
一种基于图像混合机制的鲁棒跨域姿态估计方法及系统.pdf

一吃****春晓

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于图像混合机制的鲁棒跨域姿态估计方法及系统.pdf
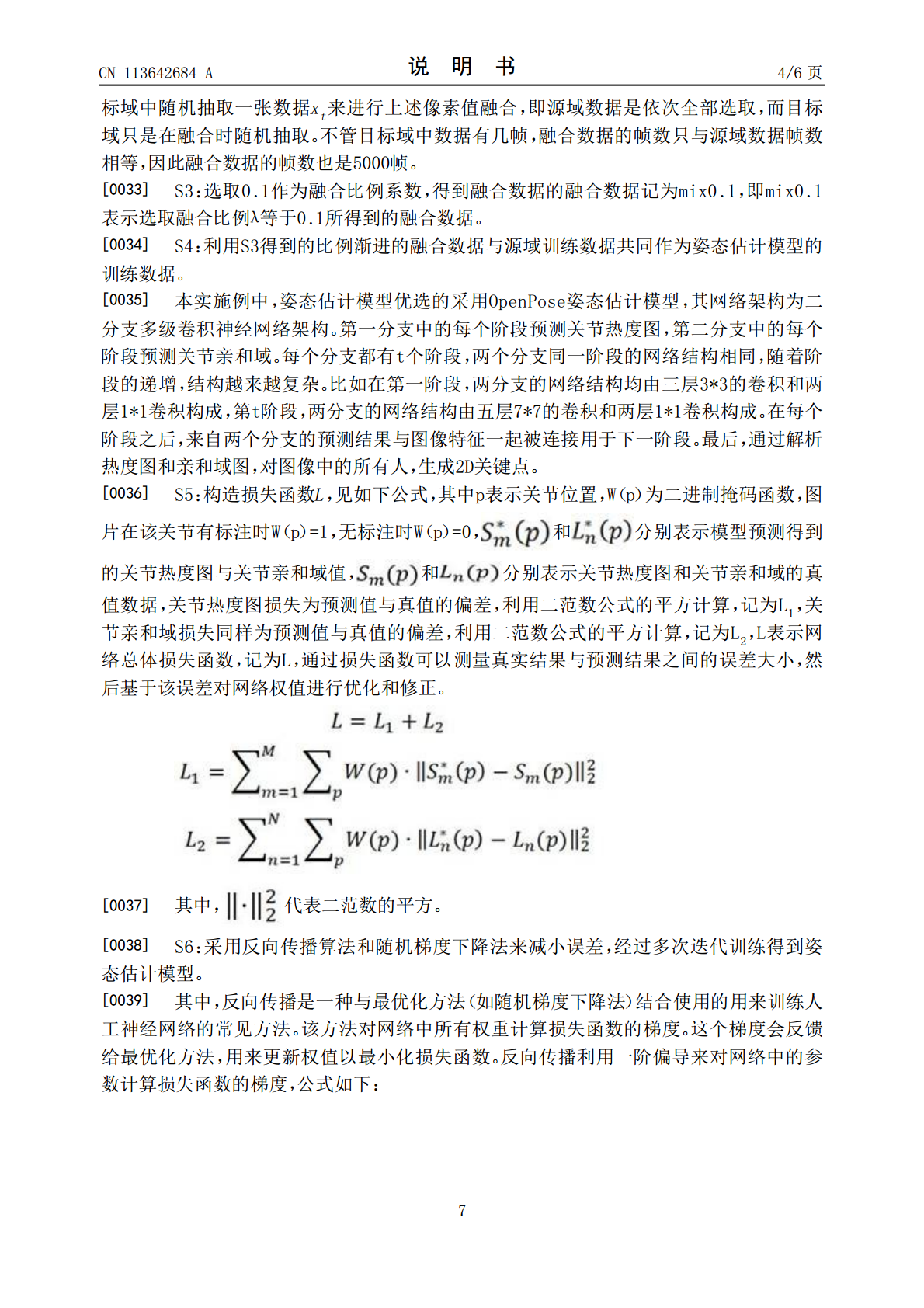
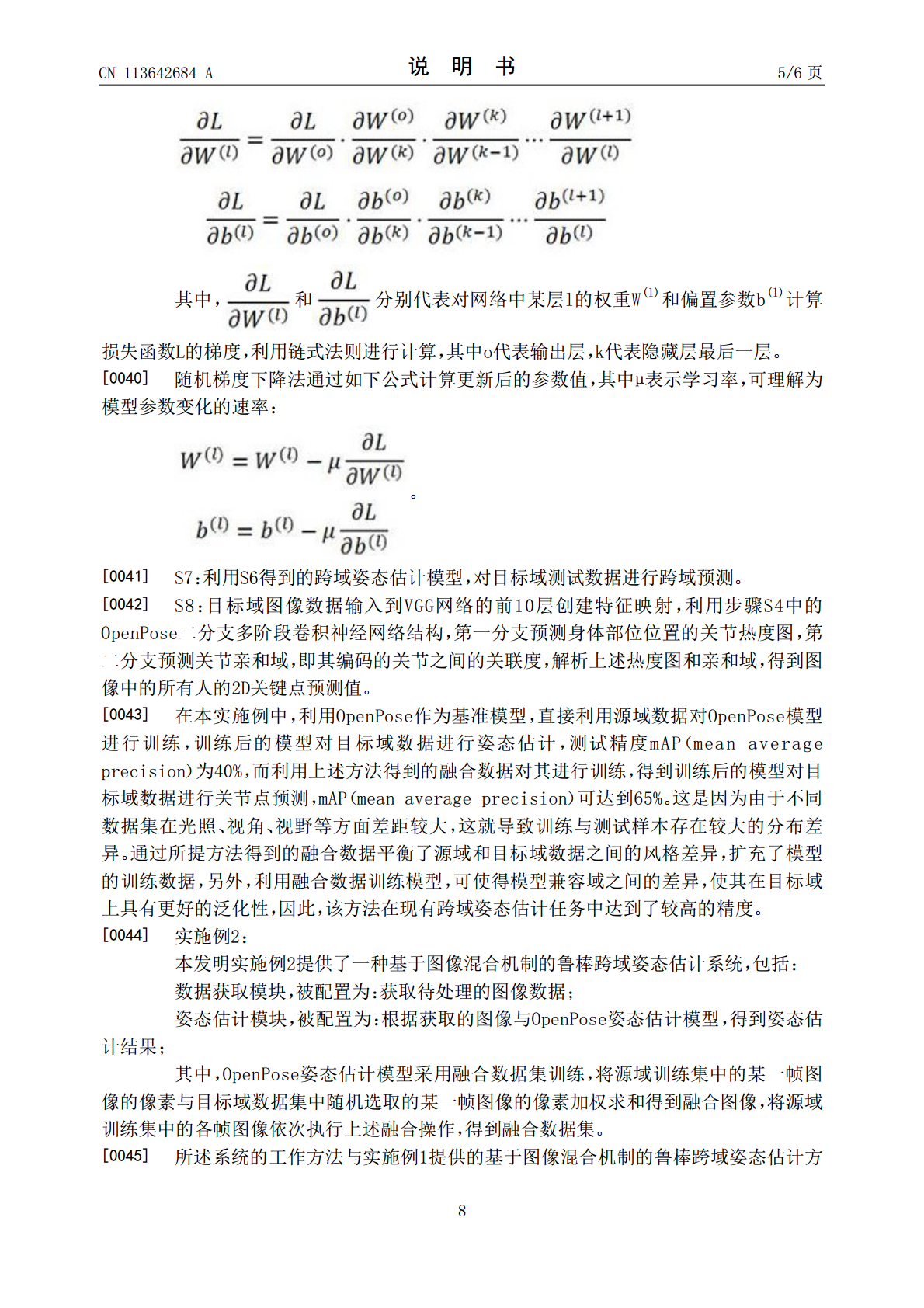
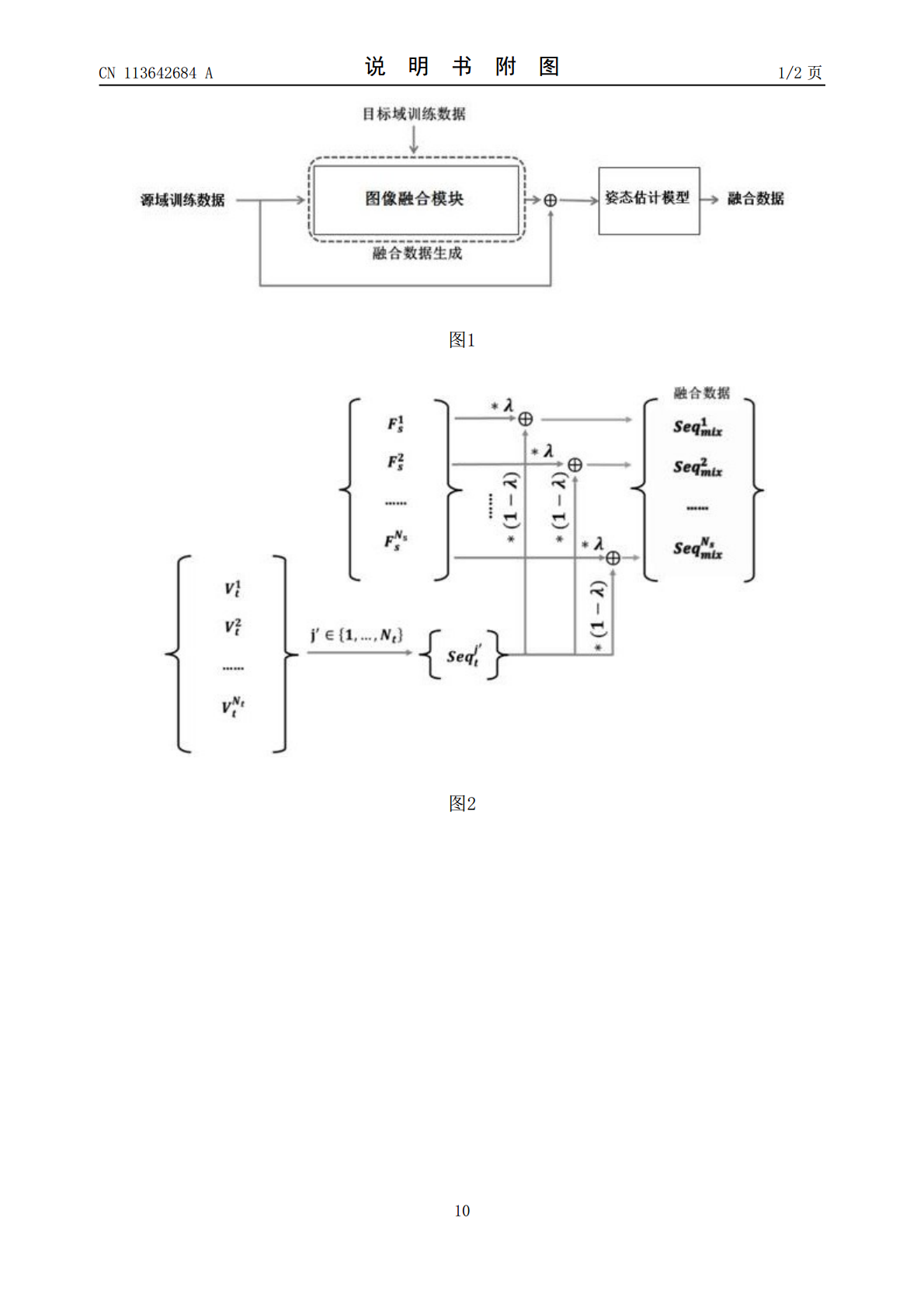
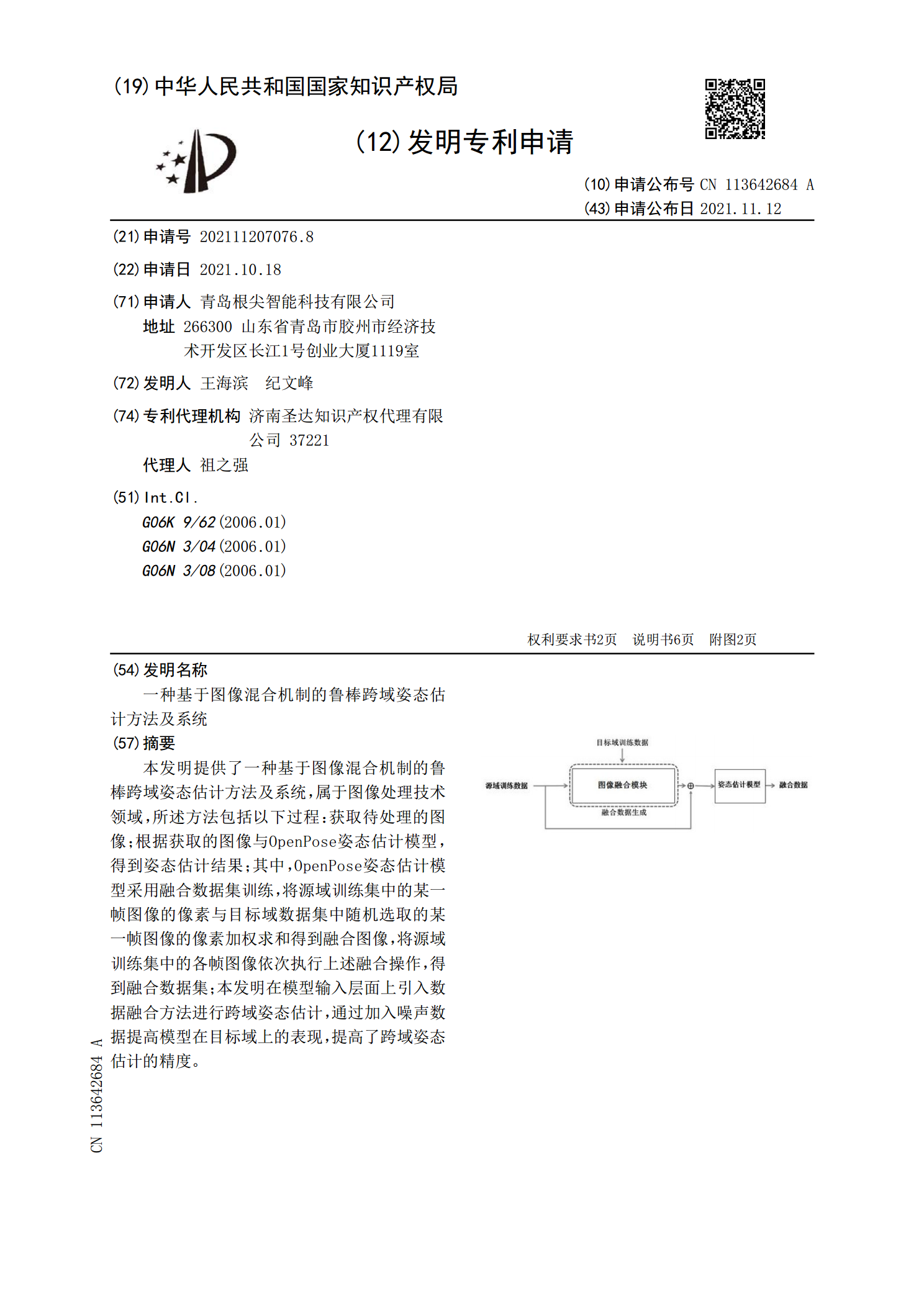
本发明提供了一种基于图像混合机制的鲁棒跨域姿态估计方法及系统,属于图像处理技术领域,所述方法包括以下过程:获取待处理的图像;根据获取的图像与OpenPose姿态估计模型,得到姿态估计结果;其中,OpenPose姿态估计模型采用融合数据集训练,将源域训练集中的某一帧图像的像素与目标域数据集中随机选取的某一帧图像的像素加权求和得到融合图像,将源域训练集中的各帧图像依次执行上述融合操作,得到融合数据集;本发明在模型输入层面上引入数据融合方法进行跨域姿态估计,通过加入噪声数据提高模型在目标域上的表现,提高了跨域姿

一种基于RPA机制的跨域通办方法及系统.pdf
本发明特别涉及一种基于RPA机制的跨域通办方法及系统。该基于RPA机制的跨域通办方法及系统,为每个事项建立业务路由,结合RPA自动化脚本将各个隔离的政务服务平台与跨域通办系统进行打通,通过在跨域通办系统进行业务表单的定制实现业务的集中收件;通过事项路由的定制,结合RPA自动化脚本,实现业务数据从跨域通办系统到业务属地政务服务平台的自动交换,降低业务对接的复杂度,提高系统交付实施的速度。该基于RPA机制的跨域通办方法及系统,提升了现有跨域通办对接过程中的对接效率,降低了系统对接的研发调试成本,对接更灵活,交
一种稠密域图像鲁棒表征方法.pdf
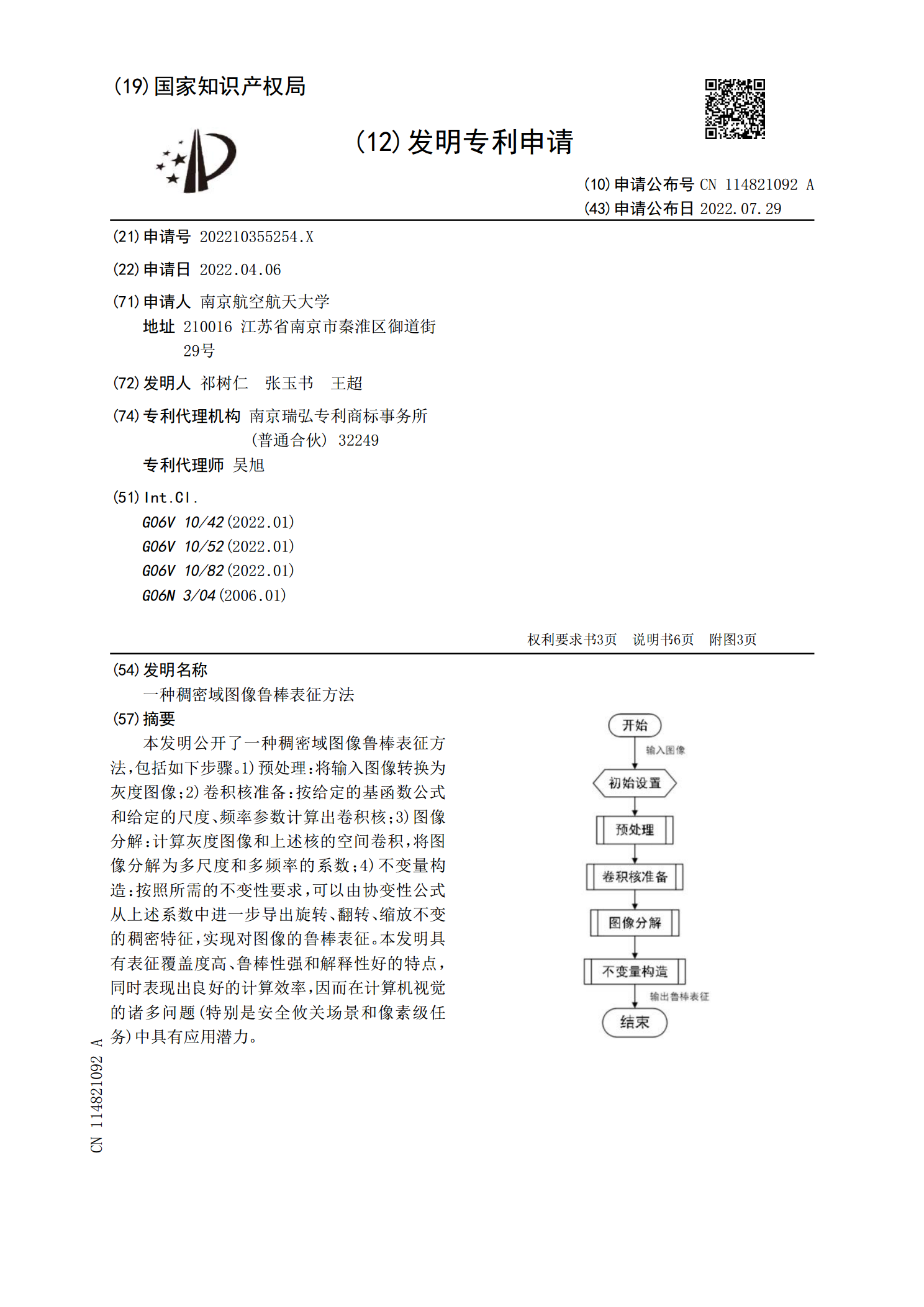
本发明公开了一种稠密域图像鲁棒表征方法,包括如下步骤。1)预处理:将输入图像转换为灰度图像;2)卷积核准备:按给定的基函数公式和给定的尺度、频率参数计算出卷积核;3)图像分解:计算灰度图像和上述核的空间卷积,将图像分解为多尺度和多频率的系数;4)不变量构造:按照所需的不变性要求,可以由协变性公式从上述系数中进一步导出旋转、翻转、缩放不变的稠密特征,实现对图像的鲁棒表征。本发明具有表征覆盖度高、鲁棒性强和解释性好的特点,同时表现出良好的计算效率,因而在计算机视觉的诸多问题(特别是安全攸关场景和像素级任务)中

基于自适应高斯混合模型的鲁棒图像分割方法.pdf
本发明公开一种可提高高斯混合模型分割精度、降低高斯混合模型对噪声敏感度的基于自适应高斯混合模型的鲁棒图像分割方法,按照如下步骤进行:把图像由RGB颜色空间转换到颜色空间,对得到的三个分量做非下采样轮廓变换分解,对得到的高频子带做硬阈值去噪处理,使用去噪后的高频子带和原来的低频子带进行非下采样轮廓变换重构,得到去噪后的三个分量;把得到的去噪后的三分量使用模糊C均值算法分类,使用分类结果初始化自适应高斯混合模型参数,使用最大后验估计自适应高斯混合模型的参数,建立自适应高斯混合模型;使用最大后验概率分类,得到分

基于级联纠错机制的人体姿态估计方法.pdf
本发明公开了一种基于级联纠错机制的人体姿态追踪方法,主要解决现有技术对人体姿态估计中手腕定位不准确的问题。其包括:1)利用双向树结构模型定位手腕以外的身体各关节点;2)利用光流和粒子滤波初步预测手腕的位置;3)通过光流响应判断初步检测的结果是否可靠,若不可靠,则利用双向图结构模型来定位手腕的位置;4)利用肤色模型来判断双向图结构模型的定位结果是否可靠;5)若双向树结构模型的定位结果不正确,则再利用上一帧的手腕位置估计当前帧的手腕位置。实验结果表明,本发明能更精确地定位手腕的位置,从而取得更好的人体姿态估计