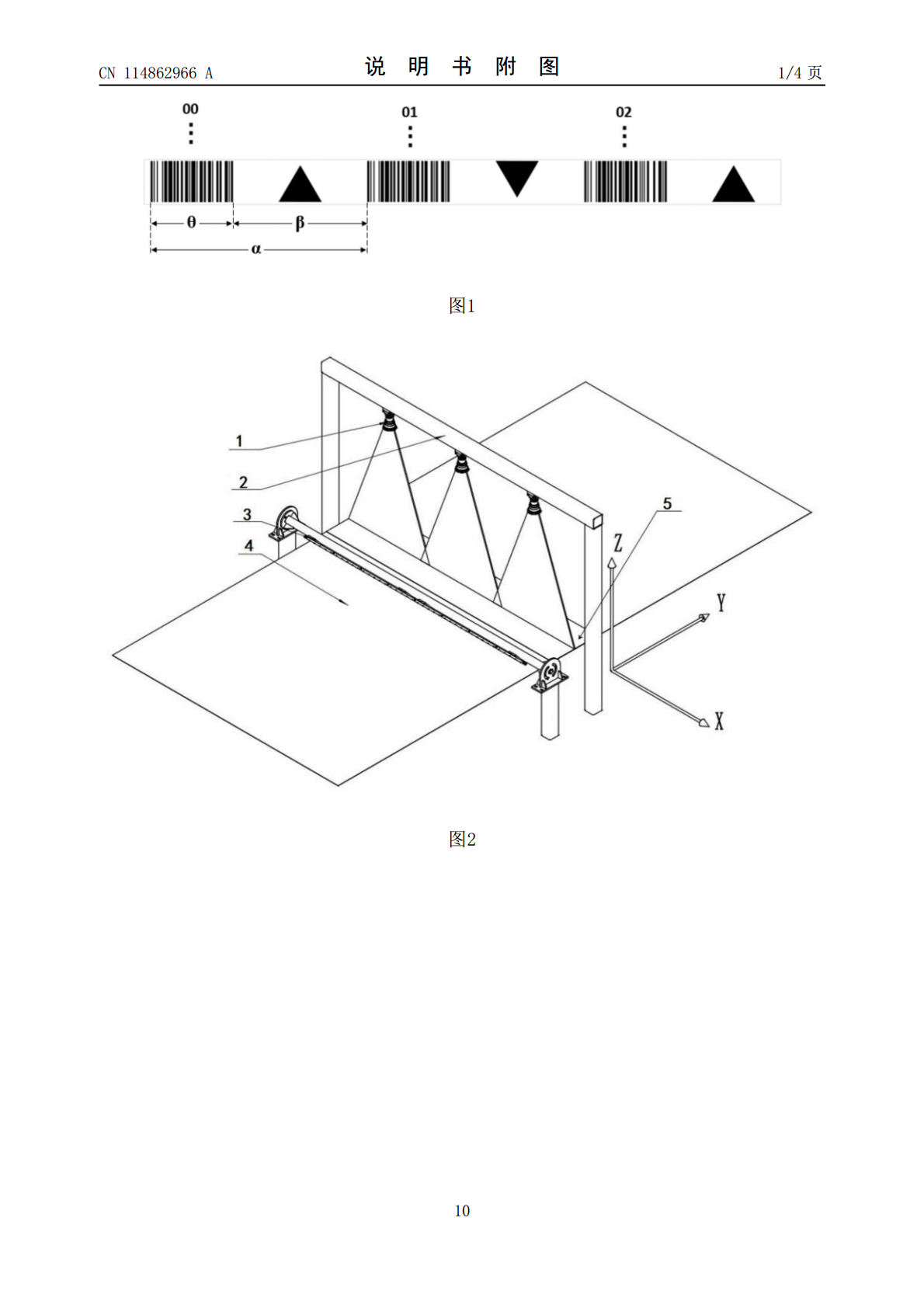
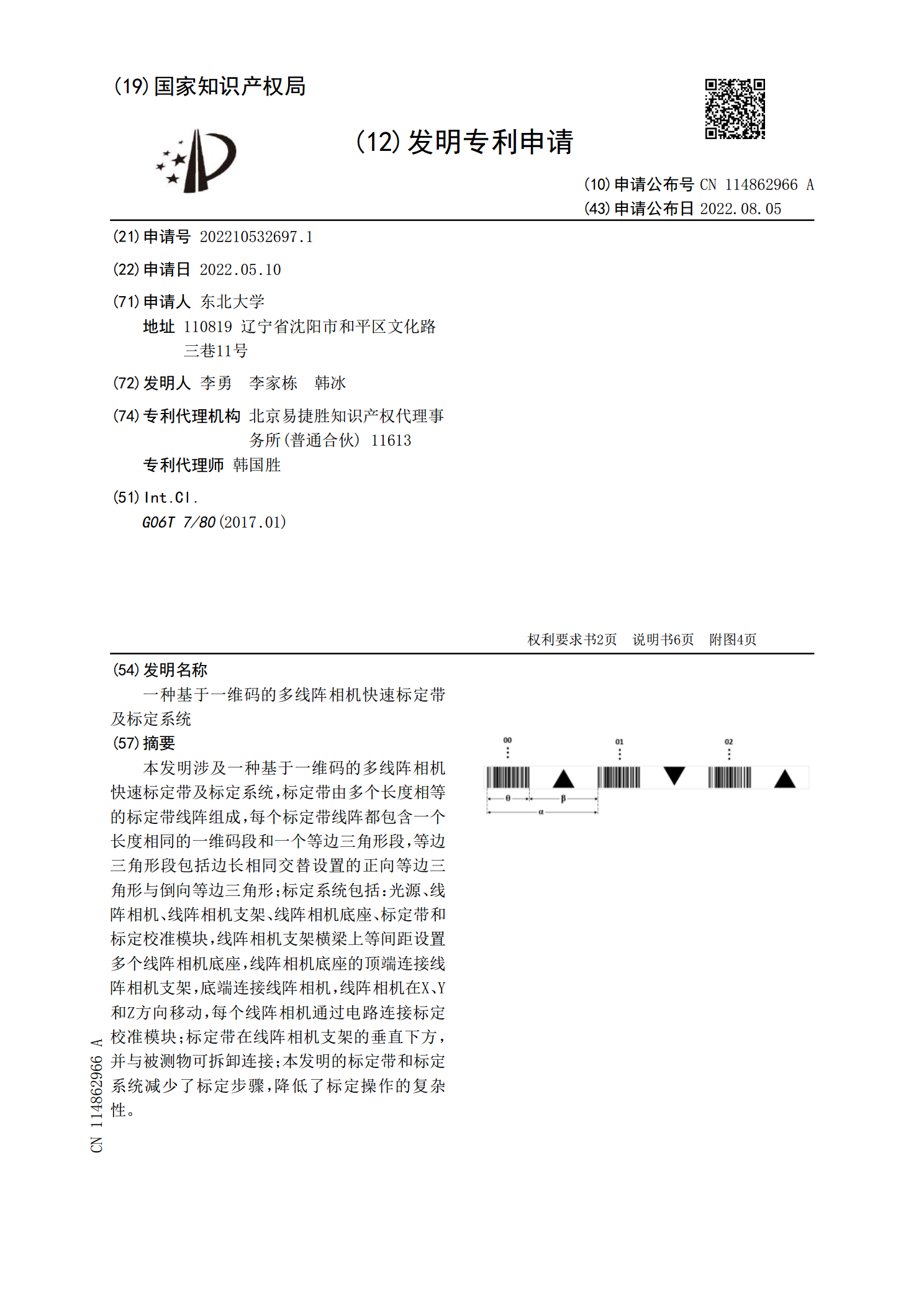
本发明涉及一种基于一维码的多线阵相机快速标定带及标定系统,标定带由多个长度相等的标定带线阵组成,每个标定带线阵都包含一个长度相同的一维码段和一个等边三角形段,等边三角形段包括边长相同交替设置的正向等边三角形与倒向等边三角形;标定系统包括:光源、线阵相机、线阵相机支架、线阵相机底座、标定带和标定校准模块,线阵相机支架横梁上等间距设置多个线阵相机底座,线阵相机底座的顶端连接线阵相机支架,底端连接线阵相机,线阵相机在X、Y和Z方向移动,每个线阵相机通过电路连接标定校准模块;标定带在线阵相机支架的垂直下方,并与被
线阵相机标定方法.pdf
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。
基于激光扫描仪标定线阵相机的系统及方法.pdf
一种基于激光扫描仪标定线阵相机的系统,包括承载装置、激光扫描仪以及解算装置,激光扫描仪安装在承载装置上,承载装置上装设有一支架,用于固定一线阵相机,激光扫描仪位于线阵相机下方,激其激光扫描方向和线阵相机的镜头方向平行,且激光扫描仪和线阵相机的节点在同一竖直直线上,激光扫描仪扫描获取被测目标物体的点云数据,线阵相机拍摄激光扫描仪所扫描的位置以获取被测目标物的图像数据,解算装置接收点云数据和图像数据,并对接收的数据进行特征匹配,以及根据接收的数据运算线阵相机的内方位元素。本发明还提供了一种基于激光扫描仪标定线
一种基于多类型相机的目标定位方法及系统.pdf
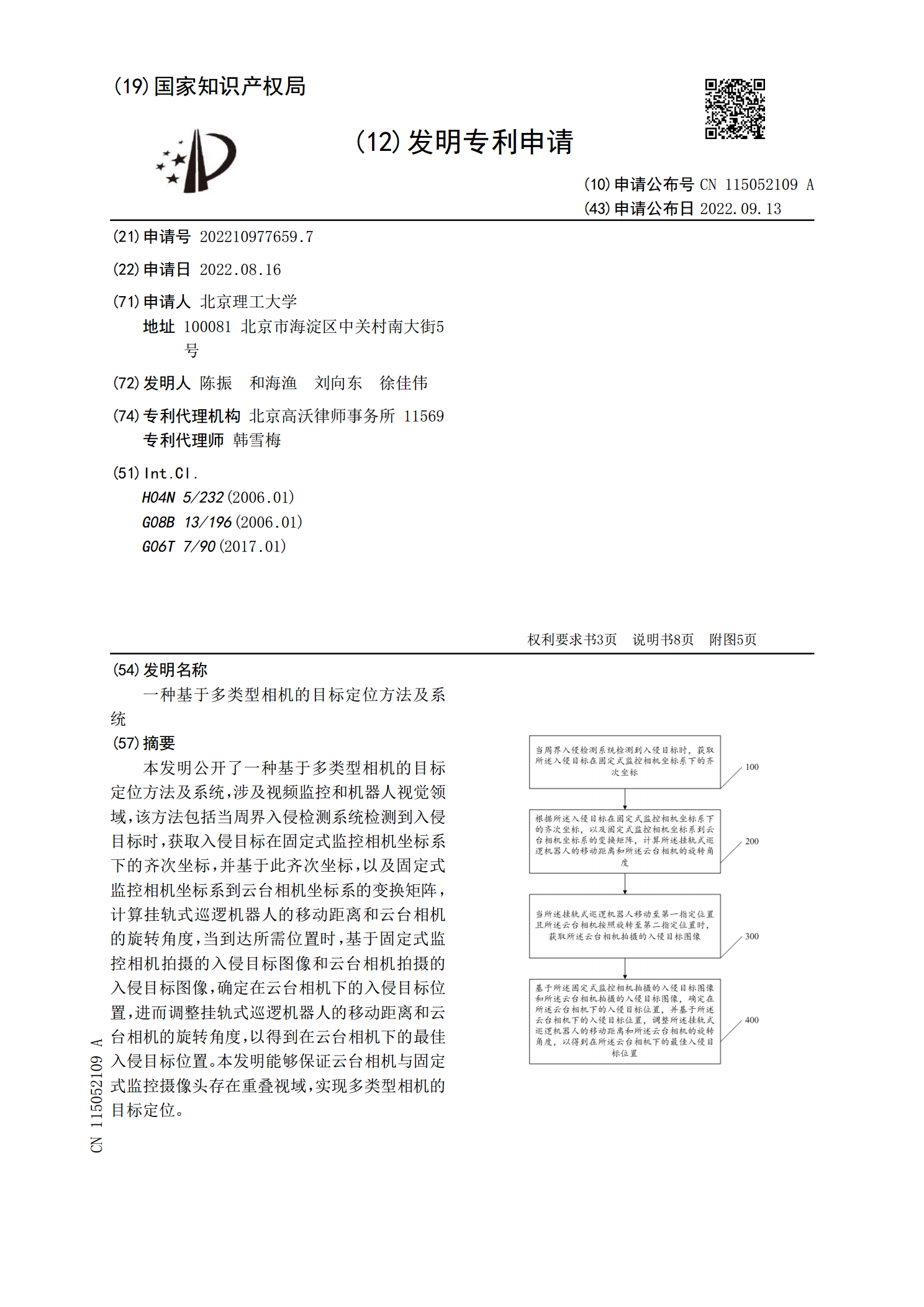
本发明公开了一种基于多类型相机的目标定位方法及系统,涉及视频监控和机器人视觉领域,该方法包括当周界入侵检测系统检测到入侵目标时,获取入侵目标在固定式监控相机坐标系下的齐次坐标,并基于此齐次坐标,以及固定式监控相机坐标系到云台相机坐标系的变换矩阵,计算挂轨式巡逻机器人的移动距离和云台相机的旋转角度,当到达所需位置时,基于固定式监控相机拍摄的入侵目标图像和云台相机拍摄的入侵目标图像,确定在云台相机下的入侵目标位置,进而调整挂轨式巡逻机器人的移动距离和云台相机的旋转角度,以得到在云台相机下的最佳入侵目标位置。本
一种用于立体视觉测量的线阵相机标定装置及标定方法.pdf
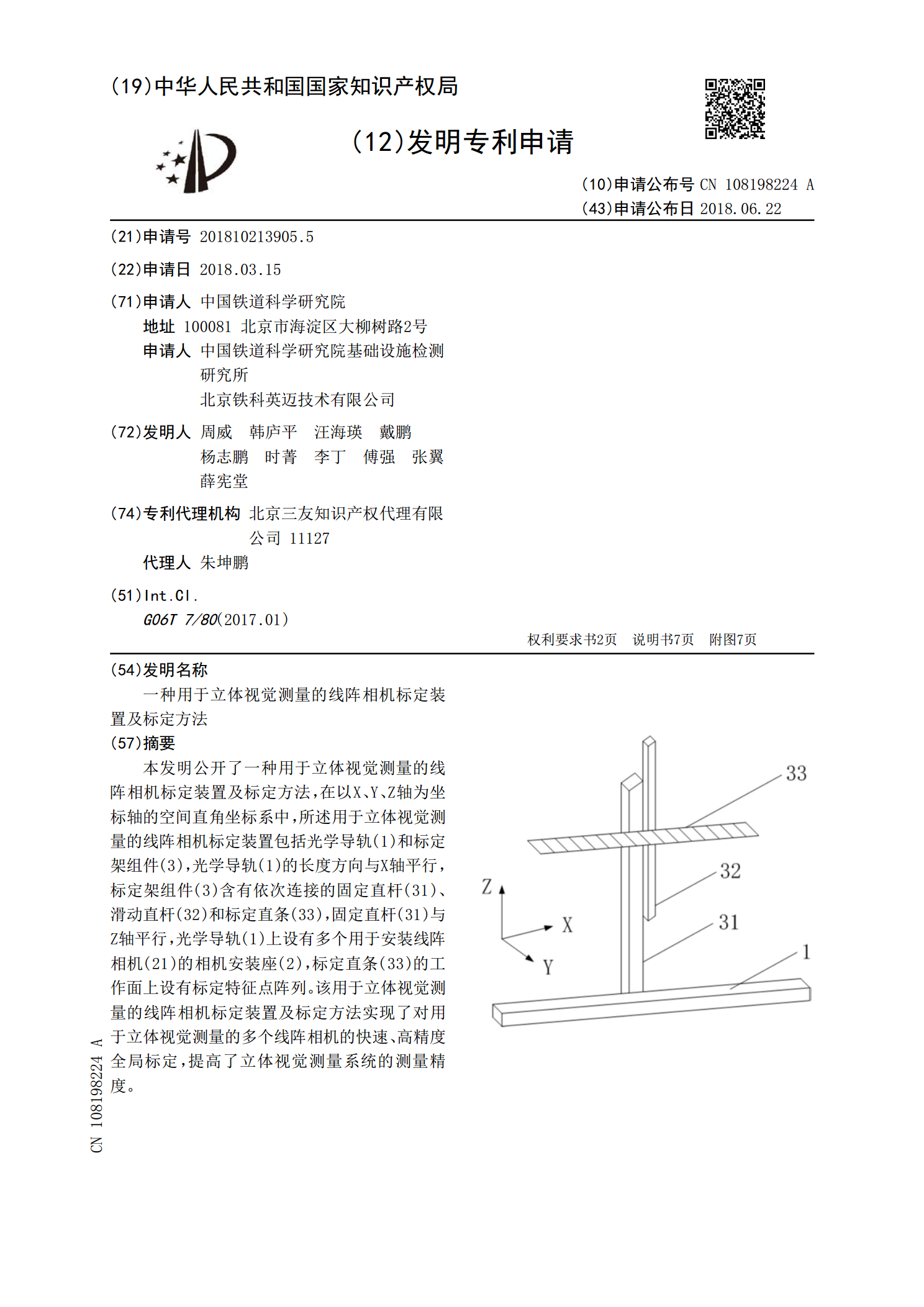
本发明公开了一种用于立体视觉测量的线阵相机标定装置及标定方法,在以X、Y、Z轴为坐标轴的空间直角坐标系中,所述用于立体视觉测量的线阵相机标定装置包括光学导轨(1)和标定架组件(3),光学导轨(1)的长度方向与X轴平行,标定架组件(3)含有依次连接的固定直杆(31)、滑动直杆(32)和标定直条(33),固定直杆(31)与Z轴平行,光学导轨(1)上设有多个用于安装线阵相机(21)的相机安装座(2),标定直条(33)的工作面上设有标定特征点阵列。该用于立体视觉测量的线阵相机标定装置及标定方法实现了对用于立体视觉